1.本发明涉及材料搬运相关领域,具体是一种木质加工用智能物料搬运装置及方法。
背景技术:
2.木材加工,以木材为原料,主要用机械或化学方法进行的加工,其产品仍保持木材的基本特性。
3.在森林工业中,木材加工业和林产化学加工同为森林采伐运输的后续工业,是木材资源综合利用的重要部门。
4.而在板材的加工上,需对其进行堆叠及转运,其堆叠步骤大多还是以人堆叠为主,而在板材的堆叠中需线管工作人员进行反复弯腰和攀爬,具有一定的危险因素,且长时间的反复弯腰会对工作人员的腰部造成影响,且人工堆叠的效率较低。
技术实现要素:
5.本发明的目的在于提供一种木质加工用智能物料搬运装置及方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:
7.一种木质加工用智能物料搬运装置,包括:
8.工作台及固定安装于所述工作台底部的支腿,所述工作台中心处开设有通口;
9.第一承接板,所述第一承接板安装于所述通口内侧,所述第一承接板外侧对称设置有凸起块,所述凸起块与开设于所述通口内的滑槽滑动配合;
10.第一支撑板,所述第一支撑板固定安装于所述第一承接板上,所述第一支撑板上开设有两个呈对称设置的活动槽,所述活动槽内侧安装有承接结构,所述承接结构与安装于所述第一支撑板一侧的上料结构配合,以对板材进行堆叠;
11.两个固定安装于所述第一支撑板两侧的第二支撑板,两个所述第二支撑板相对一侧安装有用于向所述上料结构进行供料的转运结构,所述转运结构与安装在所述第一支撑板上的驱动结构连接,所述上料结构通过传动结构连接所述转运结构。
12.作为本发明进一步的方案:所述承接结构包括通过升降结构安装于所述第一支撑板背面的第二承接板,所述第二承接板朝向所述第一支撑板的一侧对称安装有两个第一t形块,所述第一t形块与开设于所述第一支撑板上的第一t形槽滑动配合,所述第二承接板上铰接有两个支撑件,所述支撑件活动安装于所述活动槽内侧,两个所述第一传动板的铰接处均安装有扭簧。
13.作为本发明再进一步的方案:所述上料结构包括固定于所述第一支撑板一侧的两个对称设置的导向杆,所述导向杆上滑动安装有导向套筒,所述导向套筒两端分别固定安装有第一送料件和第二送料件,所述第二送料件与安装于所述第一支撑板背面的牵拉结构连接;
14.所述导向套筒上固定安装有用于驱使所述支撑件翻转的传动件。
15.作为本发明进一步的方案:所述牵拉结构包括转动安装于所述第一支撑板背面的第一传动杆,所述第一传动杆上固定安装两个收卷辊,所述收卷辊通过牵引绳连接所述第二送料件,且所述第一支撑板顶部还转动安装有用于对所述牵引绳进行导向的引导轮,所述第一传动杆连接所述传动结构。
16.作为本发明再进一步的方案:所述升降结构包括贯穿所述第二承接板并与所述第二承接板固定的螺纹套筒,所述螺纹套筒内侧安装有与之螺纹配合的丝杆,所述丝杆转动安装于所述第一支撑板背面;
17.所述工作台及所述第一承接板上安装有用于驱使所述第一支撑板和所述丝杆同步转动的转向结构。
18.作为本发明再进一步的方案:所述转向结构包括转动安装于所述第一承接板上的第二齿轮,所述第二齿轮与固定安装于所述工作台上的齿环啮合,所述第二齿轮的转轴通过第四传动带连接所述丝杆;
19.所述工作台底部固定安装有第三支撑板,所述第三支撑板上固定安装有第二电机,所述第二电机的输送轴与所述第一承接板底部固定。
20.作为本发明再进一步的方案:所述转运结构包括转动安装于所述第二支撑板端部的第二传动杆,所述第二传动杆上对称固定有两个第二传动板,两个所述第二传动板之间转动安装有送料板,所述送料板的转轴通过第三传动带连接所述第二传动杆;
