显示装置及其补偿方法
1.相关申请的交叉引用
2.本技术要求于2020年12月31日提交的韩国专利申请no.10-2020-0189303的优先权,为了所有目的通过引用将该专利申请的全部公开内容结合到本技术中。
技术领域
3.本发明涉及一种显示装置及其补偿方法。更具体地,本发明涉及一种通过在驱动显示装置时实时改变补偿时间点来感测子像素的驱动晶体管的阈值电压的方法以及涉及一种执行这种方法的显示装置。
背景技术:
4.随着信息导向社会的发展,开发了各种显示装置。近来,采用了诸如液晶显示(lcd)装置、等离子体显示面板(pdp)显示装置以及有机发光显示(oled)装置之类的各种显示装置。
5.构成有机发光显示装置的有机发光元件是自发光的,不需要单独的光源,从而可减小显示装置的厚度和重量。此外,有机发光显示装置具有诸如低功耗、高亮度和高响应速率之类的高质量特性。
6.由于包括在有机发光显示装置内的晶体管的特性或者由于有机发光元件的退化,这种有机发光显示装置可具有显示质量的退化。
技术实现要素:
7.因此,针对相关技术中出现的上述问题作出了本发明,本发明旨在提出一种感测子像素的驱动晶体管的特性的方法以及提出一种通过这种方法驱动的显示装置。
8.根据一个实施方式,提供一种显示装置,包括:具有多个子像素的显示面板;栅极驱动器,所述栅极驱动器被配置为在一帧的有效时段期间向设置在所述显示面板上的多条扫描线提供扫描信号,并且被配置为在一帧的空白时段的感测时段期间向设置在所述显示面板上的多条感测线提供感测信号;数据驱动器,所述数据驱动器被配置为向设置在所述显示面板上的多条数据线提供数据电压;以及时序控制器,所述时序控制器被配置为控制所述栅极驱动器和所述数据驱动器,其中所述时序控制器可被进一步配置为在以第一帧速率操作时确定第一有效时段、第一空白时段以及第一感测时段,并且在以第二帧速率操作时确定第二有效时段、第二空白时段和第二感测时段,其中在从所述第一帧速率的操作改变为所述第二帧速率的操作时,所述第一感测时段和所述第二感测时段可相同。
9.所述第一帧速率可大于所述第二帧速率,并且所述第一有效时段可与所述第二有效时段相同。
10.所述第二空白时段可长于所述第一空白时段。
11.所述第二感测时段的结束时间可与所述第二空白时段的结束时间相同。
12.所述第二感测时段的起始时间可以是从以所述第二帧速率操作时的一帧的结束
时间往回计算了所述第二感测时段的时间。在从所述第一帧速率的操作改变为所述第二帧速率的操作时,所述时序控制器可在所述第二空白时段期间选择任一条感测线,并且所述栅极驱动器可在所述第二感测时段期间将所述感测信号提供给选定的感测线。
13.在从所述第一帧速率的操作改变为所述第二帧速率的操作时,所述时序控制器可在所述第二空白时段期间选择多条感测线,并且所述栅极驱动器可在所述第二感测时段期间将所述感测信号提供给选定的多条感测线。
14.所述栅极驱动器可被配置为将所述感测信号依次提供给所述多条感测线的每一条。
15.所述多条感测线可在像素列方向上在所述显示面板上彼此相邻。
16.根据一个实施方式,提供一种显示装置的补偿方法,所述补偿方法包括:根据帧速率确定有效时段、空白时段以及感测时段;将所述帧速率从第一帧速率改变为第二帧速率;以及在与所述第一感测时段相同的第二感测时段期间感测子像素。
17.所述第一帧速率可大于所述第二帧速率,并且第一有效时段可与第二有效时段相同。
18.第二空白时段可长于第一空白时段。
19.所述第二感测时段的结束时间可与所述第二空白时段的结束时间相同。
20.感测子像素可包括:在从以所述第二帧速率操作时的一帧的结束时间往回计算所述第二感测时段的时间,开始所述第二感测时段。
21.感测子像素可包括:在所述帧速率从所述第一帧速率改变为所述第二帧速率时,在第二空白时段期间选择任一条感测线;以及通过在所述第二感测时段期间将感测信号提供给选定的感测线的子像素,感测所述子像素。
22.感测子像素可包括:在所述帧速率从所述第一帧速率改变为所述第二帧速率时,在第二空白时段期间选择多条感测线;以及通过在所述第二感测时段期间将感测信号提供给选定的多条感测线的子像素,感测所述子像素。
