技术特征:
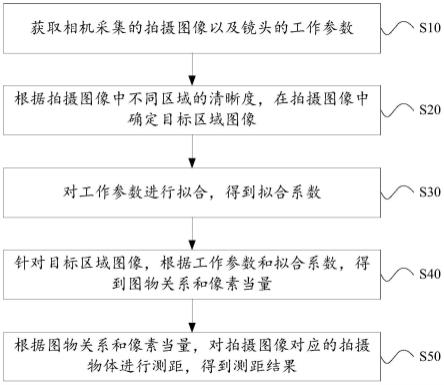
1.一种测距方法,其特征在于,应用于机器视觉系统,所述系统包括拍摄装置,所述拍摄装置包括相机以及设置在所述相机上的镜头;所述方法包括:获取所述相机采集的拍摄图像以及所述镜头的工作参数;根据所述拍摄图像中不同区域的清晰度,在所述拍摄图像中确定目标区域图像;对所述工作参数进行拟合,得到拟合系数;针对所述目标区域图像,根据所述工作参数和所述拟合系数,得到图物关系和像素当量,其中,所述图物关系为所述目标区域图像中任意像素点与对应的物点之间的映射关系,所述像素当量为所述任意像素点的像素当量;根据所述图物关系和所述像素当量,对所述拍摄图像对应的拍摄物体进行测距,得到测距结果。2.如权利要求1所述的测距方法,其特征在于,所述根据所述拍摄图像中不同区域的清晰度,在所述拍摄图像中确定目标区域图像的步骤包括:将所述拍摄图像划分为多个区域;通过清晰度计算方法,分别得到多个所述区域的清晰度;将所述清晰度在预设阈值范围内的区域确定为目标区域,得到目标区域图像。3.如权利要求1所述的测距方法,其特征在于,所述工作参数包括工作距离及对应的垂轴放大率;所述对所述工作参数进行拟合,得到拟合系数的步骤包括:对所述工作距离和所述垂轴放大率进行拟合,得到拟合系数,其中,拟合关系式为:wd=a
·
β-1
b a
·
β其中,wd表示所述镜头的工作距离,β表示所述镜头的垂轴放大率,a、b表示拟合系数。4.如权利要求3所述的测距方法,其特征在于,所述针对所述目标区域图像,根据所述工作参数和所述拟合系数,得到图物关系和像素当量的步骤,包括:根据所述工作参数和所述拟合系数,构建物像关系,所述物像关系为任意物点与在所述相机中对应的像点之间的映射关系;针对所述目标区域图像中的任意像素点,构建像图关系,所述像图关系为所述任意像素点与对应的像点之间的映射关系;根据所述物像关系和所述像图关系,得到图物关系和像素当量。5.如权利要求4所述的测距方法,其特征在于,所述工作参数包括焦距和像方主点的位置;所述根据所述工作参数和所述拟合系数,构建物像关系的步骤包括:以所述镜头的光轴为z轴,所述镜头的最前端面与所述光轴的交点为原点,所述最前端面的竖直方向为y轴,水平方向为x轴,建立空间坐标系;在所述空间坐标系中,根据所述工作参数和所述拟合系数,以任意物点和对应的像点构建物像关系,得到物像关系式:
其中,(x0,y0,z0)表示所述任意物点在所述空间坐标系中的坐标,(x0,y0,z
i
)表示所述任意物点对应的像点在所述空间坐标系中的坐标,h
′
表示所述像方主点在所述空间坐标系中的坐标,f表示所述镜头的焦距,a、b均表示所述拟合系数。6.如权利要求5所述的测距方法,其特征在于,所述针对所述目标区域图像中的任意像素点,构建像图关系的步骤包括:在所述目标区域图像中,以所述目标区域图像的中心点为原点,水平方向为x轴,竖直方向为y轴,建立图平面坐标系;在所述相机的像面中,以所述相机的感光芯片中心为原点,水平方向为x轴,竖直方向为y轴,建立像平面坐标系;在所述图平面坐标系中,确定一像素点,得到所述像素点在所述像平面坐标系中对应的像点;以所述像素点和所述像点构建像图关系,得到像图关系式:其中,(x
p
,y
p
)表示所述像素点在所述图平面坐标系中的坐标,(x
i
,y
i
)表示所述像素点对应的像点在所述像平面坐标系中的坐标,δ表示所述相机的像元大小。7.如权利要求6所述的测距方法,其特征在于,所述根据所述物像关系和所述像图关系,得到图物关系和像素当量的步骤包括:根据所述物像关系式和所述像图关系式,以任意像素点和对应的物点构建图物关系,得到图物关系式:其中,(x
p
,y
p
)表示任意像素点p在所述图平面坐标系中的坐标,(x
o
,y
o
,z
o
)表示所述任意像素点p对应的物点o在所述空间坐标系中的坐标,z
i
表示所述任意像素点p对应的像点i在所述空间坐标系中的z轴坐标;以及所述任意像素点的像素当量:
其中,δ表示所述任意像素点p的像素当量。8.如权利要求1所述的测距方法,其特征在于,所述根据所述图物关系和所述像素当量,对所述拍摄图像对应的拍摄物体进行测距,得到测距结果的步骤包括:根据所述图物关系,计算所述拍摄图像中任意像素点对应的实际物点与所述镜头的最前端面之间的距离,得到第一测距结果;根据所述像素当量,计算所述拍摄图像中任意两个像素点所对应的实际物点之间的距离,得到第二测距结果。9.一种机器视觉系统,其特征在于,所述系统包括:拍摄装置,用于采集拍摄图像;以及测距装置,用于根据所述拍摄图像进行测距;其中,所述拍摄装置包括相机以及设置在所述相机上的镜头;所述测距装置包括处理器和存储器,所述存储器上存储有测距程序,所述测距程序被所述处理器执行时,实现如权利要求1至8中任一项所述的测距方法。10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序可被一个或多个处理器执行,以实现如权利要求1至8中任一项所述的测距方法。
技术总结
本发明公开了一种测距方法、机器视觉系统及存储介质,涉及机器视觉技术领域,方法应用于机器视觉系统,包括:获取相机采集的拍摄图像以及镜头的工作参数;根据拍摄图像中不同区域的清晰度,在拍摄图像中确定目标区域图像;对工作参数进行拟合,得到拟合系数;针对目标区域图像,根据工作参数和拟合系数,得到图物关系和像素当量;根据图物关系和像素当量,对拍摄图像对应的拍摄物体进行测距,得到测距结果。本发明解决了现有技术中利用机器视觉系统测距,存在精确度较低的问题,实现了通用性高且最终测距结果更准确的效果。且最终测距结果更准确的效果。且最终测距结果更准确的效果。
技术研发人员:翁卓豪 张鑫炎 卢洋洋 韩暑
受保护的技术使用者:南京汇川图像视觉技术有限公司
技术研发日:2022.03.25
技术公布日:2022/6/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。