1.本实用新型涉及工业机器人技术领域,具体是一种工业机器人转运装置。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,工业机器人由主体、驱动系统和控制系统三个基本部分组成,主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行走机构,大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度,驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作,控制系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。
3.工业机器人在构建过程中会涉及到将其进行转运,现有的方式通常是将工业机器人吊至推车上,然后再推动推车进行移动,在推车移动过程中,操作人员需用手将工业机器人进行扶持,既麻烦又费事,并且还可能会因路面颠簸而导致工业机器人倾覆,造成其损坏。
4.因此,本实用新型提出一种工业机器人转运装置来解决上述问题。
技术实现要素:
5.本实用新型的实施例目的在于提供一种工业机器人转运装置,以解决上述问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种工业机器人转运装置,所述转运装置包括:
8.底座,其底部对称设有多组滚轮;
9.箱体,设于所述底座上方,其一侧面敞口;
10.减震组件,设于所述底座与箱体之间,用于对箱体进行减震;
11.固定组件,设于所述箱体上,用于将待转运的工业机器人进行固定。
12.在一种可选方案中:所述减震组件包括:
13.多根减震杆,对称设于所述底座上,每根减震杆远离底座的一端均固定连接于箱体底部;
14.多个腰形框,均匀设于底座与箱体之间,所述腰形框由弹簧钢制成,每个腰形框内均匀夹设有多个减震球。
15.在一种可选方案中:所述减震杆包括:
16.插筒;
17.插杆,滑动插设于所述插筒中,所述插杆位于插筒内的一端与插筒内腔底部之间设有减震弹簧。
18.在一种可选方案中:所述固定组件包括:
19.上压板,所述箱体内通过隔板隔分为条形腔和运载腔,所述上压板设于运载腔内,运载腔顶部滑动插设有至少一根限位杆以及旋插有螺纹杆,所述限位杆位于运载腔内的一端固定连接于上压板上,所述螺纹杆位于运载腔内的一端转动连接于上压板上,螺纹杆位于运载腔外的杆段上设有用于将其进行转动的把手;
20.所述条形腔内滑动卡设有两个活动座以及转动设有卷绕杆,所述隔板上开设有两道通槽,两个活动座上均固定设有连接杆,两根连接杆远离活动座的一端一一对应分别穿过两道通槽延伸至运载腔内,两根连接杆位于运载腔内的一端均固定设有侧夹板,所述卷绕杆上卷设有两根拉索,两根拉索活动端一一对应分别栓接于两个活动座上,所述条形腔侧壁上还固定设有用于驱动卷绕杆转动的旋转电机。
21.在一种可选方案中:两块所述侧夹板的相对端面上以及上压板朝向隔板的端面上均固定贴设有防护软垫。
22.相较于现有技术,本实用新型实施例的有益效果如下:
23.本装置结构布局紧凑合理,操作简单,使用方便,通过固定组件将待转运的工业机器人进行固定,然后直接将该装置推动进行移位即可,在装置移动过程中,配合上减震组件的减震作用,可有效减小箱体震动幅度,从而避免因路面颠簸而造成工业机器人倾覆,保证工业机器人完好。
附图说明
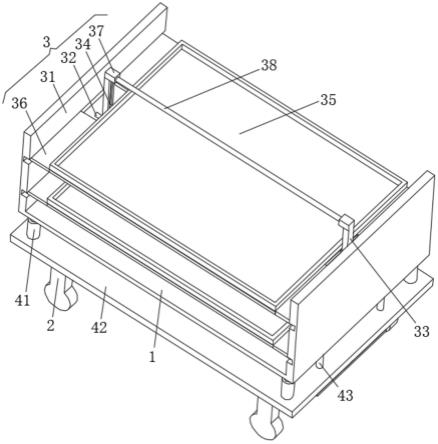
24.图1为本实用新型实施例的结构示意图。
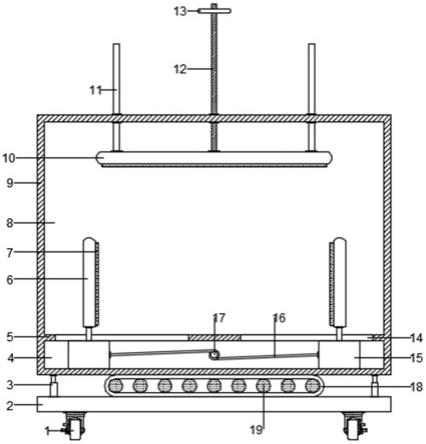
25.图2为本实用新型实施例中减震杆的结构示意图。
