1.本发明涉及自主移动系统、自主移动方法和计算机可读非暂时性存储介质。
背景技术:
2.日本专利第6470322号(jp6470322b)描述了控制运输机器人的行进和路线生成。
技术实现要素:
3.例如,需要避免装载有要给予患者的药物、血液等的自主移动装置和装载有垃圾的自主移动装置彼此靠近放置,例如放置在同一部电梯中。
4.本发明是为了解决上述问题而做出的,提供了一种能够改善健康和卫生的观点的自主移动系统、自主移动方法和计算机可读非暂时性存储介质。
5.根据实施例的自主移动系统是在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动的自主移动系统。当该自主移动系统与清洁标志相关联时,自主移动系统被允许进入清洁区域并被禁止进入不清洁区域。当自主移动系统与不清洁标志相关联时,自主移动系统被允许进入不清洁区域并被禁止进入清洁区域。自主移动系统基于进入清洁区域和不清洁区域的规则搜索路线,并基于该规则移动。通过这种配置,可以改善健康和卫生的观点。
6.在上述自主移动系统中,该设施可以设置有电梯;并且当自主移动系统与清洁标志相关联时,自主移动系统可以被禁止和与不清洁标志相关联的另一自主移动系统一起放置在电梯的轿厢中。通过这种配置,可以改善电梯中的清洁的自主移动系统的健康和卫生的观点。
7.在上述自主移动系统中,该设施可以设置有电梯;并且其中已经放置有与清洁标志相关联的自主移动系统的电梯的轿厢的内部可以在预定时间段内被设定为清洁区域。通过这种配置,可以改善电梯中的清洁区域的健康和卫生的观点。
8.在上述自主移动系统中,该设施可以设置有自主移动系统在其中停止和等待的待命区域;并且当自主移动系统与清洁标志相关联时,该自主移动系统可以被禁止和与不清洁标志相关联的另一自主移动系统在相同的待命区域中等待。通过这种配置,可以改善待命区域中的清洁的自主移动系统的健康和卫生的观点。
9.在上述自主移动系统中,该设施可以设置有自主移动系统在其中停止和等待的待命区域;并且与清洁标志相关联的自主移动系统已在其中等待的待命区域在预定时间段内可以被设定为清洁区域。通过这种配置,可以改善待命区域中的清洁区域的健康和卫生的观点。
10.在上述自主移动系统中,当自主移动系统与清洁标志相关联时,自主移动系统可以远离与不清洁标志相关联的另一自主移动系统预定距离以上进行移动。通过这种配置,可以改善设施中移动的健康和卫生的观点。
11.在上述自主移动系统中,当自主移动系统与通用标志相关联时,自主移动系统可
以被允许进入清洁区域并被允许进入不清洁区域。通过这样的配置,可以提高自主移动系统的行进效率。
12.在上述自主移动系统中,设施中的预定区域在预定时间内可以被设定为清洁区域或不清洁区域。通过这种配置,可以提高设施中的使用效率。
13.根据实施例的自主移动系统包括:自主移动装置,其在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动;以及服务器装置,其向自主移动装置发送并从自主移动装置接收行进信息。当自主移动系统与清洁标志相关联时,自主移动系统被允许进入清洁区域并被禁止进入不清洁区域。当自主移动系统与不清洁标志相关联时,自主移动系统被允许进入不清洁区域并被禁止进入清洁区域。服务器装置基于进入清洁区域和不清洁区域的规则来搜索自主移动装置沿其移动的路线。自主移动装置基于该规则移动。通过这种配置,可以改善健康和卫生的观点。
14.在上述自主移动系统中,该设施可以设置有电梯,并且当自主移动装置与清洁标志相关联时,自主移动装置可以被禁止和与不清洁标志相关联的另一自主移动装置一起放置在电梯的轿厢中。可以改善电梯中的清洁的自主移动装置的健康和卫生的观点。
15.在上述自主移动系统中,该设施可以设置有电梯,并且服务器装置可以将其中已经放置有与清洁标志相关联的自主移动装置的电梯的轿厢的内部在预定时间段内设定为清洁区域。通过这种配置,可以改善电梯中的清洁区域的健康和卫生的观点。
16.在上述自主移动系统中,该设施可以设置有自主移动装置在其中停止和等待的待命区域,并且当自主移动装置与清洁标志相关联时,自主移动装置可以被禁止和与不清洁标志相关联的另一自主移动装置在相同的待命区域中等待。通过这种配置,可以改善待命区域中的清洁的自主移动装置的健康和卫生的观点。
17.在上述自主移动系统中,该设施可以设置有自主移动装置在其中停止和等待的待命区域;并且服务器装置可以将与清洁标志相关联的自主移动装置已在其中等待的待命区域在预定时间段内设定为清洁区域。通过这种配置,可以改善待命区域中的清洁区域的健康和卫生的观点。