21.所述第二传动杆连接所述驱动结构,且所述送料板还连接所述传动结构。
22.作为本发明再进一步的方案:所述传动结构包括转动安装于所述第一支撑板一侧的传动盘,所述传动盘的转轴处安装有单向传动结构,所述单向传动结构连接所述第二传动杆;
23.所述传动盘的偏心处转动安装有第一传动板,所述第一传动板与安装于所述第一支撑板一侧的齿条板转动连接,所述齿条板朝向所述第一支撑板的一侧固定有第二t形块,所述第二t形块与开设于所述第一支撑板上的第二t形槽滑动配合,所述齿条板与固定安装于所述第一传动杆上的第一齿轮啮合;
24.所述驱动结构包括固定固定安装于所述第一支撑板背面的第一电机,所述第一电机的输出轴通过第一传动带连接所述第二传动杆。
25.作为本发明再进一步的方案:所述单向传动结构包括同轴固定安装于所述传动盘转轴上的棘爪盘,所述棘爪盘与转动安装于所述第一支撑板一侧的棘齿筒单向配合,所述棘爪盘通过第二传动带连接固定安装于所述第二传动杆上的带轮。
26.一种木质加工用智能物料搬运方法,采用所述的木质加工用智能物料搬运装置,包括以下步骤:
27.步骤一、通过所述转运结构将板材转运至所述上料结构上,通过上料结构对板材进行依次堆叠;
28.步骤二、通过所述升降结构和转向结构对完成堆叠的板材进行抬升,且使其转动180
°
,以完成对板材的堆叠及搬运。
29.与现有技术相比,本发明的有益效果是:本技术通过对板材进行依次堆叠后,驱使堆叠后的板材转动180
°
,使其在上高处供料时提供便利,且可运用于板材加工后的堆叠转
运;
30.其次,本发明有着较高的自动化程度,一定程度的减少了相关工作人员的工作强度,其搬运的效率相对于人工搬运有着显著的提升。
附图说明
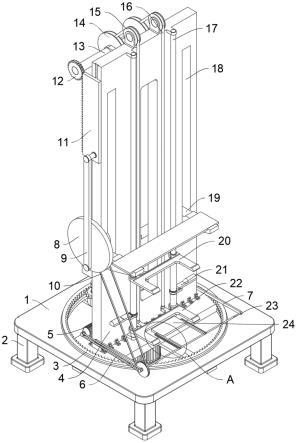
31.图1为木质加工用智能物料搬运装置的结构示意图。
32.图2为图1中a处的放大图。
33.图3为图1的又一方向的结构示意图。
34.图4为图1的又一角度的结构示意图。
35.图5为木质加工用智能物料搬运装置中传动结构的结构示意图。
36.图6为图5中b处的放大图。
37.图7为木质加工用智能物料搬运装置中单向传动结构的爆炸图。
38.图8为木质加工用智能物料搬运装置中传动件结构示意图。
39.图9为木质加工用智能物料搬运装置中上料结构的结构示意图。
40.图中:1、工作台;2、支腿;3、齿环;4、第一支撑板;5、第一电机;6、第一传动带;7、第二支撑板;8、传动盘;9、第一传动板;10、第二传动带;11、齿条板;12、第一齿轮;13、第一传动杆;14、收卷辊;15、引导轮;16、牵引绳;17、导向杆;18、活动槽;19、支撑件;20、第一送料件;21、传动件;22、第二送料件;23、第二传动杆;24、送料板;25、第二传动板;26、第三传动带;27、第三支撑板;28、第二电机;29、第一承接板;30、第二承接板;31、丝杆;32、第四传动带;33、第二齿轮;34、棘爪盘;35、棘齿筒。
具体实施方式
41.下面结合附图和具体实施方式对本发明作进一步详细的说明。本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
42.请参阅图1-9,本发明实施例中,一种木质加工用智能物料搬运装置,包括:
43.工作台1及固定安装于所述工作台1底部的支腿2,所述工作台1中心处开设有通口;
44.第一承接板29,所述第一承接板29安装于所述通口内侧,所述第一承接板29外侧对称设置有凸起块,所述凸起块与开设于所述通口内的滑槽滑动配合;
