显示装置及其驱动方法
1.本技术要求于2020年12月28日在韩国知识产权局提交的第10-2020-0185159号韩国专利申请的优先权,该韩国专利申请的内容通过引用全部包含于此。
技术领域
2.本公开的实施例涉及一种显示装置及其驱动方法,更具体地,涉及可以防止显示面板中可能发生的显示质量劣化的显示装置及其驱动方法。
背景技术:
3.显示装置向用户显示信息。显示装置的示例包括液晶显示装置、有机发光显示装置等。
4.显示装置典型地包括显示图像的像素单元和感测用户的输入的感测单元。感测单元可以与像素单元叠置。
5.除了触摸之外,用户的输入可以由诸如有源笔的电子装置提供。显示装置周期地发送上行链路信号以与有源笔通信。
6.然而,上行链路信号会引起对在显示装置上显示图像的信号的干扰,因此,显示面板的质量会劣化。
技术实现要素:
7.实施例提供了可以防止由于上行链路信号的发送而导致的显示质量劣化的显示装置及其驱动方法。
8.根据本公开的实施例,提供了一种显示装置,该显示装置包括:显示单元,在多个帧期间显示图像;以及传感器单元,与显示单元叠置,其中,传感器单元包括多个传感器。在多个帧中的第n帧的第一时段期间,多个传感器发送第一信号,其中,n是正整数。在第n帧的第二时段期间,多个传感器发送第二信号。在多个帧中的第n 1帧的第三时段期间,多个传感器发送第三信号。在第n 1帧的第四时段期间,多个传感器发送第四信号。第一信号和第三信号具有彼此相反的相位。
9.第一信号可以是第n上行链路信号,并且第二信号可以是第n-1反相信号。第三信号可以是第n反相信号,并且第四信号可以是第n 1上行链路信号。
10.当第i水平同步信号在第n帧中被接收时,第一时段可以开始,其中,i是正整数。当第i水平同步信号在第n 1帧中被接收时,第三时段可以开始。当第j水平同步信号在第n帧中被接收时,第二时段可以开始,其中,j是大于i的正整数。当第j水平同步信号在第n 1帧中被接收时,第四时段可以开始。
11.多个传感器中的至少一些可以在第一时段与第二时段之间的第五时段期间接收关于第一信号的确认信号,在第一时段与第二时段之间的第六时段期间接收关于第一信号的位置信号,并且在第一时段与第二时段之间的第七时段期间接收关于第一信号的数据信号。第六时段可以紧跟在第五时段之后,并且第七时段可以紧跟在第六时段之后。
12.多个传感器中的至少一些可以在第四时段之后的第八时段期间接收关于第四信号的确认信号,在第四时段之后的第九时段期间接收关于第四信号的位置信号,并且在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以紧跟在第八时段之后,并且第十时段可以紧跟在第九时段之后。
13.多个传感器中的至少一些可以在第一时段与第二时段之间的第五时段期间接收关于第一信号的确认信号,在第二时段之后的第六时段期间接收关于第一信号的位置信号,并且在第二时段之后的第七时段期间接收关于第一信号的数据信号。第七时段可以紧跟在第六时段之后。
14.多个传感器中的至少一些可以在第四时段之后的第八时段期间接收关于第四信号的确认信号,在第四时段之后的第九时段期间接收关于第四信号的位置信号,并且在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以紧跟在第八时段之后,并且第十时段可以紧跟在第九时段之后。
15.多个传感器中的至少一些可以在第二时段之后的第五时段期间接收关于第一信号的确认信号,在第二时段之后的第六时段期间接收关于第一信号的位置信号,并且在第二时段之后的第七时段期间接收关于第一信号的数据信号。第六时段可以紧跟在第五时段之后,并且第七时段可以紧跟在第六时段之后。
16.多个传感器中的至少一些可以在第四时段之后的第八时段期间接收关于第四信号的确认信号,在第四时段之后的第九时段期间接收关于第四信号的位置信号,并且在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以在第八时段之后,并且第十时段可以在第九时段之后。
17.多个传感器中的至少一些可以在第一时段与第二时段之间接收关于第一信号的位置信号,并且在第四时段之后接收关于第四信号的位置信号。
18.根据本公开的实施例,提供了一种用于驱动显示装置的方法,该方法包括:由传感器单元在多个帧中的第n帧的第一时段期间发送第一信号,在多个帧中由显示单元显示图像;由传感器单元在第n帧的第二时段期间发送第二信号;由传感器单元在多个帧中的第n 1帧的第三时段期间发送第三信号;以及由传感器单元在第n 1帧的第四时段期间发送第四信号。第一信号和第三信号具有彼此相反的相位。
19.第一信号可以是第n上行链路信号,并且第二信号可以是第n-1反相信号。第三信号可以是第n反相信号,并且第四信号可以是第n 1上行链路信号。
20.当第i水平同步信号在第n帧中被接收时,第一时段可以开始,其中,i是正整数。当第i水平同步信号在第n 1帧中被接收时,第三时段可以开始。当第j水平同步信号在第n帧中被接收时,第二时段可以开始,其中,j是大于i的正整数。当第j水平同步信号在第n 1帧中被接收时,第四时段可以开始。
21.在第n帧的第一时段期间发送第一信号的步骤还可以包括:在第一时段与第二时段之间的第五时段期间接收关于第一信号的确认信号;在第一时段与第二时段之间的第六时段期间接收关于第一信号的位置信号;以及在第一时段与第二时段之间的第七时段期间接收关于第一信号的数据信号。第六时段可以紧跟在第五时段之后,并且第七时段可以紧跟在第六时段之后。
22.在第n 1帧的第四时段期间发送第四信号的步骤还可以包括:在第四时段之后的
第八时段期间接收关于第四信号的确认信号;在第四时段之后的第九时段期间接收关于第四信号的位置信号;以及在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以紧跟在第八时段之后,并且第十时段可以紧跟在第九时段之后。
23.在第n帧的第一时段期间发送第一信号的步骤还可以包括在第一时段与第二时段之间的第五时段期间接收关于第一信号的确收信号。在第n帧的第二时段期间发送第二信号的步骤还可以包括:在第二时段之后的第六时段期间接收关于第一信号的位置信号;以及在第二时段之后的第七时段期间接收关于第一信号的数据信号。第七时段可以紧跟在第六时段之后。
24.在第n 1帧的第四时段期间发送第四信号的步骤还可以包括:在第四时段之后的第八时段期间接收关于第四信号的确认信号;在第四时段之后的第九时段期间接收关于第四信号的位置信号;以及在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以紧跟在第八时段之后,并且第十时段可以紧跟在第九时段之后。
25.在第n帧的第二时段期间发送第二信号的步骤还可以包括:在第二时段之后的第五时段期间接收关于第一信号的确认信号;在第二时段之后的第六时段期间接收关于第一信号的位置信号;以及在第二时段之后的第七时段期间接收关于第一信号的数据信号。第六时段可以紧跟在第五时段之后,并且第七时段可以紧跟在第六时段之后。
26.在第n 1帧的第四时段期间发送第四信号的步骤还可以包括:在第四时段之后的第八时段期间接收关于第四信号的确认信号;在第四时段之后的第九时段期间接收关于第四信号的位置信号;以及在第四时段之后的第十时段期间接收关于第四信号的数据信号。第九时段可以紧跟在第八时段之后,并且第十时段可以紧跟在第九时段之后。
27.在第n帧的第一时段期间发送第一信号的步骤还可以包括在第一时段与第二时段之间接收关于第一信号的位置信号。在第n 1帧的第四时段期间发送第四信号的步骤还可以包括在第四时段之后接收关于第四信号的位置信号。
附图说明
28.图1示出了根据本公开的实施例的显示装置。
29.图2示出了根据本公开的实施例的显示单元和显示驱动器。
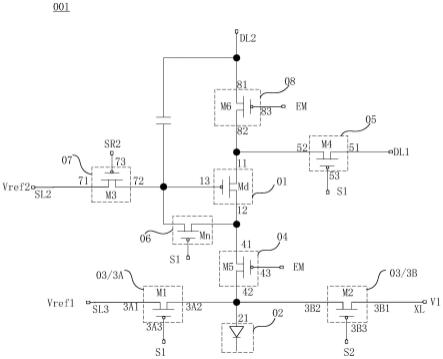
30.图3是根据本公开的实施例的像素的电路图。
31.图4示出了根据本公开的实施例的包括在传感器单元中的第一传感器和第二传感器。
32.图5示出了根据本公开的实施例的第一对象的感测时段和第二对象的感测时段。