18.在上述自主移动系统中,服务器装置可以使与清洁标志相关联的自主移动装置远离与不清洁标志相关联的另一自主移动装置预定距离以上进行移动。通过这种配置,可以改善设施中移动的健康和卫生的观点。
19.在上述自主移动系统中,当自主移动装置与通用标志相关联时,自主移动装置可以被允许进入清洁区域并被允许进入不清洁区域。通过这种配置,可以进一步提高行进效率。
20.在上述自主移动系统中,服务器装置可以将设施中的预定区域在预定时间内设定为清洁区域或不清洁区域。通过这种配置,可以改善健康和卫生的观点。
21.根据本实施例的自主移动方法是一种用于自主移动装置的自主移动方法,该自主移动装置在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动,该自主移动方法包括:将自主移动装置与清洁标志或不清洁标志相关联的步骤;基于进入清洁区域和不清洁区域的规则搜索自主移动装置沿其移动的路线的步骤,该规则是这样的规则,当自主移动装置与清洁标志相关联时,自主移动装置被允许进入清洁区域并被禁止进入不清洁区域,而当自主移动装置与不清洁标志相关联时,自主移动装置被允许进
入不清洁区域并被禁止进入清洁区域;以及基于该规则移动的步骤。通过这种配置,可以改善健康和卫生的观点。
22.根据本实施例的计算机可读非暂时性存储介质存储有自主移动程序。该自主移动程序是用于自主移动装置的自主移动程序,该自主移动装置在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动,该自主移动程序使计算机:将自主移动装置与清洁标志或不清洁标志相关联;基于进入清洁区域和不清洁区域的规则搜索自主移动装置沿其移动的路线,该规则是这样的规则,当自主移动装置与清洁标志相关联时,自主移动装置被允许进入清洁区域并被禁止进入不清洁区域,而当自主移动装置与不清洁标志相关联时,自主移动装置被允许进入不清洁区域并被禁止进入清洁区域;以及使自主移动装置基于该规则移动。通过这种配置,可以改善健康和卫生的观点。
23.本实施例可以提供能够改善健康和卫生的观点的自主移动系统、自主移动方法和计算机可读非暂时性存储介质。
附图说明
24.下面将参照附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中相同的标号表示相同的元件,并且其中:
25.图1是示出根据第一实施例的移动机器人的示意图;
26.图2是示出根据第一实施例的移动机器人的透视图;
27.图3是示出根据第一实施例的移动机器人的框图;
28.图4是示出根据第一实施例的移动机器人在设施中的移动的平面图;
29.图5是示出根据第一实施例的移动机器人在设施中的移动的平面图;
30.图6是示出用于根据第一实施例的设施中的移动机器人的自主移动方法的流程图;
31.图7是示出根据第二实施例的服务器装置的框图;以及
32.图8是示出根据第二实施例的自主移动系统的操作的序列图。
具体实施方式
33.在下文中,将通过本发明的实施例对本发明进行描述,但权利要求中的发明并不限于以下实施例。此外,并非实施例中描述的所有配置作为解决问题的手段都是必不可少的。为了清楚起见,已经适当地省略和简化了以下描述和附图。在各个附图中,相同的元件被赋予相同的附图标记,并且根据需要省略重复的说明。
34.第一实施例
35.将描述根据第一实施例的自主移动系统。在本实施例中,自主移动系统可以用自主移动装置代替,或者自主移动装置可以用自主移动系统代替。此外,根据本实施例的自主移动系统可以包括自主移动装置。自主移动装置在预定设施中自主移动。例如,自主移动装置可以是自主移动的移动机器人或者自主移动以运输物品的运输机器人。在下文中,移动机器人将作为自主移动装置的示例被描述。移动机器人将在“移动机器人的结构”和“移动机器人的操作”中被分别描述。
36.移动机器人结构
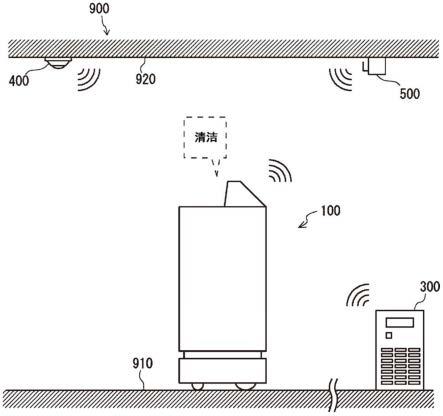
37.图1是示出根据第一实施例的移动机器人的示意图。如图1所示,移动机器人100是在预定设施900中自主移动的自主移动装置的示例。预定设施900例如是医院。该预定设施900不限于医院,并且可以是酒店、购物中心等,只要移动机器人100能够在该预定设施900中自主移动即可。
