1.本发明属于爬壁机器人领域,具体地说是一种具有曲面适应能力的滚动吸附爬壁机器人。
背景技术:
2.随着城市的建设与发展,各种工程项目不断增多,对这些建筑的质量要求也越来越高。目前在具有曲面壁面的风力发电、石化检测、水工建筑等相关行业中,例如风机的塔筒、石化塔和水工建筑壁面等因长期受水流冲击和日晒雨淋会产生裂缝、凹坑等缺陷,这些缺陷存在一定的安全隐患,需要进行定期的检查维护。传统的检查维护方法主要有用望远镜观察并记录、搭建脚手架、使用举升机、吊篮、人工悬吊作业等。采用人工检测的方法,存在检修工期长、劳动强度大、危险性高、成本高、检测范围受限等缺点。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种具有曲面适应能力的滚动吸附爬壁机器人。
4.本发明的目的是通过以下技术方案来实现的:
5.一种具有曲面适应能力的滚动吸附爬壁机器人,包括机器人底座及分别安装于该机器人底座上的负压产生装置、检测装置、驱动装置和滚动密封机构;
6.所述驱动装置带动爬壁机器人整体进行移动,该爬壁机器人通过所述检测装置检测周围壁面环境情况;
7.所述滚动密封机构的下表面贴附于周围壁面上,所述负压产生装置与所述滚动密封机构相配合,所述滚动密封机构内部空间通过所述负压产生装置形成负压,进而使爬壁机器人吸附在周围壁面上;所述爬壁机器人在移动的同时,所述滚动密封机构与周围壁面表面发生相对滚动并保持内部空间的密封状态。
8.所述滚动密封机构包括底座连接板、柔性气密织物管、底环框架、弹簧与滚动密封模块,所述底座连接板的上表面与所述机器人底座连接;
9.所述柔性气密织物管的上端与所述底座连接板的下表面连接,所述柔性气密织物管的下端与所述底环框架连接,所述底座连接板与所述底环框架之间通过弹簧连接;
10.所述滚动密封模块包括两个内隔板、两个外部框架、两个支撑辊a、两个支撑辊b、两个前后对应设置的同步带a与两个左右对应设置的同步带b,所述同步带a的外周面上与所述同步带b的外周面上均设有海绵材料层,所述同步带a上位于上侧的海绵材料层和所述同步带b上位于上侧的海绵材料层分别与所述底环框架的下表面抵接,所述同步带a上位于下侧的海绵材料层和所述同步带b上位于下侧的海绵材料层分别与壁面抵接,所述同步带a与邻近的所述同步带b之间相互抵接;
11.两个所述外部框架分别左右对称安装在所述底环框架下方,两个所述支撑辊a前后对应安装在两个所述外部框架之间,两个所述支撑辊b也前后对应安装在两个所述外部
框架之间,且两个所述支撑辊b分别设置在两个所述支撑辊a的前后两侧;
12.两个所述支撑辊b之间分别通过两个所述同步带b连接,设置在前侧的所述支撑辊a与设置在前侧的所述支撑辊b通过一个同步带a连接,设置在后侧的所述支撑辊a与设置在后侧的所述支撑辊b通过一个同步带a连接,每个所述内隔板的两端分别安装在两个所述支撑辊a的辊轴上,且两个所述内隔板的内侧面分别抵接于所述同步带a,两个所述内隔板、两个所述同步带a与两个所述同步带b围成的空间与所述柔性气密织物管的下端开口相连通;
13.所述柔性气密织物管、所述底环框架、两个所述内隔板、两个所述同步带a、两个所述同步带b与壁面构成一个密闭的内部空间,所述负压产生装置与该内部空间连通并使该内部空间产生负压,进而使爬壁机器人吸附在壁面上。
14.所述滚动密封机构还包括空气过滤器,所述空气过滤器位于所述柔性气密织物管内部,并安装在所述底座连接板的下表面,所述空气过滤器与所述负压产生装置连接,所述负压产生装置经由所述空气过滤器与所述滚动密封机构的内部空间连通。
15.所述底座连接板下表面与所述弹簧对应的位置上分别设有导向杆,且所述导向杆穿入至所述弹簧的内部。
16.所述底环框架的下表面上且在所述滚动密封模块的外侧还设有密封环。
17.所述负压产生装置包括真空泵,所述真空泵通过真空泵固定座与所述机器人底座连接,所述真空泵的抽气端与所述滚动密封机构内部空间连通。
18.所述检测装置包括摄像机支撑座、摄像机顶框、框架支架、摄像机安装外壳、摄像机安装背板与伺服电机;
19.所述摄像机支撑座安装于所述机器人底座上,所述摄像机顶框安装于所述摄像机支撑座上,所述伺服电机与所述框架支架分别安装于所述摄像机顶框上;