33.图6示出了根据本公开的实施例的用于感测第一对象的方法。
34.图7示出了根据本公开的实施例的用于感测第二对象的方法。
35.图8示出了根据本公开的实施例的多个传感器。
36.图9a示出了根据本公开的实施例的用于在第n帧中感测第一对象的方法。
37.图9b示出了根据本公开的实施例的用于在第n 1帧中感测第一对象的方法。
38.图10示出了根据本公开的实施例的上行链路信号和反相信号的转变方向。
39.图11a示出了根据本公开的实施例的用于通过在第n帧中使用不同协议来感测第一对象的方法。
40.图11b示出了根据本公开的实施例的用于通过在第n 1帧中使用不同协议来感测第一对象的方法。
41.图12a示出了根据本公开的另一实施例的第一对象的协议在第n帧中不同的情况。
42.图12b示出了根据本公开的另一实施例的第一对象的协议在第n 1帧中不同的情况。
43.图13a示出了根据本公开的另一实施例的用于通过在第n帧中使用不同协议来感测第一对象的方法。
44.图13b示出了根据本公开的另一实施例的用于通过在第n 1帧中使用不同协议来感测第一对象的方法。
45.图14a示出了根据本公开的另一实施例的用于在第n帧中感测第一对象的方法。
46.图14b示出了根据本公开的另一实施例的用于在第n 1帧中感测第一对象的方法。
具体实施方式
47.在下文中,将参照附图详细地描述实施例。通过参照下面连同附图详细地描述的实施例,本公开的实施例的效果和特性以及实现效果和特性的方法将是清楚的。然而,本公开的实施例不限于这里公开的实施例,而是可以以各种形式实现。实施例仅通过示例的方式提供,使得本领域普通技术人员可以完全理解本公开中的特征及其范围。因此,本公开的实施例可以由所附权利要求的范围限定。贯穿说明书,同样的附图标记通常可以表示同样的元件。
48.在下文中,将参照图1描述根据本公开的实施例的显示装置1。
49.图1示出了根据本公开的实施例的显示装置1。
50.根据本公开的实施例的显示装置1包括面板10和驱动电路20。
51.面板10包括显示单元110和传感器单元120。
52.显示单元110包括显示基底111和形成在显示基底111上的多个像素pxl。多个像素pxl设置在显示基底111的显示区域da中。多个像素pxl在面板10上显示图像。
53.显示基底111包括其中显示图像的显示区域da和围绕显示区域da的非显示区域nda。显示区域da设置在显示单元110的中心区域中,并且非显示区域nda设置在显示单元110的边缘区域中并围绕显示区域da。
54.另外,显示基底111可以是刚性基底或柔性基底,并且显示基底111的材料或性质不被特别地限制。例如,在实施例中,显示基底111是由玻璃或钢化玻璃制成的刚性基底,或者在另一实施例中,显示基底111是构造有由塑料或金属制成的薄膜的柔性基底。
55.多条扫描线sl和多条数据线dl设置在显示区域da中,并且多个像素pxl连接到多条扫描线sl和多条数据线dl。
56.通过从多条扫描线sl中的一条接收的导通电平扫描信号来选择像素pxl。另外,选择的像素pxl被供应有从多条数据线dl中的一条接收的数据电压。选择的像素pxl发射具有与供应的数据电压对应的亮度的光。因此,在显示区域da中显示与数据电压对应的图像。
57.根据实施例,连接到显示区域da的多个像素pxl的各种类型的线和/或内置电路设置在非显示区域nda中。
58.具体地,在实施例中,将各种电源信号和各种控制信号供应到显示区域da的多条
线设置在非显示区域nda中。另外,扫描驱动器等还设置在非显示区域nda中。
59.在本公开中,显示单元110的类型不被特别地限制。例如,在一些实施例中,显示单元110是自发光显示面板,诸如使用有机发光二极管作为发光元件的有机发光显示面板(oled面板)、使用纳米至微米尺寸发光二极管作为发光元件的纳米级/微米级发光二极管显示面板(纳米/微米led面板),但不限于此,诸如使用有机发光二极管和量子点的量子点有机发光显示面板(qd oled面板),或者使用纳米至微米尺寸发光二极管和量子点的纳米级/微米级量子点led显示面板(qd纳米/微米led面板)。可选地,在一些实施例中,显示单元110是诸如液晶显示面板(lcd面板)、电泳显示面板(epd面板)或电润湿显示面板(ewd面板)的非自发光显示面板。当显示单元110被实现为非自发光显示面板时,显示装置1另外包括诸如背光单元的光源。
60.传感器单元120感测施加到显示单元110的触摸、压力、指纹、悬停、有源笔等。在实施例中,传感器单元120与显示单元110叠置。
61.具体地,在实施例中,当显示单元110和传感器单元120彼此分开制造时,显示单元110和传感器单元120设置和/或结合为在至少一个区域中彼此叠置。
62.例如,在实施例中,传感器单元120直接形成在至少一个基底(诸如显示面板的上基底和/或下基底,或薄膜封装层,或另一绝缘层或构成显示单元110的各种类型的功能层中的一个)上。
63.然而,尽管在图1中示出了传感器单元120设置在显示单元110的前表面(诸如其上显示图像的上表面)上的情况,但是在其他实施例中,传感器单元120的位置不限于此。
64.例如,在实施例中,传感器单元120设置在显示单元110的后表面上或两个表面上。可选地,在实施例中,传感器单元120设置在显示单元110的至少一个边缘区域中。
65.在实施例中,传感器单元120包括传感器基底121和形成在传感器基底121上的多个传感器tx和rx。多个传感器tx和rx设置在传感器基底121上的感测区域sa中。
66.在实施例中,传感器基底121包括感测区域sa和在感测区域sa的外围处的外围区域nsa。
67.传感器基底121可以是刚性或柔性基底。在实施例中,传感器基底121包括至少一个绝缘层。另外,传感器基底121可以是透明或半透明的透光基底。然而,在其他实施例中,传感器基底121的材料和性质不限于此。
68.感测区域sa包括传感器的可以对用户输入作出反应的有效区域。为了对用户的输入作出反应,感测用户的输入等的传感器tx和rx设置在感测区域sa中。
69.在下文中,tx被称为第一传感器,rx被称为第二传感器。
70.具体地,在实施例中,第一传感器tx在第一方向dr1上延伸,并且第二传感器rx设置为在与第一方向dr1交叉的第二方向dr2上延伸。第一方向dr1和第二方向dr2彼此正交。
71.具体地,在实施例中,第一传感器tx包括彼此连接的具有相对宽的区域的第一单元和具有相对窄的区域的第一桥接器。
72.尽管图1示出了第一单元具有菱形形状的实施例,但是实施例不限于此,在其他实施例中,第一单元可以具有各种其他形状,诸如圆形形状、矩形形状、三角形形状或网格形状等。
73.另外,在实施例中,第二传感器rx包括彼此连接的具有相对宽的区域的第二单元
和具有相对窄的区域的第二桥接器。
74.尽管图1示出了第二单元具有与第一单元一样的菱形形状的实施例,但是实施例不限于此,在其他实施例中,第二单元可以具有各种其他形状,诸如圆形形状、矩形形状、三角形形状或网格形状等。
75.另外,在实施例中,第一传感器tx和第二传感器rx中的每个包括金属、透明导电材料和各种其他导电材料中的至少一种以是导电的。
76.具体地,在实施例中,第一传感器tx和第二传感器rx包括诸如金(au)、银(ag)、铝(al)、钼(mo)、铬(cr)、钛(ti)、镍(ni)、钕(nd)、铜(cu)或铂(pt)等的各种金属中的至少一种或其合金。第一传感器tx和第二传感器rx被构造为网格形状。
77.另外,在实施例中,第一传感器tx和第二传感器rx包括诸如银纳米线(agnw)、氧化铟锡(ito)、氧化铟锌(izo)、氧化铟镓锌(igzo)、氧化锑锌(azo)、氧化铟锡锌(itzo)、氧化锌(zno)、氧化锡(sno2)、碳纳米管或石墨烯等的各种透明导电材料中的至少一种。
78.在实施例中,感测区域sa与显示区域da中的至少一个区域叠置。
79.具体地,在实施例中,感测区域sa与显示区域da对应,例如是与显示区域da叠置的区域,外围区域nsa与非显示区域nda对应,例如是与非显示区域nda叠置的区域。当向显示区域da提供触摸输入等时,通过传感器单元120检测触摸输入。