23.通过提供所述感测信号来感测所述子像素可包括:通过将所述感测信号依次提供给所述多条感测线的每一条来感测所述子像素。
24.所述多条感测线在像素列方向上可在显示面板上彼此相邻。
25.根据本发明,通过感测并补偿设置在每个子像素上的驱动晶体管的特性值,可改进显示装置的图像质量。
26.此外,根据本发明,通过在驱动可变刷新率(vrr)驱动模式时改变显示装置的实时补偿时间,可减少用于数据复位的存储器分配。
附图说明
27.从结合附图的下文详细描述,将更清楚地理解本发明的上述和其他目的、特征和其他优点。在附图中:
28.图1是图解根据本发明实施方式的显示装置的配置的框图;
29.图2是图解根据本发明实施方式的显示装置的视图;
30.图3是图解根据本发明实施方式的像素的结构的视图;
31.图4至图8是图解在驱动显示装置的同时补偿迁移率特性的视图;
32.图9是图解高速驱动模式和低速驱动模式的一帧的视图;
33.图10是图解当帧速率从高速驱动模式改变为低速驱动模式时根据第一实施方式的显示装置的实时补偿方法的时序图;
34.图11是图解当帧速率从高速驱动模式改变为低速驱动模式时根据第二实施方式的显示装置的实时补偿方法的时序图;
35.图12是图解当改变根据本发明实施方式的显示装置的驱动模式时的实时补偿方法的流程图。
具体实施方式
36.下文中,将参照附图详细描述本发明的实施方式。在本说明书中,将理解,当一个组件(或区域、层、部分)被称为在另一组件“上”或“连接至”或“接合至”另一组件时,其可直接设置在另一个组件上或者直接连接至或接合至另一组件,或者也可存在中间的第三组件。
37.相似的参考标记通篇指代相似的元件。此外,在附图中,为了清楚例示放大了组件的厚度、比例和尺寸。术语“和/或”包括关联元素可限定的一个或多个组合。
38.将理解,尽管在此使用诸如“第一”和“第二”之类的术语来描述各种元件,但这些元件不应受这些术语的限制。这些术语仅用于将一个组件与其他组件区分开。例如,在不背离所附权利要求书的范围的条件下,在一个实施方式中被称为第一元件的元件可在另一实施方式中称为第二元件。
39.此外,“在
…
下方”、“在
…
下”、“在
…
上方”和“上部”等是用来解释图中所示的组件的相对关系。这些术语是相对的概念并且是基于图中的方向来描述的。
40.术语“包括”或“包含”的含义指明特性、固定数量、步骤、操作、元素、组件或其组合的存在,但不排除其他特性、固定数量、步骤、操作、元素、组件或其组合的存在或添加。
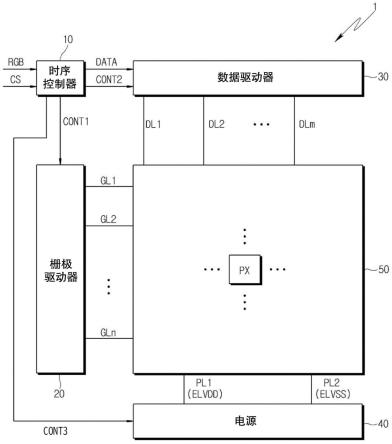
41.图1是图解根据本发明实施方式的显示装置的配置的框图。
42.参照图1,显示装置1包括时序控制器10、栅极驱动器20、数据驱动器30、电源40和显示面板50。
43.时序控制器10可从外部接收图像信号rgb和控制信号cs。图像信号rgb可包括多个灰度级数据。控制信号cs例如可包括水平同步信号、垂直同步信号和主时钟信号。
44.时序控制器10可将图像信号rgb和控制信号cs处理为适于显示面板50的操作条件的信号,从而时序控制器10可输出图像数据data、栅极驱动控制信号cont1、数据驱动控制信号cont2以及电源控制信号cont3。
45.栅极驱动器20可通过多条栅极线gl1至gln连接至显示面板50的像素px。栅极驱动器20可基于从时序控制器10输出的栅极驱动控制信号cont1产生栅极信号。栅极驱动器20可通过多条栅极线gl1至gln将所产生的栅极信号提供给像素px。
46.在各实施方式中,栅极驱动器20可进一步通过多条第二栅极线连接至显示面板50的像素px。栅极驱动器20可通过多条第二栅极线将感测信号提供给像素px。可提供感测信号以测量位于像素px内部的驱动晶体管和/或发光元件的特性。在一个示例中,栅极驱动器20可在一帧的有效时段期间向设置在显示面板50上的多条扫描线提供扫描信号,并且在一帧的空白时段的感测时段期间向设置在显示面板50上的多条感测线提供感测信号。
47.数据驱动器30可通过多条数据线dl1至dlm连接至显示面板50的像素px。数据驱动器30可基于从时序控制器10输出的图像数据data和数据驱动控制信号cont2产生数据信号。数据驱动器30可通过多条数据线dl1至dlm将所产生的数据信号提供给像素px。