20.所述摄像机安装外壳与所述摄像机安装背板连接在一起组成摄像机安装框架,所述摄像机安装框架上安装有摄像机,所述摄像机安装外壳的两侧分别固接有一个框架支架环,所述框架支架环分别与所述框架支架转动连接,所述伺服电机驱动靠近所述伺服电机的一个所述框架支架环转动。
21.所述伺服电机的输出轴上设有齿轮a,靠近所述伺服电机的一个所述框架支架环上设有齿轮b,所述齿轮a与所述齿轮b相啮合;所述伺服电机依次通过所述齿轮a、所述齿轮b、所述框架支架环带动所述摄像机安装外壳转动。
22.所述驱动装置包括驱动装置外壳、驱动履带轮、驱动履带与驱动电机,所述驱动电机安装于所述驱动装置外壳上,所述机器人底座的左右两侧分别安装一个所述驱动装置外壳,所述驱动履带轮安装在所述驱动装置外壳内部,安装在同一个所述驱动装置外壳上的所述驱动履带轮之间通过所述驱动履带连接,所述驱动履带轮通过所述驱动电机驱动。
23.所述驱动装置还包括内部安装有张紧轮的张紧轮外壳,每侧的所述驱动装置外壳上各安装有一个所述张紧轮外壳,且每侧的所述张紧轮分别对对应侧的所述驱动履带进行张紧。
24.本发明的优点与积极效果为:
25.1.本发明针对具有曲面壁面的风力发电、石化检测、水工建筑等相关行业,可代替人工进行曲面壁面攀爬和检查维护,并可搭载作业工具代替人工作业;
26.2.本发明采用导向杆和弹簧的组合结构,使得滚动密封组件可以通过延伸和收缩
调节到接触表面的距离而符合接触表面的曲率(凸的或凹的),且在使得滚动密封机构在适应曲面的同时,能够减少滚动密封机构与壁面的摩擦,延长爬壁机器人的使用寿命;
27.3.本发明采用的同步带结构接地面积大,同步带表面设置泡棉材料层回弹性好,使爬壁机器人在壁面运动稳定,且对于不平整壁面的适应性好;
28.4.本发明通过采用滚动密封机构的设置,能够保证滚动密封机构与负压产生装置之间配合形成负压,使滚动密封模块在运动的同时维持对内部空间的密封,由于内部空间产生的负压从而产生稳定的吸附力使爬壁机器人稳定吸附在壁面上;
29.5.本发明通过张紧轮的设置,能够方便地对履带进行张紧,结构紧凑,使驱动装置传动系统稳定安全可靠;
30.6.本发明可搭载作业工具代替人工作业,不但减轻作业人员劳动强度,提高工作效率,同时减少危险,保障作业人员人身安全。
附图说明
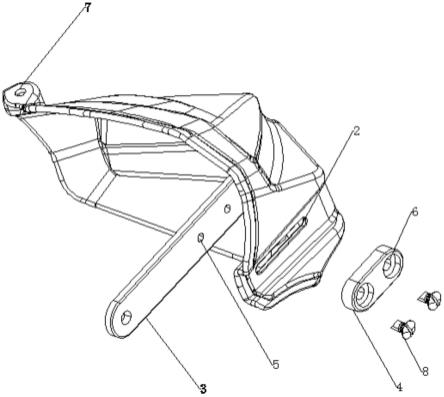
31.图1为本发明的整体结构的分解示意图;
32.图2为本发明的负压产生装置的结构示意图;
33.图3为本发明的检测装置的结构示意图;
34.图4为本发明的驱动装置的结构示意图;
35.图5为本发明的滚动密封机构的结构示意图;
36.图6为本发明的滚动密封模块的结构示意图;
37.图7为本发明的底座连接板与空气过滤器的设置结构示意图。
38.图中:1-负压产生装置、101-真空泵、102-真空泵固定座、2-检测装置、201-摄像机支撑座、202-摄像机顶框、203-框架支架、204-摄像机安装外壳、205-摄像机安装背板、206-伺服电机、207-框架支架环、208-齿轮a、209-齿轮b、3-驱动装置、301-驱动装置外壳、302-驱动履带轮、303-驱动履带、304-驱动电机、305-张紧轮、306-张紧轮外壳、4-机器人底座、5-滚动密封机构、501-底座连接板、502-柔性气密织物管、503-底环框架、504-弹簧、505-滚动密封模块、5051-内隔板、5052-外部框架、5053-支撑辊a、5054-支撑辊b、5055-同步带a、5056-同步带b、506-空气过滤器、507-导向杆、508-密封环。
具体实施方式
39.下面结合附图1-7对本发明作进一步详述。
40.一种具有曲面适应能力的滚动吸附爬壁机器人,包括机器人底座4及分别安装于该机器人底座4上的负压产生装置1、检测装置2、驱动装置3和滚动密封机构5,机器人底座4上还可以根据作业需求搭载其他作业工具;
41.驱动装置3带动爬壁机器人整体进行移动,该爬壁机器人通过检测装置2检测周围壁面环境情况;