80.在实施例中,将传感器tx和rx电连接到传感器驱动器220的传感器线设置在传感器单元120的外围区域nsa中。
81.在实施例中,驱动电路20包括显示驱动器210和传感器驱动器220。显示驱动器210和传感器驱动器220可以被构造为彼此分开的集成芯片(ic)。可选地,在实施例中,显示驱动器210的至少一部分和传感器驱动器220的至少一部分可以一起集成在一个ic中。
82.在实施例中,显示驱动器210连接到显示单元110以驱动显示单元110。具体地,显示驱动器210电连接到显示单元110以驱动像素pxl。
83.在实施例中,传感器驱动器220连接到传感器单元120以驱动传感器单元120。具体地,传感器驱动器220电连接到传感器单元120以驱动传感器tx和rx。
84.在下文中,将参照图2描述根据本公开的实施例的显示单元110和显示驱动器210。
85.图2示出了根据本公开的实施例的显示单元110和显示驱动器210。
86.显示驱动器210包括时序控制器11和数据驱动器12。
87.在实施例中,时序控制器11从处理器接收针对每个帧的灰度和控制信号。处理器可以与图形处理单元(gpu)、中央处理单元(cpu)或应用处理器(ap)等对应。控制信号包括垂直同步信号、水平同步信号、数据使能信号等。
88.在实施例中,垂直同步信号的每个周期与每个显示帧周期对应。具体地,当垂直同步信号具有逻辑高电平时,垂直同步信号指示对应的显示帧周期的有效时段。当垂直同步信号具有逻辑低电平时,垂直同步信号指示对应的显示帧周期的空白时段。
89.在实施例中,水平同步信号的每个周期与每个水平时段对应。
90.在实施例中,当从处理器接收到灰度时,数据使能信号具有诸如逻辑高电平的使能电平,并且当未接收到灰度时,数据使能信号具有诸如逻辑低电平的禁用电平。
91.另外,在实施例中,时序控制器11渲染灰度以与显示装置1的规格对应。
92.在实施例中,处理器提供关于每个单位点的红色灰度、绿色灰度和蓝色灰度。时序
控制器11渲染与像素单元14中的像素pxij的布置对应的灰度,并且将渲染的灰度提供到数据驱动器12。
93.另外,在实施例中,时序控制器11将数据控制信号提供到数据驱动器12。时序控制器11还将扫描控制信号提供到扫描驱动器13。
94.在实施例中,数据驱动器12通过使用从时序控制器11接收的灰度和数据控制信号来产生待提供到数据线dl1、dl2、dl3、dl4、
……
的数据信号。
95.在实施例中,显示单元110包括扫描驱动器13和像素单元14。
96.在实施例中,扫描驱动器13通过使用从时序控制器11接收的时钟信号、扫描开始信号等来产生具有待提供到扫描线sl1、sl2、
……
的导通电平的脉冲的扫描信号。扫描驱动器13顺序地将产生的扫描信号供应到扫描线sl1、sl2、
……
。
97.具体地,在实施例中,扫描驱动器13在与水平同步信号的周期对应的时段中将导通电平扫描信号供应到扫描线。
98.在实施例中,扫描驱动器13包括被配置为移位寄存器的多个扫描级。扫描驱动器13通过在时钟信号的控制下将扫描开始信号以导通电平脉冲的形式顺序地发送到下一扫描级来产生扫描信号。
99.在实施例中,像素单元14包括像素pxij。像素pxij中的每个连接到对应的数据线和对应的扫描线。
100.具体地,在实施例中,像素pxij连接到第i扫描线和第j数据线。像素包括发射第一颜色光的子像素、发射第二颜色光的子像素和发射第三颜色光的子像素。第一颜色、第二颜色和第三颜色可以是不同的颜色。
101.具体地,在实施例中,第一颜色是红色、绿色和蓝色中的一种,第二颜色是红色、绿色和蓝色中的除了第一颜色之外的一种,并且第三颜色是红色、绿色和蓝色中的除了第一颜色和第二颜色之外的另一种。可选地,在其他实施例中,第一颜色至第三颜色是品红色、青色和黄色,而不是红色、绿色和蓝色。然而,为了便于描述,描述了第一颜色、第二颜色和第三颜色分别是红色、绿色和蓝色的实施例。
102.在下文中,将参照图3描述根据本公开的实施例的像素pxij。
103.图3是根据本公开的实施例的像素pxij的电路图。
104.在实施例中,像素pxij包括晶体管t1和t2、存储电容器cst和发光二极管ld。
105.在实施例中,晶体管t1的栅电极连接到存储电容器cst的第二电极,并且晶体管t1的第一电极连接到第一电源线elvddl。另外,晶体管t1的第二电极连接到发光二极管ld的阳极。在下文中,晶体管t1被称为驱动晶体管。
106.在实施例中,晶体管t2的栅电极连接到第i扫描线sli,并且晶体管t2的第一电极连接到第j数据线dlj。另外,晶体管t2的第二电极连接到存储电容器cst的第二电极。在下文中,晶体管t2被称为扫描晶体管。
107.在实施例中,晶体管t1和t2利用p型晶体管来实现,但是实施例不限于此,本领域技术人员可以通过使信号的相位反相来使用至少一个n型晶体管。
108.在实施例中,存储电容器cst的第一电极连接到第一电源线elvddl,并且存储电容器cst的第二电极连接到晶体管t1的栅电极。
109.在实施例中,发光二极管ld的阳极连接到晶体管t1的第二电极,并且发光二极管
ld的阴极连接到第二电源线elvssl。在发光二极管ld的发射时段期间,施加到第一电源线elvddl的第一电源电压比第二电源线elvssl的第二电源电压高。
110.在实施例中,当导通电平扫描信号被施加到第i扫描线sli时,晶体管t2导通。在第j数据线dlj中充电的数据电压被存储在存储电容器cst的第二电极中。晶体管t1传输与由存储电容器cst保持的栅源电压差对应的驱动电流。产生的驱动电流流过从第一电源线elvddl通过晶体管t1和发光二极管ld到第二电源线elvssl的路径。发光二极管ld发射具有与驱动电流的大小对应的亮度的光。
111.在下文中,将参照图4描述根据本公开的实施例的第一传感器tx1、tx2、tx3和tx4和第二传感器rx1、rx2、rx3和rx4。
112.图4示出了根据本公开的实施例的传感器单元120中的第一传感器tx1、tx2、tx3和tx4以及第二传感器rx1、rx2、rx3和rx4。
113.在实施例中,第一传感器tx1、tx2、tx3和tx4以及第二传感器rx1、rx2、rx3和rx4设置在传感器单元120的感测区域sa中。为了便于描述,假设四个第一传感器tx1、tx2、tx3和tx4设置在感测区域sa中,并且四个第二传感器rx1、rx2、rx3和rx4设置在感测区域sa中。然而,实施例不限于此,在其他实施例中,第一传感器和第二传感器的数量可以改变。
114.第一传感器tx1至tx4以及第二传感器rx1至rx4的描述与图1中示出的第一传感器tx和第二传感器rx的描述相同,因此,将省略重复描述。
115.在下文中,将参照图5至图7描述根据本公开的实施例的用于感测第一对象obj1的方法和用于感测第二对象obj2的方法。
116.图5示出了根据本公开的实施例的一个帧周期中的第一对象obj1的感测时段和第二对象obj2的感测时段。
117.参照图5,在实施例中,示例性地示出了与垂直同步信号vsync的一个周期对应的一个帧周期t1至t7。帧周期是显示单元110的图像显示单元,即显示帧周期。
118.在实施例中,帧周期t1至t7包括第一对象感测时段t1至t5和第二对象感测时段t6至t7。
119.在实施例中,第一对象感测时段t1至t5用于感测第一对象obj1。
120.在实施例中,第一对象obj1可以是向/从传感器单元120发送/接收电磁信号的有源笔。第一对象obj1可以是从显示装置1可拆卸的。另外,第一对象obj1可以是与显示装置1分开的产品。
121.另外,在实施例中,第二对象感测时段t6至t7用于感测第二对象obj2。第二对象obj2是不向/从传感器单元120发送/接收任何电磁信号的无源器件。例如,第二对象obj2可以是用户的手指。
122.在实施例中,用于发送上行链路信号upl的时段t1到t2、用于发送确认信号ack的时段t2到t3、用于发送位置信号pos的时段t3到t4以及用于发送数据信号dat的时段t4到t5中的每个时段构成时隙。时隙是针对第一对象obj1和传感器单元120彼此通信而指定的时间单位。
123.在实施例中,在帧周期t1至t7中,上行链路信号upl与水平同步信号hsync同步。