48.在各实施方式中,数据驱动器30可进一步通过多条感测线(或基准线)连接至显示面板50的像素px。数据驱动器30可通过多条感测线将基准电压(感测电压或初始化电压)提供给像素px,或者可基于从像素px反馈的电信号来感测像素px的状态。
49.电源40可通过多条电源线pl1和pl2连接至显示面板50的像素px。电源40可基于电源控制信号cont3产生待提供给显示面板50的驱动电压。驱动电压例如可包括高电位驱动电压elvdd和低电位驱动电压elvsss。电源40可通过相应的电源线pl1和pl2将所产生的驱动电压elvdd和elvss提供给像素px。
50.在显示面板50中,设置多个像素px。像素px例如可在显示面板50上布置为矩阵形式。
51.每个像素px可电连接至相应的栅极线和相应的数据线。像素px可发射具有与分别通过栅极线gl1至gln和数据线dl1至dlm提供的栅极信号和数据信号对应的亮度的光。
52.每个像素px可显示第一色至第三色的任意之一。例如,每个像素px也可显示红色、绿色和蓝色的任一种。在另一实施方式中,每个像素px可显示青色、品红色和黄色的任一种。在另一实施方式中,像素px可被配置为显示四种或更多种颜色的任一种。例如,每个像素px也可显示红色、绿色、蓝色和白色的任一种。
53.时序控制器10、栅极驱动器20、数据驱动器30和电源40可被配置为分离的集成电路(ic),或者其至少一些集成在一起的ic。例如,数据驱动器30和电源40的至少之一可被配置为与时序控制器10集成在一起的集成电路。
54.此外,在图1中,栅极驱动器20和数据驱动器30被图示为与显示面板50分离的元件,但是栅极驱动器20和数据驱动器30的至少之一可按照与显示面板50形成为一体的面板内(in-panel)方式来配置。例如,栅极驱动器20根据面板内栅极(gip)方式可与显示面板50一体地形成。
55.图2是图解根据本发明实施方式的显示装置的视图。
56.参照图2,示出了矩形的显示面板50,显示面板50包括其中布置为多列和多行形式的多个像素px。例如,多个像素px可包括四个子像素,四个子像素可分别是红色子像素r、白色子像素w、绿色子像素g和蓝色子像素b。
57.此外,显示装置1包括栅极驱动ic(g-ic)20。显示面板50可实现为面板内栅极(gip)方式,其中栅极驱动ic 20设置在显示面板50内。栅极驱动ic 20可附接至显示面板50的左侧或右侧,或者左侧和右侧。
58.此外,显示装置1包括数据驱动ic(源极驱动ic:s-ic)30。源极驱动ic 30可附接在显示面板50的下方,或者多个源极驱动ic 30可沿显示面板50的横向方向(transverse direction)附接。这种源极驱动ic 30可实现为:膜上芯片(cof)方式,其设置在柔性pcb(fpcb)内部;玻上芯片(cog)方式,其设置在构成显示面板50的玻璃基板上,等等。
59.例如,在图2所示的实施方式中,源极驱动ic 30以cof方式实现,并且fpcb通过焊盘连接将显示面板50和源极pcb(s-pcb)连接在一起。源极驱动ic 30可从控制pcb(c-pcb)传输提供给显示面板50的电压(源极ic驱动电压、evdd、evss、vref等)。
60.源极pcb(s-pcb)可通过fpcb从显示面板50的下方连接至显示面板50,并且可通过柔性扁平电缆(fpc)连接方式连接至控制pcb(c-pcb)。源极pcb(s-pcb)直接连接至源极驱动ic 30并且将栅极信号传输给栅极驱动ic 20。此外,源极pcb(s-pcb)从控制pcb(c-pcb)接收电力(elvdd、elvss、vgh、vgl、vref等),并将其传输给显示面板50。此外,通过源极pcb(s-pcb)的最左侧或最右侧源极驱动ic 30来提供在控制pcb(c-pcb)和栅极驱动ic 20之间的连接。例如,栅极驱动ic驱动电压、栅极高电压vgh、栅极低电压vgl等通过源极pcb(s-pcb)从控制pcb(c-pcb)传输给栅极驱动ic 20。