45.第一支撑板4,所述第一支撑板4固定安装于所述第一承接板29上,所述第一支撑板4上开设有两个呈对称设置的活动槽18,所述活动槽18内侧安装有承接结构,所述承接结构与安装于所述第一支撑板4一侧的上料结构配合,以对板材进行堆叠;
46.两个固定安装于所述第一支撑板4两侧的第二支撑板7,两个所述第二支撑板7相对一侧安装有用于向所述上料结构进行供料的转运结构,所述转运结构与安装在所述第一支撑板4上的驱动结构连接,所述上料结构通过传动结构连接所述转运结构。
47.请参阅图4和图9,所述承接结构包括通过升降结构安装于所述第一支撑板4背面
的第二承接板30,所述第二承接板30朝向所述第一支撑板4的一侧对称安装有两个第一t形块,所述第一t形块与开设于所述第一支撑板4上的第一t形槽滑动配合,所述第二承接板30上铰接有两个支撑件19,所述支撑件19活动安装于所述活动槽18内侧,两个所述第一传动板9的铰接处均安装有扭簧。
48.其中,在上料结构工作时候带需要堆叠的板材上升的同时带动处于所述支撑件19上的板材一并上升,并且同时驱使所述支撑件19翻转进行让位,当上料结构下降时通过扭簧的弹性势能驱使所述支撑件19复位,从而将处于所述上料结构及所述支撑件19上的板材堆叠至所述支撑件19上,通过所述支撑件19对其进行支撑。
49.请参阅图4,所述升降结构包括贯穿所述第二承接板30并与所述第二承接板30固定的螺纹套筒,所述螺纹套筒内侧安装有与之螺纹配合的丝杆31,所述丝杆31转动安装于所述第一支撑板4背面;
50.所述工作台1及所述第一承接板29上安装有用于驱使所述第一支撑板4和所述丝杆31同步转动的转向结构。
51.其中,在所述转向结构工作时带动所述丝杆31和所述第一支撑板4同步转动,在丝杆31转动时通过与所述螺纹套筒配合驱使所述第二承接板30进行竖立上升,以在所述第一支撑板4转动180
°
时驱使所述第二承接板30运动至行程末端。
52.请参阅图1、图3、图4,所述转向结构包括转动安装于所述第一承接板29上的第二齿轮33,所述第二齿轮33与固定安装于所述工作台1上的齿环3啮合,所述第二齿轮33的转轴通过第四传动带32连接所述丝杆31;
53.所述工作台1底部固定安装有第三支撑板27,所述第三支撑板27上固定安装有第二电机28,所述第二电机28的输送轴与所述第一承接板29底部固定。
54.其中,当所述第二电机28工作时带动所述第一承接板29转动,所述第一承接板29转动时带动所述第一支撑板4及安装于所述第一支撑板4上的零部件跟随转动,且同时带动所述第二齿轮33围绕所述齿环3的圆心处进行圆周转动,所述齿环3进行圆周转动时在所述齿环3的存在下进行自转,以在所述第二齿轮33进行自转时通过所述第四传动带32带动所述丝杆31转动。
55.请参阅图1,所述上料结构包括固定于所述第一支撑板4一侧的两个对称设置的导向杆17,所述导向杆17上滑动安装有导向套筒,所述导向套筒两端分别固定安装有第一送料件20和第二送料件22,所述第二送料件22与安装于所述第一支撑板4背面的牵拉结构连接;
56.所述导向套筒上固定安装有用于驱使所述支撑件19翻转的传动件21。
57.其中,在所述牵拉结构工作时带动所述第二送料件22进行竖立上升,以通过所述第二送料件22带动导向套筒及所述第一送料件20跟随竖立上升,以使所述第一送料件20和所述第二送料件22同步进行竖立运动;
58.在运动时通过所述第一送料件20带动处于所述支撑件19上的板材竖立上升,且同时通过所述第二送料件22带动通过转运结构共给的板材跟随上升,在上升的过程中通过驱使所述支撑件19进行翻转以避免所述第一承接板29与处于所述第二送料件22上的板材发生干涉,从而在所述第二送料件22和所述第一送料件20下降将处于所述第二送料件22上的板材放置于所述支撑件19上后将处于第一送料件20上的板材放置于通过所述第二送料件