124.具体地,在实施例中,在帧的t1时刻,当水平同步信号hsync被接收时,上行链路信号upl被发送。通过这样做,可以抵消以下将描述的由于上行链路信号upl而产生的噪声。这
将在下面详细描述。
125.在实施例中,在时段t1至t2期间,第一传感器tx1、tx2、tx3和tx4均发送上行链路信号upl。在时段t1至t2期间,第二传感器rx1至rx4不发送上行链路信号upl,以降低通道配置成本和功耗。然而,在其他实施例中,在时段t1至t2期间,第二传感器rx1至rx4也发送上行链路信号upl。
126.在下文中,为了便于描述,描述了仅第一传感器tx1、tx2、tx3和tx4发送上行链路信号upl的实施例。
127.在实施例中,由第一传感器tx1、tx2、tx3和tx4发送的上行链路信号upl可以干扰通过像素pxij的发光二极管ld的阴极的数据电压。因此,不适当的数据电压会被存储在对应的像素pxij中,因此会发生显示质量劣化。
128.在实施例中,在时段t2到t3期间,第一对象obj1发送与接收的上行链路信号upl对应的确认信号ack。确认信号ack指示第一对象obj1位于传感器单元120附近。
129.在实施例中,在时段t3至t4期间,第一对象obj1发送位置信号pos。位置信号pos具有比确认信号ack的强度强的强度,或者包括比确认信号ack的脉冲的数量大的数量的脉冲。位置信号pos指示第一对象obj1的位置。
130.在实施例中,在时段t4到t5期间,第一对象obj1发送数据信号dat。数据信号dat包括除了第一对象obj1的位置之外的信息(诸如按钮压力)。
131.图6示出了根据本公开的实施例的用于感测第一对象obj1的方法。
132.在实施例中,传感器驱动器220包括传感器接收器tsc。在第一对象感测时段t1至t5期间,传感器接收器tsc可以连接到第一传感器tx或第二传感器rx。
133.在实施例中,传感器接收器tsc包括传感器通道222、模数转换器224和处理器226。
134.在实施例中,传感器通道222被实现为积分器。电容器ca和开关swr彼此并联连接在运算放大器amp的第一输入端子in1和输出端子out1之间。
135.在实施例中,运算放大器amp的第一输入端子in1连接到对应的传感器tx或rx,并且运算放大器amp的第二输入端子in2连接到参考电源gnd。
136.具体地,在实施例中,第一输入端子in1是反相端子,并且第二输入端子in2是同相端子。另外,参考电源gnd是接地电压或具有特定幅值的电压。
137.在实施例中,在接收到第一对象obj1的发送信号ack、pos和dat之前开关swr接通,使得电容器ca的电荷可以被初始化。当接收到第一对象obj1的发送信号ack、pos和dat时,开关swr处于关断状态。
138.另外,在实施例中,传感器通道222产生与在第一输入端子in1和第二输入端子in2之间的电压差对应的输出信号。
139.具体地,在实施例中,传感器通道222放大并输出第一输入端子in1与第二输入端子in2之间的与预定增益对应的电压差。
140.在实施例中,模数转换器224连接到运算放大器amp的输出端子out1。模数转换器224将从传感器通道222接收的模拟信号转换为数字信号。
141.在实施例中,处理器226通过分析由模数转换器224转换的数字信号来检测用户输入。
142.另外,在实施例中,传感器tx和rx中的至少一些在时段t3至t4期间接收位置信号
pos。
143.具体地,在实施例中,可以通过使用连接到第一传感器tx1至tx4的传感器通道222来检测第一对象obj1在第一方向dr1上的位置。另外,可以通过使用连接到第二传感器rx1至rx4的传感器通道222来检测第二对象obj2在第二方向dr2上的位置。
144.在实施例中,当传感器通道222的数量充足时,可以同时检测第一对象obj1在第一方向dr1上的位置和第二对象obj2在第二方向dr2上的位置。另一方面,当传感器通道222的数量不充足时,可以在不同时段期间检测第一对象obj1在第一方向dr1上的位置和第二对象obj2在第二方向dr2上的位置。
145.另外,在实施例中,传感器tx和rx中的至少一些在时段t4至t5期间接收数据信号dat。
146.在实施例中,为了降低通道配置成本和功耗,仅第一传感器tx连接到传感器通道222以接收数据信号dat。可选地,在实施例中,仅第二传感器rx连接到传感器通道222以接收数据信号dat。在其他实施例中,第一传感器tx中的至少一些和第二传感器rx中的至少一些连接到传感器通道222以接收数据信号dat。
147.图7示出了根据本公开的实施例的用于感测第二对象obj2的方法。
148.在实施例中,第二对象obj2是不向/从传感器单元120发送/接收任何电磁信号的无源器件。例如,第二对象obj2可以是用户的手指。
149.在图7中,在实施例中,传感器驱动器220还包括传感器发送器tdc。在图5中示出的第二对象感测时段t6至t7期间,传感器发送器tdc连接到第一传感器tx。另外,传感器接收器tsc连接到第二传感器rx。
150.在实施例中,传感器发送器tdc将感测信号顺序地供应到第一传感器tx1至tx4。
151.具体地,在实施例中,感测信号被供应到第一传感器tx1两次,并且包括上升转变和下降转变,感测信号被供应到第一传感器tx2两次,感测信号被供应到第一传感器tx3两次,并且感测信号被供应到第一传感器tx4两次。在一些实施例中,多于两个的感测信号被供应到第一传感器tx1至tx4中的每个。
152.在实施例中,传感器接收器tsc包括连接到多个第二传感器rx的多个传感器通道222。每个传感器通道222接收与来自于对应的第二传感器的感测信号对应的采样信号。
153.具体地,在实施例中,连接到第二传感器rx1至rx4的传感器通道222独立地接收与施加到第一传感器tx1的上升转变对应的采样信号。另外,连接到第二传感器rx1到rx4的传感器通道222独立地接收与施加到第一传感器tx1的下降转变对应的采样信号。
154.在实施例中,在感测区域sa中,第一传感器tx1至tx4与第二传感器rx1至rx4之间的互电容基于第二对象obj2的位置而彼此不同。因此,由传感器通道222接收的采样信号彼此不同。从采样信号之间的差异来检测第二对象obj2的位置。
155.在下文中,将参照图8至图10描述根据本公开的实施例的用于在多个帧中感测第一对象的方法。
156.图8示出了根据本公开的实施例的多个传感器tx和rx。
157.在下文中,为了便于描述,假设第一传感器tx发送上行链路信号,并且第二传感器rx不发送上行链路信号。然而,在一些实施例中,第二传感器rx发送上行链路信号,并且第一传感器tx不发送上行链路信号。另外,在其他实施例中,第一传感器tx中的至少一些和第
二传感器rx中的至少一些发送上行链路信号。
158.图9a示出了根据本公开的实施例的用于在第n(n是正整数)帧n-frame中感测第一对象obj1的方法。
159.参照图9a,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n上行链路信号upl_n,其中,n可以是与n相同或不同的正整数。
160.在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第一对象obj1接收第n上行链路信号upl_n。响应于第n上行链路信号upl_n,第一对象obj1在下一个时隙中发送确认信号ack。
161.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第一时段t1a至t2a与第五时段t5a至t6a之间的第二时段t2a至t3a期间接收关于第n上行链路信号upl_n的确认信号ack。
162.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4在第一时段t1a至t2a与第五时段t5a至t6a之间的第三时段t3a至t4a期间接收位置信号pos。
163.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第一时段t1a至t2a与第五时段t5a至t6a之间的第四时段t4a至t5a期间接收数据信号dat。