61.控制pcb(c-pcb)设置在显示面板50的下方,并且通过源极pcb(s-pcb)和电缆fpc连接至显示面板50。控制pcb(c-pcb)可包括时序控制器(tcon)10、电源(pmic)40和存储器。时序控制器10和电源40的描述与参照图1的描述相同。此外,控制pcb(c-pcb)计算用于待输出的输出图像数据的每一帧的算法,存储补偿数据,并且需要用于存储算法计算所需的各种参数或者用于调节(tuning)的各种参数的区域。此外,易失性存储器和/或非易失性存储器可设置在控制pcb(c-pcb)上。
62.图3是图解根据本发明实施方式的像素的结构的视图。
63.参照图3,一个像素包括四个子像素r、w、g和b,并且每个子像素连接至栅极驱动ic g-ic、扫描线scan和感测线sense,并且通过基准线reference连接至源极驱动ic s-ic。此外,每个子像素通过数模转换器dac从源极驱动ic s-ic接收数据电压vdata。此外,从每个子像素输出的感测电压vsen通过模数转换器adc提供给源极驱动ic s-ic。此外,每个子像素连接至高电位驱动电压elvdd和低电位驱动电压elvss。
64.每个子像素包括扫描tft s-tft、驱动tft d-tft以及感测tft ss-tft。此外,每个子像素包括存储电容器cst和发光元件oled。
65.扫描晶体管s-tft的第一电极(例如源极)连接至数据线dl,数据电压vdata从源极驱动ic s-ic输出并且通过dac施加给数据线。扫描晶体管s-tft的第二电极(例如漏极)连接至存储电容器cst的一端并连接至驱动tft d-tft的栅极。扫描晶体管s-tft的栅极连接至扫描线(或栅极线gl)。也就是说,当通过扫描线scan施加栅极导通电平的栅极信号时,扫描晶体管s-tft导通,从而通过数据线dl施加的数据信号传输给存储电容器cst的一端。
66.存储电容器cst的一端连接至扫描tft s-tft的第二电极(例如漏极)。存储电容器cst的另一端被配置为接收高电位驱动电压elvdd。存储电容器cst可充入与施加给其一端的电压和施加给其另一端的高电位驱动电压elvdd之差对应的电压。此外,存储电容器cst可充入与施加给其一端的电压和通过开关spre和感测tft ss-tft施加给其另一端的基准电压vref之差对应的电压。
67.驱动晶体管d-tft的第一电极(例如源极)被配置为接收高电位驱动电压elvdd,第二电极(例如漏极)连接至发光元件oled的第一电极(例如阳极)。驱动晶体管d-tft的第三电极(例如栅极)连接至存储电容器cst的一端。当施加栅极导通电平的电压时,驱动晶体管d-tft导通,并且其可控制响应于提供给栅极的电压而流经发光元件oled的驱动电流量。也就是说,通过驱动tft d-tft的电压差vgs(或存储电容器cst的存储电压差)来确定电流,并将电流施加给发光元件oled。
68.感测tft ss-tft的第一电极(例如源极)连接至基准线reference,第二电极(例如漏极)连接至存储电容器cst的另一端。第三电极(例如栅极)连接至感测线sense。也就是
说,感测tft ss-tft通过从栅极驱动ic g-ic输出的感测信号导通,并将基准电压vref施加给存储电容器cst的另一端。如果开关spre和另一开关sam都截止并且感测tft ss-tft导通,则存储电容器cst的存储电压传输给基准线的电容器,并将感测电压vsen存储在基准线的电容器中。
69.如果开关spre截止并且另一开关sam导通,则存储在基准线电容器中的电压vsen通过adc被输出给源极驱动ic s-ic。此输出电压将用作用于感测和采样相应子像素的退化的电压。也就是说,可感测并采样用于补偿相应子像素的电压。具体地,驱动tft d-tft的特性被分为迁移率和阈值电压这两种,可通过感测驱动tft d-tft的迁移率和阈值电压来实现补偿。此外,还可通过发光元件oled的退化来确定相应子像素的特性,并且需要感测并补偿发光元件oled的退化程度。下文,将描述实时(rt)补偿方法。实时补偿方法是在显示装置1通电并且输出图像数据的同时,驱动tft d-tft的迁移率和阈值电压得到实时补偿的方法。