26.附图标记注释:1-滚轮、2-底座、3-减震杆、301-插筒、302-插杆、303-减震弹簧、4-条形腔、5-隔板、6-侧夹板、7-防护软垫、8-运载腔、9-箱体、10-上压板、11-限位杆、12-螺纹杆、13-把手、14-通槽、15-活动座、16-拉索、17-卷绕杆、18-腰形框、19-减震球。
具体实施方式
27.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
28.以下结合具体实施例对本实用新型的具体实现进行详细描述。
29.请参阅图1,本实用新型实施例中,一种工业机器人转运装置,所述转运装置包括:
30.底座2,其底部对称设有多组滚轮1;
31.箱体9,设于所述底座2上方,其一侧面敞口;
32.减震组件,设于所述底座2与箱体9之间,用于对箱体9进行减震;
33.固定组件,设于所述箱体9上,用于将待转运的工业机器人进行固定。
34.在本实施例中,通过固定组件将待转运的工业机器人进行固定,然后直接将该装置推动进行移位即可,在装置移动过程中,配合上减震组件的减震作用,可有效减小箱体震动幅度,从而避免因路面颠簸而造成工业机器人倾覆,保证工业机器人完好。
35.请参阅图1和图2,本实用新型的一个实施例中,所述减震组件包括:
36.多根减震杆3,对称设于所述底座2上,每根减震杆3远离底座2的一端均固定连接
于箱体9底部;
37.多个腰形框18,均匀设于底座2与箱体9之间,所述腰形框18由弹簧钢制成,每个腰形框18内均匀夹设有多个减震球19;
38.所述减震杆3包括:
39.插筒301;
40.插杆302,滑动插设于所述插筒301中,所述插杆302位于插筒301内的一端与插筒302内腔底部之间设有减震弹簧303。
41.在本实施例中,通过多根减震杆3、多个腰形框18以及多个减震球18的减震作用,可有效减小该装置在移动过程中因路面颠簸而造成箱体9震动的幅度。
42.本实用新型的一个实施例中,所述固定组件包括:
43.上压板10,所述箱体9内通过隔板5隔分为条形腔4和运载腔8,所述上压板10设于运载腔8内,运载腔8顶部滑动插设有至少一根限位杆11以及旋插有螺纹杆12,所述限位杆11位于运载腔4内的一端固定连接于上压板10上,所述螺纹杆12位于运载腔8内的一端转动连接于上压板10上,螺纹杆12位于运载腔8外的杆段上设有用于将其进行转动的把手13;
44.所述条形腔4内滑动卡设有两个活动座15以及转动设有卷绕杆17,所述隔板5上开设有两道通槽14,两个活动座15上均固定设有连接杆,两根连接杆远离活动座15的一端一一对应分别穿过两道通槽14延伸至运载腔8内,两根连接杆位于运载腔8内的一端均固定设有侧夹板6,所述卷绕杆17上卷设有两根拉索16,两根拉索16活动端一一对应分别栓接于两个活动座15上,所述条形腔4侧壁上还固定设有用于驱动卷绕杆17转动的旋转电机(图中未进行示意)。
45.在本实施例中,将待转运的工业机器人放置到运载腔8内,通过旋转电机带动卷绕杆17转动,卷绕杆17转动会将两根拉索16进行卷绕从而拉拽两个活动座15,使得两个活动座15相互靠近,即带动两块侧夹板6从工业机器人两侧将其夹紧,随后通过把手13将螺纹杆12进行转动,带动上压板10下降直至压在工业机器人上,从工业机器人顶部将其压紧,二者结合,从而实现将工业机器人固定。
46.进一步的,在本实施例中,两块所述侧夹板6的相对端面上以及上压板10朝向隔板5的端面上均固定贴设有防护软垫7,以避免将工业机器人夹损、划伤。
47.本实用新型上述实施例中提供了一种工业机器人转运装置,通过固定组件将待转运的工业机器人进行固定,然后直接将该装置推动进行移位即可,在装置移动过程中,配合上减震组件的减震作用,可有效减小箱体震动幅度,从而避免因路面颠簸而造成工业机器人倾覆,保证工业机器人完好。
48.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。