1.本实用新型涉及半导体制造的技术领域,具体涉及一种半导体真空传输系统。
背景技术:
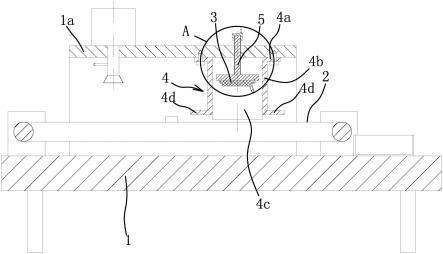
2.图1为典型的半导体真空传输系统,主要由2-efem、3
–
loadlock、4
–
真空传输腔体和5-工艺腔体,其中,1
–
大气机器人为2
–
efem中核心部件,用于将晶圆从前端的大气环境中传输至3-loadlock中,loadlock作为大气和真空的中转腔室,需要频繁的在大气和真空状态中进行切换,loadlock一般有一层或多层用于晶圆存放的槽位。当从efem向loadlock取放晶圆时,需要充入氮气将腔内的压力调整为大气状态,然后开启loadlock靠近efem侧的传输阀,进行晶圆取放;当从真空传输腔体向loadlock取放晶圆时,需要将loadlock中的气体抽出,调整至真空状态,然后开启loadlock靠近真空传输腔体侧的传输阀,进行晶圆取放。
3.由于loadlock需要在真空环境下运行,所以在loadlock内部进行传感器的安装和走线十分困难。目前,loadlock晶圆状态的初始化是通过上位机软件存储或者肉眼观测的方式进行判别,而在设备运行过程中会存在诸多突发停机状况,导致软件存储的loadlock晶圆状态与实际的状态存在不一致,在此种情况下,如果操作员由于疏忽遗漏了状态确认和修正,会导致错误的指令下发,从而导致撞片等故障,造成不必要的经济损失和宕机状况。
技术实现要素:
4.本实用新型提供了一种半导体真空传输系统,通过在大气机器人的末端执行器增设状态检测传感器,就可以实现对loadlock腔体内部各个卡槽中晶圆实际状态的查询,无需额外增加复杂的硬件,在设备初始或者突发紧急停机后,执行该操作,可以有效保证传片的安全性。
5.本实用新型可通过以下技术方案实现:
6.一种半导体真空传输系统,包括真空侧和大气侧,两者通过多个loadlock腔室连通,在大气侧设置有efem,在efem内部设置有大气机器人,在真空侧设置有真空传输腔体以及与真空传输腔体连通的多个工艺腔体,在大气机器人的末端执行器设置有状态检测传感器,所述状态检测传感器与半导体真空传输系统的处理器相连,用于检测loadlock腔室内部的卡槽中是否有晶圆。
7.进一步,所述状态检测传感器设置为两个mapping传感器,其中一个mapping传感器设置在末端执行器的一侧,另一个mapping传感器设置在末端执行器的另一侧,它们相对设置,其光线处于同一直线上。
8.本实用新型有益的技术效果在于:
9.本实用新型的获取方法可以事先获知loadlock腔室的各层卡槽中的晶圆状态,及时进行增补,避免后续取放作业造成碰片等故障,减少不必要的经济损失,提高半导体真空
传输系统的整体智能化水平,同时,本实用新型的获取方法仅需要增设状态检测传感器即可,无需复杂的硬件,可以最大限度地减少成本,便于推广应用。
附图说明
10.图1为本实用新型的现有半导体真空传输系统的总体结构示意图;
11.图2为本实用新型的状态检测传感器的安装状态示意图;
12.图3为本实用新型的第一种检测方式的执行状态示意图;
13.图4为本实用新型的第二种检测方法的执行状态示意图;
14.其中,1-大气机器人,2-efem,3
–
loadlock,4
–
真空传输腔体,5-工艺腔体,6-状态检测传感器,7-末端执行器,8-光线,9-晶圆,10-多层卡槽。
具体实施方式
15.下面结合附图及较佳实施例详细说明本实用新型的具体实施方式。
16.如图1-2所示,本实用新型提供了一种半导体真空传输系统,包括真空侧和大气侧,两者通过多个loadlock腔室连通,在大气侧设置有efem,在efem内部设置有大气机器人,在真空侧设置有真空传输腔体以及与真空传输腔体连通的多个工艺腔体,在大气机器人的末端执行器设置有状态检测传感器,该状态检测传感器与半导体真空传输系统的处理器相连,用于检测loadlock腔室内部的卡槽中是否有晶圆。这样可以事先获知loadlock腔室的各层卡槽中的晶圆状态,及时进行增补,避免后续取放作业造成碰片等故障,减少不必要的经济损失,提高半导体真空传输系统的整体智能化水平,同时,本实用新型的半导体真空传输系统仅需要增设状态检测传感器即可,无需复杂的硬件,可以最大限度地减少成本,便于推广应用。