70.发光元件oled输出对应于驱动电流的光。发光元件oled可输出对应于红色、白色、绿色和蓝色的任一种的光。发光元件oled可以是有机发光二极管(oled)或者具有微米至纳米级范围的尺寸的超小无机发光二极管,但本发明不限于此。下文,将参考发光元件由有机发光二极管形成的实施方式来描述本发明的技术思想。
71.图3图解了扫描晶体管s-tft、驱动晶体管d-tft和感测晶体管ss-tft是nmos晶体管的示例。但是,本发明不限于此。例如,构成每个像素px的至少一些或全部晶体管可被构建为pmos晶体管。在各实施方式中,扫描晶体管s-tft和驱动晶体管d-tft可被实现为低温多晶硅(ltps)薄膜晶体管、氧化物薄膜晶体管或低温多晶氧化物(ltpo)薄膜晶体管。
72.此外,在参照图3的描述中,图示了四个子像素共享一条基准线reference。但是,本发明不限于此。不同数量的子像素可共享一条基准线reference,或者每个子像素可连接至一条基准线reference。在本技术中,为了便于说明,如图3所示,描述了四个子像素共享一条基准线reference,其应当被解释为一个示例。
73.图4至图8是图解在驱动显示装置的同时补偿迁移率特性的视图。也就是说,本发明的补偿是在显示装置通电并且图像数据正被输出的同时执行的补偿。此外,本技术的补偿对应于通过感测驱动tft d-tft的迁移率特性来校正偏差的补偿。
74.在显示装置的驱动期间的迁移率特性感测可在一帧和下一帧之间的空白时段(blank period)中执行。此外,由于四个子像素共享一条基准线,所以优选地不同时执行四个子像素的感测。此外,优选地,在连接至任一栅极线的子像素之中具有一种颜色的子像素在一空白时段中被感测,并且在连接至此栅极线的子像素之中具有其他颜色的子像素在下一空白时段中被感测。这是因为由于空白时段较短,连接至此栅极线的所有子像素可能不会都被感测。
75.参照图4,开关spre在初始化时段中导通。因此,存储在基准线电容器中的感测电压vsen等于基准电压vref。
76.参照图5,扫描tft s-tft在编程时段中导通。此外,数据电压vdata是高电压。因此,与数据电压vdat对应的电荷充入存储电容器cst的一端。此外,在编程时段中,感测tft ss-tft导通,开关spre导通。因此,存储电容器cst的另一端被充入对应于基准电压vref的电荷。也就是说,存储电容器cst上的电压对应于数据电压vdata与基准电压vref之差。同
时,由于开关spre保持为导通,所以感测电压vsen保持为基准电压vref。
77.参照图6,在感测时段中,扫描tft s-tft截止,并且感测tft ss-tft导通。因此,驱动tft d-tft像具有恒定幅度的恒定电流源那样操作,并且电流通过感测tft ss-tft被施加给基准线电容器。因此,感测电压vsen随着恒定电压随时间的增加而增加。
78.参照图7,在采样时段中,感测tft ss-tft截止,并且另一开关sam导通。因此,感测电压vsen通过基准线reference经由adc施加给源极驱动ic s-ic。被施加感测电压vsen的源极驱动ic s-ic可计算相应驱动tft的迁移率特性。
79.同时,参照图8,在采样时段之后的数据插入时段中,扫描tft s-tft导通,并且数据电压vdata是高电压。也就是说,由于执行实时补偿,所以在帧与帧之间的空白时段期间执行图4至图8的处理。因此,出现与充入现有数据电压的另一数据线之间的亮度偏差。为了校正亮度偏差,在前帧(previous frame)的数据在采样时段之后恢复。
80.图9是图解高速驱动模式和低速驱动模式的一帧的视图。
81.在详细描述之前,一个帧周期是指输出一个图像的时段。在一个帧周期期间,一个图像可以经由显示面板50输出。例如,当驱动频率是120hz时,120个图像可经由显示面板50输出。当驱动频率是60hz时,60个图像可经由显示面板50输出。
82.在一个实施方式中,当在多个帧周期期间经由显示面板50输出彼此不同的图像时,显示视频图像。当在多个帧周期期间输出相同图像时,显示静止图像。当图像数据是视频图像时,显示装置1可在高速驱动模式中驱动。当图像数据是静止图像时,显示装置1可在低速驱动模式下驱动。在图9中,高速驱动模式和低速驱动模式被分别描述为120hz驱动频率和60hz驱动频率。