22放置在所述支撑件19上的板材上,以重复上升运动状态实现对板材的堆叠;
59.还需要说明的是,请参阅图8,所述传动件21包括固定安装于所述导向套筒上的固定件,所述固定件上铰接有触发板,所述触发板铰接处安装有扭簧,以在导向套筒进行上升时通过触发板驱使驱使所述支撑件19翻转,在所述导向套筒下降时通过所述触发板与所述支撑件19配合使其可正常进下降。
60.请参阅图1和图2,所述转运结构包括转动安装于所述第二支撑板7端部的第二传动杆23,所述第二传动杆23上对称固定有两个第二传动板25,两个所述第二传动板25之间转动安装有送料板24,所述送料板24的转轴通过第三传动带26连接所述第二传动杆23;
61.所述第二传动杆23连接所述驱动结构,且所述送料板24还连接所述传动结构。
62.其中,在驱动结构工作时带动所述第二传动杆23转动180
°
,在所述第二传动杆23转动时带动所述第二传动板25跟随转动,以通过第二传动板25带动所述送料板24跟随转动;
63.在所述第二传动杆23转动时还通过所述第三传动带26带动所述送料板24转动,以使所述送料板24始终处于平行状态。
64.请参阅图1、图5、图6,所述传动结构包括转动安装于所述第一支撑板4一侧的传动盘8,所述传动盘8的转轴处安装有单向传动结构,所述单向传动结构连接所述第二传动杆23;
65.所述传动盘8的偏心处转动安装有第一传动板9,所述第一传动板9与安装于所述第一支撑板4一侧的齿条板11转动连接,所述齿条板11朝向所述第一支撑板4的一侧固定有第二t形块,所述第二t形块与开设于所述第一支撑板4上的第二t形槽滑动配合,所述齿条板11与固定安装于所述第一传动杆13上的第一齿轮12啮合。
66.其中,在所述第二传动杆23转动时带动单向传动结构工作,但不带动所述传动盘8转动,在所述传动盘8往返转动时带动通过单向传动结构带动所述传动盘8转动一圈;
67.当所述传动盘8转动时通过所述第一传动板9带动所述齿条板11进行一次处理往复运动,以通过所述齿条板11带动所述第一齿轮12转动指定圈数后往返转动指定圈数,以通过所述第一齿轮12带动所述第一传动杆13转动。
68.所述驱动结构包括固定固定安装于所述第一支撑板4背面的第一电机5,所述第一电机5的输出轴通过第一传动带6连接所述第二传动杆23。
69.需要说明的是,本发明中的第一电机5采用的是可损失在或逆时针转动的自锁电机,当然,也可根据实现生产选择其他型号,本技术不进行绝对限定,以满足驱动要求即可。
70.请参阅图5-图7,所述单向传动结构包括同轴固定安装于所述传动盘8转轴上的棘爪盘34,所述棘爪盘34与转动安装于所述第一支撑板4一侧的棘齿筒35单向配合,所述棘爪盘34通过第二传动带10连接固定安装于所述第二传动杆23上的带轮。
71.其中,在所述第二传动杆23转动时通过所述第二传动带10带动所述棘齿筒35转动,而此时,所述棘齿筒35不与所述棘爪盘34发生传动关系,当所述第二传动杆23反向转动时带动通过所述第二传动带10带动所述棘齿筒35反向转动,以通过所述棘齿筒35带动所述棘爪盘34跟随转动,从而通过所述棘爪盘34带动所述棘爪盘34带动所述传动盘8转动;
72.需要说明的是,所述棘爪盘34和所述棘齿筒35为现有技术的运动,当棘齿筒35顺时针方向转动时,驱动棘爪盘34的棘爪插入棘齿筒35的齿槽中,使棘爪盘34跟着转动,当棘
齿筒35逆时针方向转动时,棘爪阻止棘齿筒35发生逆时针方向转动,而驱动棘爪却能够在棘齿筒35齿背上滑过。