164.在实施例中,在第n帧n-frame的第五时段t5a至t6a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n-1帧n-1-frame的第n-1反相信号iupl_n-1。
165.图9b示出了根据本公开的实施例的用于在第n 1帧n 1-frame中感测第一对象obj1的方法。
166.参照图9b,在实施例中,在第n 1帧n 1-frame的t15a时刻,第n反相信号iupl_n与第i水平同步信号hsync同步。另外,在t19a,第n 1上行链路信号upl_n 1与第j水平同步信号hsync同步。参照图9b,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n反相信号iupl_n。
167.在实施例中,在第十五时段t15a至t16a期间供应到第一传感器tx1、tx2、tx3和tx4的第n反相信号iupl_n具有通过使在第n帧n-frame的第一时段t1a至t2a期间供应到第一传感器tx1、tx2、tx3和tx4的第n上行链路信号upl_n的相位反相而获得的相位。
168.由在图9a中示出的第n帧n-frame的第一时段t1a至t2a期间供应到第一传感器tx1、tx2、tx3和tx4的第n上行链路信号upl_n产生的噪声被在图9b中示出的第十五时段t15a至t16a期间供应到第一传感器tx1、tx2、tx3和tx4的第n反相信号iupl_n抵消。
169.另外,在实施例中,在图9a中示出的第n帧n-frame的第一时段t1a至t2a与在图9a中示出的第n帧n-frame中的第i水平同步信号hsync同步,并且在图9b中示出的第n 1帧n 1-frame的第十五时段t15a至t16a与第n 1帧n 1-frame中的第i水平同步信号hsync同步。第一时段t1a至t2a和第十五时段t15a至t16a以帧为单位同时发生,因此,可以更稳定地抵消噪声。
170.同时,在实施例中,由于在第十五时段期间供应反相信号,所以第一对象obj1不接收具有反相相位的信号。因此,第一对象obj1在第n 1帧n 1-frame的第十五时段t15a至t16a期间不能接收第n反相信号iupl_n。
171.在实施例中,在第n 1帧n 1-frame的第十九时段t19a至t20a期间,传感器单元120
和第一传感器tx1、tx2、tx3和tx4发送第n 1上行链路信号upl_n 1。
172.在实施例中,在第n 1帧n 1-frame的第十九时段t19a至t20a期间,第一对象obj1接收第n 1上行链路信号upl_n 1。响应于第n 1上行链路信号upl_n 1,第一对象obj1在下一个时隙中发送确认信号ack。
173.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第二十时段t20a至t21a期间接收关于第n 1上行链路信号upl_n 1的确认信号ack。
174.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第二十一时段t21a至t22a期间接收位置信号pos。
175.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第二十二时段t22a至t23a期间接收数据信号dat。
176.另外,在实施例中,反相信号在第n 2帧期间与第十九时段t19a至t20a同步,即,与第n 2帧的第j水平同步信号hsync同步。在第n 2帧期间供应的反相信号抵消了在第n l帧期间在第十九时段t19a至t20a中供应的上行链路信号的噪声。
177.如上所述,在本公开的实施例中,以帧为单位交替地供应上行链路信号和反相信号,因此可以降低平均噪声。
178.具体地,在实施例中,由在图9a中示出的第n帧n-frame的第一时段t1a至t2a中发送的第n上行链路信号upl_n产生的噪声被在第n 1帧n 1-frame的第十五时段t15a至t16a中发送的第n反相信号iupl_n抵消。
179.另外,在实施例中,参照图9a和图9b,在第n帧n-frame的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。另外,在第n 1帧n 1-frame的t15a时刻,当水平同步信号hsync被接收时,第n反相信号iupl_1被发送。因此,由第n上行链路信号upl_n产生的噪声被第n反相信号iupl_1更有效地抵消。此外,在实施例中,参照图9a和图9b,在第n帧n-frame的时段t6a至t7a、t7a至t8a、t8a至t9a、t9a至t10a、t10a至t11a、t11a至t12a、t12a至t13a、t13a至t14a、t14a至t15a期间和在第n 1帧n 1-frame的时段t23a至t24a、t24a至t25a、t25a至t26a、t26a至t27a期间,第一对象obj1和第一传感器tx1至tx4可以不发送或接收信号。
180.图10示出了根据本公开的实施例的上行链路信号和反相信号的转变方向。
181.参照图10,在实施例中,反相信号iupl的转变方向与对应的上行链路信号upl的转变方向相反。
182.具体地,在实施例中,当上行链路信号upl具有上升转变时,反相信号iupl具有下降转变。相反,当上行链路信号upl具有下降转变时,反相信号iupl具有上升转变。
183.因此,在图9a中示出的第n帧n-frame的第一时段t1a至t2a期间,由第n上行链路信号upl_n引起的噪声被在第n帧n-frame的第五时段t5a至t6a期间供应的第n-1反相信号iupl_n-1抵消。
184.另外,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第n上行链路信号upl_n的噪声被在第n 1帧n 1-frame的第十五时段t15a至t16a中产生的第n反相信号iupl_n的噪声抵消。因此,可以防止由上行链路信号引起的显示质量劣化。
185.在下文中,将参照图11a和图11b描述根据本公开的实施例改变第一对象obj1的协议的情况。
186.图11a示出了根据本公开的实施例的用于通过在第n帧n-frame中使用不同协议来感测第一对象obj1的方法。图11b示出了根据本公开的实施例的用于通过在第n 1帧n 1-frame中使用不同协议来感测第一对象obj1的方法。
187.图8至图10中示出的上述实施例假设第一对象obj1的协议不改变的情况。
188.参照图9a和图9b,在实施例中,当使用现有协议时,位置信号pos在第n帧n-frame的第三时段t3a至t4a中被发送。另外,位置信号pos在第n 1帧n 1-frame的第二十一时段t21a至t22a中被发送。
189.即,在实施例中,其中在第n帧n-frame中第一对象obj1的位置被感测的第三时段t3a至t4a和其中在第n 1帧n 1-frame中第一对象obj1的位置被感测的第二十一时段t21a至t22a具有四个时隙的差。
190.然而,图11a和图11b示出了实施例,在实施例中,第一对象obj1的协议被修改,使得在多个帧frame的每个中,在确认信号ack的发送时段与位置信号pos的发送时段之间设置两个时隙。
191.具体地,在实施例中,在图11a中,在第n帧n-frame的t1a时刻,第n上行链路信号upl_n与水平同步信号hsync同步。另外,在第n帧n-frame的t3a时刻,第n-1反相信号iupl_n-1与水平同步信号hsync同步。
192.参照图11a,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n上行链路信号upl_n。
193.在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第一对象obj1接收第n上行链路信号upl_n。响应于第n上行链路信号upl_n,第一对象obj1在下一个时隙中发送确认信号ack。