83.换句话说,在高速驱动模式中的帧速率是120hz,这在本技术中称为第一帧速率。此外,在低速驱动模式中的帧速率是60hz,这在本技术中称为第二帧速率。但是,实施方式不限于此。
84.参照图9以及图1至图9,高速驱动模式的一帧和低速驱动模式的一帧包括有效时段(active period)和垂直空白时段(vertical blank period)。在一个实施方式中,可在空白时段内执行用于感测驱动tft的迁移率特性的感测时段。
85.具体地,在第一帧速率(120hz)时,有效时段可被确定为第一有效时段,空白时段可被确定为第一空白时段,并且感测时段可被确定为第一感测时段。此外,在第二帧速率(60hz)时,有效时段可被确定为第二有效时段,空白时段可被确定为第二空白时段,感测时段可被确定为第二感测时段。
86.例如,120hz时的第一有效时段是8.33毫秒(ms),第一空白时段是300微秒(μs),并且第一感测时段rt可与第一空白时段相同。因此,总共120个帧周期的和可以是1秒。此外,60hz时的第二有效时段是8.33ms,第二空白时段是8.33ms 600μs,并且第二感测时段rt可以是与第一感测时段相同的300μs。
87.也就是说,根据本发明,当帧速率从高速驱动模式改变为低速驱动模式时,第一有效时段和第二有效时段可被确定为相同。此外,第二空白时段可被确定为长于第一空白时段。具体地,第二空白时段可被确定为第一有效时段和两个第一空白时段之和。此外,第二感测时段可被确定为与第一感测时段相同。
88.如上所述,第一帧速率(120hz)可大于第二帧速率(60hz)。当显示装置1在第一帧
速率下操作时,可确定第一有效时段、第一空白时段和第一感测时段。例如,参照图9,在作为第一帧速率的120hz的驱动时,一个帧周期包括一个第一有效时段和一个第一空白时段,第一感测时段可包括在第一空白时段中。此外,参照图9,在作为第二帧速率的60hz的驱动时,一个帧周期包括一个第二有效时段和一个第二空白时段,并且第二感测时段可包括在第二空白时段中。也就是说,以第一帧速率(120hz)驱动的两个帧可以是以第二帧速率(60hz)驱动的一个帧。
89.根据本发明,第一感测时段和第二感测时段可相同。此外,第一有效时段可与第二有效时段相同。结果,第二空白时段可长于第一空白时段。
90.此外,参照图9,第二感测时段的结束时间可与第二空白时段的结束时间相同。换句话说,第二感测时段的结束时间可与第二帧速率时帧的结束时间相同。
91.此外,第二感测时段的起始时间可位于第二有效时段的结束时间之后(相差“第二空白时段-第二感测时段”)。换句话说,第二感测时段的起始时间可从第二帧速率时一个帧的结束时间往回计算了第二感测时段的时间。
92.但是,上述的第一帧周期、第一有效时段、第一空白时段、第一感测时段、第二帧周期、第二有效时段、第二空白时段和第二感测时段可被存储为根据本发明的显示装置的存储器中的参数。根据由输入控制命令确定的帧速率,显示装置可基于帧周期、有效时段、空白时段和感测时段(其取决于通过参考这些参数而确定的帧速率)来执行驱动。
93.更具体地,在有效时段期间,栅极驱动器20和数据驱动器30可根据时序控制器10的控制依次扫描像素px,并且可将图像数据提供给每个子像素。根据时序控制器10的控制,在空白时段的感测时段期间,栅极驱动器20和数据驱动器30可选择任一条感测线并且可执行实时补偿。栅极驱动器20可在第二感测时段期间将感测信号提供给选定的感测线。
94.在本发明中,作为一种用于降低显示装置1的功耗的方法,可采用可变刷新率(vrr)驱动模式,其通过改变驱动频率来输出图像。vrr驱动模式是指驱动显示装置1的驱动方式。在vrr驱动模式中,具有相对较大灰度级变化的图像以驱动频率为120hz的高速驱动模式驱动,具有相对较小灰度级变化的图像以驱动频率为60hz的低速驱动模式驱动。如图9所示,将高速驱动模式和低速驱动模式进行比较,一帧的有效时段在这两个驱动模式中是相同的。但是,在一帧的空白时段中,低速驱动模式中的空白时段可长于高速驱动模式中的空白时段。