42.滚动密封机构5的下表面贴附于周围壁面上,负压产生装置1与滚动密封机构5相配合,滚动密封机构5内部空间通过负压产生装置1形成负压,进而使爬壁机器人吸附在周围壁面上;爬壁机器人在移动的同时,滚动密封机构5与周围壁面表面发生相对滚动并保持内部空间的密封状态。
43.具体而言,如图5和图6所示,滚动密封机构5包括底座连接板501、柔性气密织物管502、底环框架503、弹簧504与滚动密封模块505,底座连接板501与机器人底座4连接,底座连接板501的上表面与机器人底座4之间的连接方式采用现有技术;
44.柔性气密织物管502的上端与底座连接板501的下表面连接,柔性气密织物管502的下端与底环框架503连接,底座连接板501与底环框架503之间通过弹簧504连接;本实施例中柔性气密织物管502为市购产品,其连接方式采用现有技术;
45.滚动密封模块505包括两个内隔板5051、两个外部框架5052、两个支撑辊a 5053、两个支撑辊b 5054、两个前后对应设置的同步带a 5055与两个左右对应设置的同步带b 5056,本实施例中同步带a 5055与同步带b 5056采用市购的密封性好的厚履带,同步带a 5055的外周面上与同步带b 5056的外周面上均设有海绵材料层,同步带a 5055上位于上侧的海绵材料层和同步带b 5056上位于上侧的海绵材料层分别与底环框架503的下表面抵接,同步带a 5055上位于下侧的海绵材料层和同步带b 5056上位于下侧的海绵材料层分别与壁面抵接,同步带a 5055与同步带b 5056表面设置泡棉材料层回弹性好,使爬壁机器人在壁面运动稳定,且对于不平整壁面的适应性好,同时保证与壁面和底环框架503之间的气密性,同步带a 5055与邻近的同步带b 5056之间相互抵接,以保证同步带a 5055与同步带b 5056之间的气密性;同步带a 5055与同步带b 5056分别在驱动装置3的带动爬壁机器人整体移动的同时沿着壁面滚动,可以尽可能符合接触面,并通过消除曲面和滚动密封模块505的间隙来产生完美的密封,能够产生足够的负压压力;
46.两个外部框架5052分别左右对称安装在底环框架503下方,两个支撑辊a 5053前后对应安装在两个外部框架5052之间,两个支撑辊b 5054也前后对应安装在两个外部框架5052之间,且两个支撑辊b 5054分别设置在两个支撑辊a 5053的前后两侧;
47.两个支撑辊b 5054之间分别通过两个同步带b 5056连接,两个支撑辊b 5054分别对两个同步带b 5056起到支撑作用,设置在前侧的支撑辊a 5053与设置在前侧的支撑辊b 5054通过一个同步带a 5055连接,并对前侧的同步带a 5055起到支撑作用,设置在后侧的支撑辊a 5053与设置在后侧的支撑辊b 5054通过一个同步带a 5055连接,并对后侧的同步带a 5055起到支撑作用,每个内隔板5051的两端分别安装在两个支撑辊a 5053的辊轴上,且两个内隔板5051的内侧面分别抵接于同步带a 5055,两个内隔板5051与两个同步带a5055、两个同步带b 5056围成的空间与柔性气密织物管502的下端开口相连通;本实施例中外部框架5052能够将同步带b 5056的侧面空隙完全挡住,进一步保证滚动密封模块505内部的密封性;
48.柔性气密织物管502、底环框架503、两个内隔板5051、两个同步带a 5055、两个同步带b 5056与壁面构成一个密闭的内部空间,负压产生装置1与该内部空间连通并使该内部空间产生负压,进而使爬壁机器人吸附在壁面上;
49.滚动密封机构5还包括空气过滤器506,如图7所示,空气过滤器506位于柔性气密织物管502内部,并安装在底座连接板501的下表面,空气过滤器506与负压产生装置1连接,负压产生装置1经由空气过滤器506与滚动密封机构5的内部空间连通;空气过滤器506的设置可以防止负压产生装置1吸入灰尘和碎屑等发生损坏;
50.底座连接板501下表面与弹簧504对应的位置上分别设有导向杆507,且导向杆507穿入至弹簧504的内部;导向杆507的设置,对弹簧504起到限位导向的作用;采用导向杆507
和弹簧504的组合结构,使得滚动密封机构5可以通过延伸和收缩调节到接触表面的距离而符合接触表面的曲率(凸的或凹的),且在使得滚动密封机构5在适应曲面的同时,能够减少滚动密封机构5与壁面的摩擦,延长爬壁机器人的使用寿命;