194.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第一时段t1a至t2a与第三时段t3a至t4a之间的第二时段t2a至t3a期间接收关于第n上行链路信号upl_n的确认信号ack。
195.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4在第五时段t5a至t6a期间接收位置信号pos。另外,第一传感器tx1、tx2、tx3和tx4还在第六时段t6a至t7a期间接收数据信号dat。
196.在实施例中,在第n帧n-frame的第三时段t3a至t4a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送关于第n-1帧n-1-frame的第n-1上行链路信号upl_n-1的第n-1反相信号iupl_n-1。
197.在实施例中,由在第n帧n-frame的第一时段t1a至t2a期间发送的第n上行链路信号upl_n引起的噪声分量可以被在第n帧n-frame的第三时段t3a至t4a期间发送的第n-1反相信号iupl_n-1抵消。
198.在图11a中,在实施例中,在第n帧n-frame的t1a时刻,第n上行链路信号upl_n与水平同步信号hsync同步,并且在第n帧n-frame的t3a时刻,第n-1反相信号iupl_n-1与水平同步信号hsync同步。因此,由在第n帧n-frame的第一时段t1a至t2a期间发送的第n上行链路信号upl_n引起的噪声分量可以被在第n帧n-frame的第三时段t3a至t4a期间发送的第n-1反相信号iupl_n-1更有效地抵消。
199.参照图11b,在实施例中,在第n 1帧n 1-frame的t15a时刻,第n反相信号iupl_n与
水平同步信号hsync同步。另外,在第n 1帧n 1-frame的t17a时刻,第n 1上行链路信号upl_n 1与水平同步信号hsync同步。
200.另外,在实施例中,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n反相信号iupl_n。
201.在实施例中,由在第n 1帧n 1-frame的第十五时段t15a至t16a中供应的第n反相信号iupl_n引起的噪声分量被在第n 1帧n 1-frame的第十七时段t17a至t18a中供应的第n 1上行链路信号upl_n 1抵消。
202.另外,在实施例中,第一对象obj1不接收具有反相相位的信号。因此,第一对象obj1在第n 1帧n 1-frame的第十五时段t15a至t16a期间不能接收第n反相信号iupl_n。
203.在实施例中,在第n 1帧n 1-frame的第十七时段t17a至t18a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n 1上行链路信号upl_n 1。
204.在实施例中,第一对象obj1在第n 1帧n 1-frame的第十七时段t17a至t18a期间接收第n 1上行链路信号upl_n 1。响应于第n 1上行链路信号upl_n 1,第一对象obj1在下一个时隙中发送确认信号ack。
205.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第十八时段t18a至t19a期间接收关于第n 1上行链路信号upl_n 1的确认信号ack。
206.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第二十二时段t22a至t23a期间接收数据信号dat。
207.因此,在实施例中,其中在第n帧n-frame中第一对象obj1的位置被感测的第五时段t5a至t6a和其中在第n 1帧n 1-frame中第一对象obj1的位置被感测的第二十一时段t21a至t22a具有两个时隙的差。
208.因此,在实施例中,第一对象obj1的协议被修改,使得在多个帧frame中的每个中,在确认信号ack的发送时段与位置信号pos的发送时段之间设置两个时隙。因此,可以减小其中在第n帧n-frame中感测第一对象obj1的位置的第五时段t5a至t6a与其中在第n 1帧n 1-frame中感测第一对象obj1的位置的第二十一时段t21a至t22a之间的时隙差。
209.另外,在实施例中,与第一对象obj1对应,由在第n帧n-frame的第一时段t1a至t2a中产生的第n上行链路信号up1_n引起的噪声分量被由在第n 1帧n 1-frame的第十五时段t15a至t16a中产生的第n反相信号iupl_n引起的噪声分量抵消。因此,可以防止由上行链路信号引起的显示质量劣化。
210.另外,在实施例中,与图9a和图9b一样,上行链路信号被接收的时间和水平同步信号被接收的时间彼此对应。
211.具体地,在实施例中,在第n帧n-frame的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。另外,在第n 1帧n 1-frame的t15a时刻,当水平同步信号hsync被接收时,第n反相信号iupl_n被发送。因此,由第n上行链路信号upl_n产生的噪声被第n反相信号iupl_n更有效地抵消。
212.图12a示出了根据本公开的另一实施例的第一对象obj1的协议在第n帧n-frame中不同的情况。图12b示出了根据本公开的另一实施例的第一对象obj1的协议在第n 1帧n 1-frame中不同的情况。
213.参照图12a和图12b,在实施例中,第一对象obj1的关于第n帧n-frame的第n上行链
路信号upl_n的协议与第一对象obj1的关于第n 1帧n 1-frame的第n 1上行链路信号upl_n 1的协议不同。
214.参照图11a,在实施例中,在第n帧n-frame的第二时段t2a至t3a中,确认信号ack被发送。另外,在第五时段t5a到t6a中,位置信号pos被发送。此外,在第六时段t6a至t7a中,数据信号dat被发送。
215.参照图11b,在实施例中,在第n 1帧n 1-frame的第十八时段t18a至t19a中,确认信号ack被发送。另外,在第二十一时段t21a至t22a中,位置信号pos被发送。此外,在第二十二时段t22a至t23a中,数据信号dat被发送。
216.即,在图11a和图11b中示出的实施例中,在第n帧n-frame和第n 1帧n 1-frame中,第一对象obj1发送确认信号ack的时间和第一对象obj1的位置信号pos被发送的时间具有两个时隙的差。
217.然而,根据本公开的实施例,图12a和图12b示出了在第n 1帧n 1-frame中第一对象obj1的协议被修改使得位置信号pos的发送时段的时隙是确认信号ack的发送时段之后的下一个时隙的情况。
218.参照图12a,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n上行链路信号upl_n。
219.在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第一对象obj1接收第n上行链路信号upl_n。响应于第n上行链路信号upl_n,第一对象obj1在下一个时隙中发送确认信号ack。
220.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第一时段t1a至t2a与第三时段t3a至t4a之间的第二时段t2a至t3a期间接收关于第n上行链路信号upl_n的确认信号ack。
221.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4在第五时段t5a至t6a期间接收位置信号pos,并且第一传感器tx1、tx2、tx3和tx4还在第六时段t6a至t7a期间接收数据信号dat。
222.在实施例中,在第n帧n-frame的第三时段t3a至t4a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送关于第n-1帧n-1-frame的第n-1上行链路信号upl_n-1的第n-1反相信号iupl_n-1。