95.在根据图像数据将驱动模式从高速驱动模式改变为低速驱动模式的传统vrr驱动模式中的显示装置中,由于在空白时段的开始处执行实时补偿,所以可出现恢复数据(recovery data)的偏差。恢复数据可包括在感测之前的图像数据以及用于补偿由于实时感测操作而相对降低的亮度的补偿值。具体地,恢复数据的补偿值可包括用于补偿图像数据的充电时间差异以及恢复数据的充电时间差异的补偿值。
96.换句话说,当执行帧速率被改变的vrr驱动模式时,低速驱动模式的空白时段长于高速驱动模式的空白时段。因此,低速驱动模式中的恢复数据的充电时间没有选择,而是要长于高速驱动模式中的恢复数据的充电时间。因此,在传统的显示装置中,用于根据帧速率来将查找表等复位的存储器分配(memory allocation)是必需的。
97.为了解决这个问题,在根据本发明的显示装置1中,当帧速率从高速驱动模式改变为低速驱动模式时,可确定感测时间,以便查找表等不通过vrr模式驱动被复位。
98.图10是图解当帧速率从高速驱动模式变为低速驱动模式时根据第一实施方式的显示装置的实时补偿方法的时序图。
99.参照图10以及图1至图9,基于时序控制器10的控制,栅极驱动器20和数据驱动器30在一帧的空白时段期间选择任一条感测线(n或m),在感测时段期间对于选定的感测线执行实时补偿,并且可在数据插入时段期间对于执行了实时补偿操作的感测线,恢复在前的图像数据显示状态。具体地,在从第一帧速率的操作改变为第二帧速率的操作时,时序控制器10可在第二空白时段期间选择任一条感测线。
100.在低速驱动模式中的每个帧(n和n 1)可包括有效时段和空白时段。在一个实施方式中,可在空白时段内执行用于感测驱动tft的迁移率特性的感测时段。具体地,在低速驱动模式中,有效时段可指第二有效时段,空白时段可指第二空白时段,感测时段可指第二感测时段。
101.参照图10,第n感测线的实时补偿可在第n帧的第二感测时段期间执行,第m感测线的实时补偿可在第n 1帧的第二感测时段期间执行。在显示面板50上,在像素列方向上第m线离第n线最近。
102.在一个实施方式中,当模式从高速驱动模式改变为低速驱动模式时,低速驱动模式的第二感测时段的结束时间可被确定为与第二空白时段的结束时间相同,以便减小在这两个驱动模式之间恢复数据的偏差。具体地,在低速驱动模式的一个帧周期中,扫描tft s-tft和感测tft ss-tft在初始化时段(其中第二空白时段在第二有效时段之后开始)都截止。此外,仅感测tft ss-tft在一个帧周期结束之前的第二空白时段的第二感测时段导通。因此,在vrr驱动模式中,高速驱动模式和低速驱动模式时的恢复数据保持为相同,从而查找表等的复位变为不必要。
103.图11是图解当帧速率从高速驱动模式改变为低速驱动模式时根据第二实施方式的显示装置的实时补偿方法的时序图。
104.参照图11以及图1至图9,基于时序控制器10的控制,栅极驱动器20和数据驱动器30可在第n帧的空白时段期间同时选择多条感测线(n和m),并且可在空白时段的感测时段期间对选定的感测线依次执行实时补偿。具体地,在从第一帧速率的操作改变为第二帧速率的操作时,时序控制器10可在第二空白时段期间选择多条感测线。栅极驱动器20可在第二感测时段期间将感测信号提供给选定的多条感测线。在执行感测操作之后,在数据插入时段期间,对于多条感测线(n和m),可恢复在前的图像数据显示状态。
105.低速驱动模式中的第n帧可包括有效时段和空白时段。在一个实施方式,可在空白时段内执行用于感测驱动tft的迁移率特性的感测时段。具体地,在低速驱动模式中,有效时段可指第二有效时段,空白时段可指第二空白时段,感测时段可指第二感测时段。
106.与第一实施方式相比,在第二实施方式中,可在第n帧的第二空白时段期间执行第n感测线的实时补偿和第m感测线的实时补偿这两者。第n感测线和第m感测线可设置为在显示面板50上的像素列方向上彼此最靠近,或者可在像素列方向上设置在彼此最远离的位置处。