51.滚动密封模块505与底环框架503的连接处还设有密封环508,进一步增强滚动密封机构5的密封性能。
52.具体而言,如图2所示,负压产生装置1包括真空泵101,真空泵101通过真空泵固定座102与机器人底座4连接,真空泵101的抽气端与滚动密封机构5内部空间连通;本实施例中真空泵101为市购产品。
53.具体而言,如图3所示,检测装置2包括摄像机支撑座201、摄像机顶框202、框架支架203、摄像机安装外壳204、摄像机安装背板205与伺服电机206;
54.摄像机支撑座201安装于机器人底座4上,摄像机顶框202安装于摄像机支撑座201上,伺服电机206与框架支架203分别安装于摄像机顶框201上;
55.摄像机安装外壳204与摄像机安装背板205连接在一起组成摄像机安装框架,摄像机安装框架上安装有摄像机,摄像机安装外壳204的两侧分别固接有一个框架支架环207,框架支架环207分别与框架支架203转动连接,伺服电机206驱动靠近伺服电机206的一个框架支架环207转动;本实施例中伺服电机206与摄像机均为市购产品,并分别与外接控制器连接,摄像机用于获取周围壁面环境情况,伺服电机206的输出轴上设有齿轮a 208,靠近伺服电机206的一个框架支架环207上设有齿轮b 209,齿轮a 208与齿轮b 209相啮合;伺服电机206依次通过齿轮a 208、齿轮b 209、框架支架环207带动摄像机安装外壳204转动,从而使摄像机安装框架上的摄像机调整摄像角度。
56.具体而言,如图4所示,驱动装置3包括驱动装置外壳301、驱动履带轮302、驱动履带303与驱动电机304,驱动电机304安装于驱动装置外壳301上(图4为拆下安装与驱动电机304连接的一侧驱动装置外壳301并露出驱动装置外壳301内部结构的结构示意图),本实施例中驱动电机304为市购产品,由外接控制器控制动作;机器人底座4的左右两侧分别安装一个驱动装置外壳301,驱动履带轮302安装在驱动装置外壳301内部,安装在同一个驱动装置外壳301上的驱动履带轮302之间通过驱动履带303连接,驱动履带轮302通过驱动电机304驱动;驱动电机304驱动驱动履带轮302转动,从而使驱动履带轮302整体进行转动,进而使爬壁机器人整体沿着避免移动;驱动装置外壳301的设置起到保护内部驱动履带轮302与驱动履带303的作用。
57.驱动装置3还包括内部安装有张紧轮305的张紧轮外壳306,每侧的驱动装置外壳301上各安装有一个张紧轮外壳306,且每侧的张紧轮305分别对对应侧的驱动履带303进行张紧,以保证驱动履带303稳定传递动力并使爬壁机器人稳定移动。
58.工作原理:
59.柔性气密织物管502、底环框架503、两个内隔板5051、两个同步带a 5055、两个同步带b 5056与壁面构成一个密闭的内部空间,负压产生装置1与该内部空间连通并使该内部空间产生负压,进而使爬壁机器人吸附在壁面上;同步带a 5055与同步带b 5056分别在驱动装置3的带动爬壁机器人整体移动的同时沿着壁面滚动,可以尽可能符合接触面,并通过消除曲面和滚动密封模块505的间隙来产生完美的密封,能够产生足够的负压压力;同步带a 5055与同步带b 5056表面设置泡棉材料层回弹性好,使爬壁机器人在壁面运动稳定,
且对于不平整壁面的适应性好,同时保证与壁面和底环框架503之间的气密性;采用导向杆507和弹簧504的组合结构,使得滚动密封机构5可以通过延伸和收缩调节到接触表面的距离而符合接触表面的曲率(凸的或凹的),且在使得滚动密封机构5在适应曲面的同时,能够减少滚动密封机构5与壁面的摩擦,延长爬壁机器人的使用寿命;导向杆507的设置,对弹簧504起到限位导向的作用;驱动电机304驱动驱动履带轮302转动,从而使驱动履带轮302整体进行转动,进而使爬壁机器人整体沿着壁面移动,同时滚动密封机构5始终保持与壁面吸附的状态;检测装置2在爬壁机器人运行过程中检测周围壁面环境情况。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。