223.与图9a和图9b一样,在实施例中,由在第n帧n-frame的第一时段t1a至t2a期间发送的第n上行链路信号upl_n引起的噪声分量被在第三时段t3a至t4a期间发送的第n-1反相信号iupl_n-1抵消。
224.另外,在实施例中,与图9a和图9b一样,在第n帧的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。此外,在第n帧n-frame的t3a时刻,当水平同步信号hsync被接收时,第n-1反相信号iupl_n-1被发送。因此,由第n上行链路信号upl_n产生的噪声被第n-1反相信号iupl_n-1更有效地抵消。
225.参照图12b,在实施例中,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n反相信号iupl_n。
226.在实施例中,第一对象obj1不接收具有反相相位的信号。因此,第一对象obj1在第n 1帧n 1-frame的第十五时段t15a至t16a期间不能接收第n反相信号iupl_n。
227.在实施例中,在第n 1帧n 1-frame的第十七时段t17a至t18a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n 1上行链路信号upl_n 1。
228.在实施例中,在第n 1帧n 1-frame的第十五时段t15a至t16a期间发送的第n反相信号iupl_n被在第n 1帧n 1-frame的第十七时段t17a至t18a期间发送的第n 1上行链路信号upl_n 1抵消。
229.另外,在实施例中,在第n 1帧n 1-frame的第十七时段t17a至t18a期间,第一对象obj1接收第n 1上行链路信号upl_n 1。响应于第n 1上行链路信号upl_n 1,第一对象obj1在下一个时隙中发送确认信号ack。
230.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第十八时段t18a至t19a期间接收关于第n 1上行链路信号upl_n 1的确认信号ack。
231.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第十九时段t19a至t20a期间接收位置信号pos。
232.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第二十时段t20a至t21a期间接收数据信号dat。
233.因此,在实施例中,其中在第n帧n-frame中第一对象obj1被感测的时段t2a至t7a和其中在第n 1帧n 1-frame中第一对象obj1的位置被感测的时段t18a至t21a的总和小于根据图11a和图11b中示出的实施例的在第n帧n-frame中第一对象obj1被感测的时段t2a至t7a和其中在根据图11a和图11b中示出的实施例的第n 1帧n 1-frame中第一对象obj1的位置被感测的时段t18a至t23a的总和。即,可以减少时隙的数量。
234.另外,在实施例中,与第一对象obj1对应,由在第n帧n-frame的第一时段t1a至t2a中产生的第n上行链路信号up1_n引起的噪声分量被由在第n 1帧n 1-frame的第十五时段t15a至t16a中产生的第n反相信号iupl_n引起的噪声分量抵消。因此,可以防止由上行链路信号引起的显示质量劣化。
235.另外,在实施例中,与图9a和图9b一样,上行链路信号被接收的时间和水平同步信号被接收的时间彼此对应。
236.具体地,在实施例中,在第n帧n-frame的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。另外,在第n 1帧n 1-frame的t15a时刻,当水平同步信号hsync被接收时,第n反相信号iupl_n被发送。因此,由第n上行链路信号upl_n产生的噪声被第n反相信号iupl_n更有效地抵消。
237.在下文中,将参照图13a和图13b描述根据本公开的另一实施例的用于使用不同协议感测第一对象obj1的方法。
238.图13a示出了根据本公开的另一实施例的用于在第n帧n-frame中使用不同协议感测第一对象obj1的方法。图13b示出了根据本公开的另一实施例的用于在第n 1帧n 1-frame中使用不同协议感测第一对象obj1的方法。
239.参照图13a,在实施例中,在第n帧n-frame中,第一对象obj1的协议被设定为使得确认信号ack在第n上行链路信号upl_n被接收之后的一个时隙t2a至t3a的延迟之后的第三时段t3a至t4a中被发送,并且确认信号ack在第n-1反相信号iupl_n-1被接收之后没有任何时隙的延迟地被发送。
240.在实施例中,第n-1反相信号iupl_n-1的第二时段t2a至t3a是紧接在第n上行链路
信号upl_n的第一时段t1a至t2a之后的时隙。
241.与图9a和图9b一样,在实施例中,由在第n帧n-frame的第一时段t1a至t2a期间发送的第n上行链路信号up1_n引起的噪声分量被在第二时段t2a至t3a期间发送的第n-1反相信号iupl_n-1抵消。
242.参照图13a,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n上行链路信号upl_n。
243.在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第一对象obj1接收第n上行链路信号upl_n。
244.在实施例中,在第n帧n-frame的第二时段t2a至t3a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送关于第n-1帧n-1-frame的第n-1上行链路信号upl_n-1的第n-1反相信号iupl_n-1。
245.在实施例中,第一对象obj1在下一个时隙中发送确认信号ack。
246.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第三时段t3a至t4a期间接收关于第n上行链路信号upl_n的确认信号ack。
247.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4在第四时段t4a至t5a期间接收位置信号pos。
248.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第五时段t5a至t6a期间接收数据信号dat。
249.参照图13b,在实施例中,在第n 1帧n 1-frame中,第一对象obj1的协议被设定为使得在第n反相信号iupl_n被接收之后第n 1上行链路信号upl_n 1被接收,并且与第n 1上行链路信号upl_n 1对应,确认信号ack在没有任何时隙的延迟的情况下被发送。
250.在实施例中,第n 1上行链路信号upl_n 1的时隙t16a至t17a紧接在第n反相信号iupl_n的时隙t15a至t16a之后。
251.与图9a和图9b一样,在实施例中,由在第n 1帧n 1-frame的第十五时段t15a至t16a期间发送的第n反相信号iupl_n引起的噪声分量被在第十六时段t16a至t17a期间发送的第n 1上行链路信号upl_n 1抵消。
252.参照图13b,在实施例中,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n反相信号iupl_n。
253.在实施例中,第一对象obj1不接收具有反相相位的信号。因此,第一对象obj1在第n 1帧n 1-frame的第十五时段t15a至t16a期间不能接收第n反相信号iupl_n。
254.在实施例中,在第n 1帧n 1-frame的第十六时段t16a至t17a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n 1上行链路信号upl_n 1。