107.在一个实施方式中,当模式从高速驱动模式改变为低速驱动模式时,低速驱动模式的第二感测时段的结束时间可被确定为与第二空白时段的结束时间相同,以便减小在这两个驱动模式之间的恢复数据的偏差。具体地,在低速驱动模式中的第n帧周期中,在第n线
和第m线上的扫描tft s-tft和感测tft ss-tft(对应于扫描信号scan(n)和scan(m)以及感测信号sense(n)和sense(m))的全部在初始化时段(其中第二空白时段在第二有效时段之后开始)中截止。此外,在第n帧周期结束之前的第二空白时段的第二感测时段中,第n感测线的感测tft ss-tft和第m感测线的感测tft ss-tft依次导通。也就是说,根据第二实施方式,通过在第n帧周期的第二感测时段内依次执行第n感测线和第m感测线的实时补偿,即依次将感测信号提供给第n感测线和第m感测线的每一条,可减少显示面板50的整个感测时间。
108.尽管如上所述描述了第n感测线和第m感测线的实时感测的执行,但本发明的实施方式不限于此。
109.图12是图解当根据本发明实施方式的显示装置的驱动模式改变时的实时补偿方法的流程图。
110.参照图12以及图1至图9,在操作1201中,时序控制器10可根据从显示面板50输出的图像数据将帧速率确定为高速驱动模式或低速驱动模式。高速驱动模式和低速驱动模式的每一个的一个帧周期可包括有效时段和垂直空白时段。用于感测驱动tft的迁移率特性的感测时段可在空白时段内执行。
111.具体地,在作为高速驱动模式的第一帧速率(120hz)时,有效时段可被确定为第一有效时段,空白时段可被确定为第一空白时段,并且感测时段可被确定为第一感测时段。此外,在第二帧速率(60hz)时,有效时段可被确定为第二有效时段,空白时段可被确定为第二空白时段,并且感测时段可被确定为第二感测时段。
112.例如,120hz时的第一有效时段是8.33ms,第一空白时段是300μs,第一感测时段可以与第一空白时段相同。因此,总共120个帧周期的和可以是1秒。此外,60hz时的第二有效时段是8.33ms,第二空白时段是8.33ms 600μs,第二感测时段可以是与第一感测时段相同的300μs。
113.也就是说,根据本发明,当帧速率从高速驱动模式改变为低速驱动模式时,第一有效时段和第二有效时段可被确定为相同。此外,第二空白时段可被确定为长于第一空白时段。具体地,第二空白时段可被确定为第一有效时段和两个第一空白时段之和。此外,第二感测时段可被确定为与第一感测时段相同。
114.更具体地,在有效时段期间,基于时序控制器10的控制,栅极驱动器20和数据驱动器30可依次扫描像素px,并且图像数据可提供给每个子像素。基于时序控制器10的控制,在下文将要描述的空白时段的感测时段期间,栅极驱动器20和数据驱动器30可选择任一条感测线并且可执行实时补偿。
115.在操作1202中,当输出具有相对较小灰度级变化的图像时,时序控制器10可将栅极驱动器20和数据驱动器30的驱动模式从高速驱动模式改变为低速驱动模式。也就是说,时序控制器10可改变驱动频率以降低显示装置1的功耗。高速驱动模式和低速驱动模式具有一帧的相同有效时段,但是低速驱动模式中的一帧的空白时段可长于高速驱动模式中的一帧的空白时段。
116.在操作1203中,在低速驱动模式中的感测时段期间可感测连接至感测线的子像素。在这种情形下,低速驱动模式的感测时段可保持为与高速驱动模式的感测时段相同。也就是说,低速驱动模式的感测时段的结束时间可保持为与高速驱动模式的感测时段的结束
时间相同。此外,在低速驱动模式中,感测时段的结束时间可与空白时段的结束时间相同。
117.因此,即使显示装置1的驱动模式从高速驱动模式改变为低速驱动模式,用于数据复位的存储器分配也是不必要的。
118.所属领域的技术人员将理解,在不改变本发明的技术思想或必要特征的条件下,本发明可以以其他具体形式来实现。因此,应理解,上述实施方式在所有方面都是示例性的,而非限制性的。本发明的范围通过所附权利要求书而不是上述的详细描述来限定,其应当解释为,根据所附权利要求书的含义和范围及其等同物而得到的所有替换或修改都落入本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。