73.请参阅图1和图4,所述牵拉结构包括转动安装于所述第一支撑板4背面的第一传动杆13,所述第一传动杆13上固定安装两个收卷辊14,所述收卷辊14通过牵引绳16连接所述第二送料件22,且所述第一支撑板4顶部还转动安装有用于对所述牵引绳16进行导向的引导轮15,所述第一传动杆13连接所述传动结构。
74.其中,在所述传动结构工作时驱使所述第一传动杆13转动指定圈数后反向转动相同圈数,以通过所述第一传动杆13带动所述收卷辊14跟随转动,在所述收卷辊14进行转动时通过对所述牵引绳16进行缠绕和放线驱使所述第二送料件22进行一次竖立往复运动。
75.在本发明实施例中,当第一电机5工作时通过第一传动带6带动第二传动杆23转动180
°
后反向转动180
°
,所述第二传动杆23转动时带动第二传动板25跟随转动,且在第二传动杆23转动时还通过送料板24转动,以使送料板24在运动时始终处于平行状态,从而通过送料板24将板材转运至第二送料件22上,在第二传动杆23反向转动时通过第二传动带10带动棘齿筒35转动,以通过棘齿筒35带动所述棘爪盘34转动,棘爪盘34转动时带动传动盘8转动,传动盘8转动时通过第一传动板9带动齿条板11进行进行竖立往返运动,从而通过齿条板11带动第一齿轮12转动指定圈数后反向转动指定圈数,以通过第一齿轮12带动第一传动杆13及收卷辊14跟随转动,通过收卷辊14对牵引绳16的收放驱使第二送料件22进行竖立上升,从而通过第二送料件22带动导向套筒及第一送料件20跟随上升。
76.在第二送料件22和第一送料件20进行竖立上升时通过第二送料件22带动通过送料板24转运至第二送料件22上的板材跟随上升,且同时通过第一送料件20带动处于所述支撑件19上的板材跟随上升,通过传动件21驱使所述支撑件19翻转进行让位,在处于第二送料件22和第一送料件20上的板材均处于所述支撑件19上方时进行下降,以将板材堆叠在所述支撑件19上。
77.通过重复上升的运动状态,可对板材进行依次堆叠。
78.在第二电机28工作时通过输出端的输出轴带动第一承接板29转动,第一承接板29转动时带动第一支撑板4及安装于第一支撑板4上的零部件整体跟随转动,且同时带动第二齿轮33围绕所述齿环3的圆周处进行周转,从而通过第二齿轮33与齿环3的啮合驱使第二齿轮33在进行周转的同时进行自转,在第二齿轮33进行自转时通过第四传动带32带动丝杆31转动,从而通过丝杆31带动第二承接板30及支撑件19和堆叠在支撑件19上的板材跟随上升。
79.以对完成堆叠的材料进行抬升的同时驱使其转动180
°
,从而对板材进行搬运。
80.其中,本技术通过对第一电机5和第二电机28进行编程,使两者相互配合驱动,从而可完成整体的自动工作,可在人工的辅助下完成工作。
81.综上所述,本技术通过对板材进行依次堆叠后,驱使堆叠后的板材转动180
°
,使其在上高处供料时提供便利,且可运用于板材加工后的堆叠转运;其次,本发明有着较高的自动化程度,一定程度的减少了相关工作人员的工作强度,其搬运的效率相对于人工搬运有着显著的提升。
82.一种木质加工用智能物料搬运方法,采用所述的木质加工用智能物料搬运装置,包括以下步骤:
83.步骤一、通过所述转运结构将板材转运至所述上料结构上,通过上料结构对板材进行依次堆叠;
84.步骤二、通过所述升降结构和转向结构对完成堆叠的板材进行抬升,且使其转动180
°
,以完成对板材的堆叠及搬运。
85.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域及相关领域的普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。