255.在实施例中,在第n 1帧n 1-frame的第十六时段t16a至t17a期间,第一对象obj1接收第n 1上行链路信号upl_n 1。响应于第n 1上行链路信号upl_n 1,第一对象obj1在下一个时隙中发送确认信号ack。
256.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第十七时段t17a至t18a期间接收关于第n 1上行链路信号upl_n 1的确认信号ack。
257.另外,在实施例中,第一传感器tx1、tx2、tx3和tx4还在第十八时段t18a至t19a期间接收位置信号pos。另外,第一传感器tx1、tx2、tx3和tx4还在第十九时段t19a至t20a期间
接收数据信号dat。
258.根据图13a和图13b中示出的实施例,在第n帧n-frame中,确认信号ack在第一对象obj1接收到第n上行链路信号upl_n之后的一个时隙的延迟之后的一个时隙中被发送。另外,在第n 1帧n 1-frame中,确认信号ack在第一对象obj1接收到第n 1上行链路信号upl_n 1之后的下一个时隙中被发送。
259.然而,根据图12a和图12b中示出的实施例,在第n帧n-frame中,确认信号ack在第一对象obj1接收到第n上行链路信号upl_n之后的下一个时隙中被发送。另外,在第n 1帧n 1-frame中,确认信号ack在第一对象obj1接收到第n 1上行链路信号upl_n 1之后的下一个时隙中被发送。
260.即,根据图13a和图13b中示出的实施例,当在上行链路信号与反相信号之间不存在时隙并且帧frame的开始信号是上行链路信号时,第一对象obj1在一个时隙的间隔之后发送确认信号ack。当帧frame的开始信号是反相信号时,第一对象obj1在上行链路信号被接收之后的下一个时隙中发送确认信号ack。即,可以调整其中第一对象obj1发送确认信号ack的时隙。
261.然而,根据图12a和图12b中示出的实施例,当在上行链路信号与反相信号之间存在单个时隙时,第一对象obj1发送确认信号ack的时间是在上行链路信号被接收之后的下一个时隙。因此,在图12a和图12b中示出的实施例中,不能调整其中第一对象obj1发送确认信号ack的时隙。
262.另外,在图13a和图13b中示出的实施例中,与图12a和图12b中示出的实施例相比,可以调整其中第一对象obj1发送确认信号ack的时隙。
263.另外,在图13a和图13b中示出的实施例中,与图12a和图12b中示出的实施例相比,可以进一步减少在第一对象obj1被感测之前的时隙的数量。
264.另外,在实施例中,由在第n帧n-frame的第一时段t1a至t2a中产生的第n上行链路信号up1_n引起的噪声分量被由在第n 1帧n 1-frame的第十五时段t15a至t16a中产生的第n反相信号iupl_n引起的噪声分量抵消。因此,可以防止由上行链路信号引起的显示质量劣化。
265.另外,在实施例中,与图9a和图9b一样,在第n帧n-frame的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。另外,在第n 1帧n 1-frame的t15a时刻,当水平同步信号hsync被接收时,第n反相信号iupl_n被发送。因此,由第n上行链路信号upl_n产生的噪声被第n反相信号iupl_n更有效地抵消。
266.在下文中,将参照图14a和图14b描述根据本公开的另一实施例的用于感测第一对象obj1的方法。
267.图14a示出了根据本公开的另一实施例的用于在第n帧n-frame中感测第一对象obj1的方法。图14b示出了根据本公开的另一实施例的用于在第n 1帧n 1-frame中感测第一对象obj1的方法。
268.在实施例中,第一对象obj1通过使用诸如蓝牙的另一无线通信而与显示装置1通信。使用蓝牙等执行与确认信号ack和数据信号dat对应的数据发送/接收,因此,第一对象obj1仅产生关于传感器单元120的位置信号pos就足够了。
269.参照图14a,在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,传感器单元
120的第一传感器tx1、tx2、tx3和tx4发送第n上行链路信号up1_n。
270.在实施例中,在第n帧n-frame的第一时段t1a至t2a期间,第一对象obj1接收第n上行链路信号up1_n。响应于第n上行链路信号up1_n,第一对象obj1在下一个时隙中发送位置信号pos。
271.因此,在实施例中,在第一时段t1a至t2a与第三时段t3a至t4a之间的第二时段t2a至t3a期间,第一传感器tx1、tx2、tx3和tx4接收关于第n上行链路信号upl_n的位置信号pos。
272.在实施例中,在第n帧n-frame的第三时段t3a至t4a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送关于第n-1帧n-1-frame的第n-1上行链路信号upl_n-1的第n-1反相信号iupl_n-1。
273.与图9a和图9b一样,在实施例中,由在第n帧n-frame的第一时段t1a至t2a期间发送的第n上行链路信号up1_n引起的噪声分量被在第三时段t3a至t4a期间发送的第n-1反相信号iupl_n-1抵消。
274.参照图14b,在实施例中,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,传感器单元120的第一传感器tx1、tx2、tx3和tx4发送第n反相信号iupl_n。
275.在实施例中,第一对象obj1不接收具有反相相位的信号。因此,在第n 1帧n 1-frame的第十五时段t15a至t16a期间,第一对象obj1不能接收第n反相信号iupl_n。
276.与图9a和图9b一样,在实施例中,由在第n 1帧n 1-frame的第十五时段t15a至t16a期间发送的第n反相信号iupl_n引起的噪声分量被在第十七时段t17a至t18a期间发送的第n 1上行链路信号upl_n 1抵消。
277.在实施例中,在第n 1帧n 1-frame的第十七时段t17a至t18a期间,第一对象obj1接收第n 1上行链路信号upl_n 1。响应于第n 1上行链路信号upl_n 1,第一对象obj1在下一个时隙中发送位置信号pos。
278.因此,在实施例中,第一传感器tx1、tx2、tx3和tx4在第十八时段t18a至t19a期间接收关于第n 1上行链路信号upl_n 1的位置信号pos。
279.如图14a和图14b中所示,在实施例中,第一对象obj1仅产生位置信号pos,并且由在第n帧n-frame的第一时段t1a至t2a中产生的第n上行链路信号up1_n引起的噪声分量被由在第n 1帧n 1-frame的第十五时段t15a至t16a中产生的第n反相信号iupl_n引起的噪声分量抵消。因此,可以防止由上行链路信号引起的显示质量劣化。
280.另外,与图9a和图9b一样,在实施例中,在第n帧n-frame的t1a时刻,当水平同步信号hsync被接收时,第n上行链路信号upl_n被发送。另外,在第n 1帧n 1-frame的t15a时刻,当水平同步信号hsync被接收时,第n反相信号iupl_n被发送。因此,由第n上行链路信号upl_n产生的噪声被第n反相信号iupl_n更有效地抵消。
281.在根据本公开的实施例的显示装置及其驱动方法中,可以防止由于上行链路信号的发送而导致的显示质量劣化。
282.这里已经公开了实施例,并且尽管采用了特定术语,但是它们被使用并且仅在一般和描述性意义上被解释,而不是出于限制的目的。在一些情况下,如截止到提交本技术时的本领域技术人员将会清楚的,除非另外具体地指出,否则结合具体实施例描述的特征、特性和/或元件可以单独使用或与结合其他实施例描述的特征、特性和/或元件组合使用。因
此,本领域技术人员将理解的是,在不脱离如权利要求中阐述的本公开的实施例的精神和范围的情况下,可以进行形式和细节上的各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。