17.该状态检测传感器设置为两个mapping传感器6,其中一个mapping传感器6设置在末端执行器7的一侧,另一个mapping传感器设置6在末端执行器7的另一侧,它们相对设置,其光线8处于同一直线上,并且当末端执行器7运动至晶圆取放位置时,状态检测传感器的光线被当前层卡槽内部的晶圆9遮挡。该mapping传感器基于光电micromote技术,它将一个极小的光学传感器头与外部处理单元(放大器)组合到一起,两者通过高柔性电缆连接,这意味着可以将传感器应用于任何机械安装方式,经过专业设计改进,使其适合极薄的末端执行器,传感器的光斑均匀且受控性和聚光性极好,因此,该传感器可识别甚至只有几微米厚度的晶圆,精度极高,能可靠识别整个卡槽,重叠的晶圆或歪斜的晶圆等等都能始终得到识别。
18.在进行卡槽内部晶圆状态检测时,可以从两个方面执行,具体如下:
19.第一种,如图3所示,通用的loadlock腔室内部都带有控制卡槽运动的升降机构,因此可以利用升降机构带动当前层卡槽运动至取放位置,停留等待预定时间,该预定时间至少不能小于查询作业所需的时间,以便执行查询作业,之后先启动大气机器人末端执行器的状态检测传感器执行查询作业,判断当前层卡槽内部是否有晶圆,并存储下来,再利用升降机构带动多层卡槽10向上运动,重复上述过程,完成下一层卡槽内部晶圆状态的查询作业,直至完成所有卡槽内部晶圆状态的查询作业;
20.第二种,如图4所示,我们可以保持卡槽不动,驱动大气机器人的末端执行器自下
而上执行查询作业,即将大气机器人的末端执行器从多层卡槽10的最下层运行至最上层,逐层启动查询作业,判断当前层卡槽内部是否有晶圆,并存储下来,当然在末端执行器执行查询作业时,都需要停顿等待预定时间,该预定时间至少不能小于查询作业所需的时间,以便执行查询作业。
21.当然上述两种方法执行之前,都需要事先将大气侧传输阀打开。
22.虽然以上描述了本实用新型的具体实施方式,但是本领域的技术人员应当理解,这些仅是举例说明,在不背离本实用新型的原理和实质的前提下,可以对这些实施方式做出多种变更或修改,因此,本实用新型的保护范围由所附权利要求书限定。
技术特征:
1.一种半导体真空传输系统,包括真空侧和大气侧,两者通过多个loadlock腔室连通,在大气侧设置有efem,在efem内部设置有大气机器人,在真空侧设置有真空传输腔体以及与真空传输腔体连通的多个工艺腔体,其特征在于:在大气机器人的末端执行器设置有状态检测传感器,所述状态检测传感器与半导体真空传输系统的处理器相连,用于检测loadlock腔室内部的卡槽中是否有晶圆。2.根据权利要求1所述的半导体真空传输系统,其特征在于:所述状态检测传感器设置为两个mapping传感器,其中一个mapping传感器设置在末端执行器的一侧,另一个mapping传感器设置在末端执行器的另一侧,它们相对设置,其光线处于同一直线上。
技术总结
本实用新型涉及半导体制造的技术领域,公开了一种半导体真空传输系统,包括真空侧和大气侧,两者通过多个LoadLock腔室连通,在大气侧设置有EFEM,在EFEM内部设置有大气机器人,在真空侧设置有真空传输腔体以及与真空传输腔体连通的多个工艺腔体,在大气机器人的末端执行器设置有状态检测传感器,所述状态检测传感器与半导体真空传输系统的处理器相连,用于检测LoadLock腔室内部的卡槽中是否有晶圆。本实用新型的获取方法仅需要增设状态检测传感器即可,无需复杂的硬件,可以最大限度地减少成本,便于推广应用。便于推广应用。便于推广应用。
技术研发人员:董怀宝 高飞翔 刘锐
受保护的技术使用者:上海广川科技有限公司
技术研发日:2022.01.28
技术公布日:2022/7/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。