38.移动机器人100在设施900中的地板表面910上自主移动。设施相机400被固定在设施900中。例如,设施相机400被固定到设施900的天花板920,并且拍摄设施相机400的周围区域的图像以生成图像数据。可以在设施900中设置多个设施相机400。
39.移动机器人100和设施相机400彼此连接,以便能够经由诸如无线通信的信息传输手段彼此通信。移动机器人100和设施相机400可以彼此连接以便能够彼此直接通信,或者可以彼此连接以便能够经由接入点500和服务器装置300彼此通信。因此,移动机器人100可以直接从设施相机400获取图像数据,或者可以经由接入点500和服务器装置300获取图像数据。
40.接入点500例如是无线局域网(lan)接入点。接入点500被固定在设施900中并且从位于接入点500周围的移动机器人100获取位置信息和行进信息。可以在设施900中提供多个接入点500。
41.多个移动机器人100可以在设施900中自主移动。当移动机器人100自主移动时,移动机器人100可以彼此连接以便能够经由诸如无线通信的信息传输手段彼此通信。移动机器人100可以彼此连接以便能够彼此直接通信,或者可以彼此连接以便能够经由接入点500和服务器装置300彼此通信。
42.在移动机器人100、服务器装置300和另一移动机器人100之间发送和接收的信息可以包括标志信息,该标志信息与设施900中的多个区域和移动机器人100相关联。该标志信息例如为诸如与设施900中的区域的清洁度和由移动机器人100运输的物品的清洁度相关联的清洁标志、不清洁标志和通用标志的信息。稍后将描述标志信息的细节。
43.图2是示出根据第一实施例的移动机器人100的透视图。图3是图示出根据第一实施例的移动机器人100的框图。如图2和图3所示,移动机器人100包括驱动部110、壳体部120、通信单元130、操作接收部140、显示部150、传感器组160、标识(id)传感器170、控制单元180和存储单元190。
44.如图2所示,移动机器人100是在作为移动表面的地板表面910上移动的移动体。这里,为了便于说明移动机器人100,使用xyz正交坐标轴系统。地板表面910为xy平面,上侧为 z轴方向。
45.驱动部110用作用于移动移动机器人100的装置。驱动部110包括两个驱动轮111以及脚轮112,两个驱动轮111与地板表面910接触并且可围绕一个旋转轴彼此独立地旋转,该旋转轴在与直线方向(图中的前后方向或x轴方向)垂直的方向(图中的左右方向或y轴方向)上延伸,脚轮112与地板表面910接触。移动机器人100以这样的方式向前或向后移动,使得布置在左侧和右侧的驱动轮111以相同的旋转速度被驱动,并且通过在左、右驱动轮111之间产生旋转速度或旋转方向的差异来进行转弯。驱动部110根据来自控制单元180的命令驱动驱动轮111。
46.壳体部120布置在移动机器人100的驱动部110的上方。壳体部120可以具有收纳室门121。当收纳室门121打开时,在壳体部120的内部设置有用于收纳预定的运输物的收纳
室。即,移动机器人100也可以是运输预定物品的运输机器人。壳体部120可以根据来自控制单元180的命令打开和关闭收纳室门121。
47.如图3所示,通信单元130是可通信地连接到外部的接口。通信单元130包括例如天线和对通过天线发送的信号进行调制或解调的电路。通信单元130直接从设施相机400或者经由接入点500和服务器装置300接收图像数据。
48.此外,通信单元130可以从服务器装置300接收关于目的地的信息、关于是否允许移动的信息以及标志信息。此外,通信单元130可以向服务器装置300发送与移动机器人100的状态有关的信息、位置信息、行进信息、标志信息等。此外,通信单元130可以直接或经由接入点500和服务器装置300向另一移动机器人100发送位置信息、图像数据和标志信息以及从另一移动机器人100接收位置信息、图像数据和标志信息。
49.通信单元130可以周期性地向服务器装置300发送心跳信号。心跳信号可以包括按时间顺序指示移动机器人100的状态的日志数据。此外,心跳信号可以包括移动机器人100的标识(id)和用户的id。
50.通信单元130连接到控制单元180,向控制单元180输出包括从设施相机400和服务器装置300发送的信息的信号,并且向服务器装置300发送从控制单元180输出的信号。
51.操作接收部140接收来自用户的输入操作并向控制单元180发送操作信号。作为用于接收来自用户的输入操作的装置,操作接收部140可以包括例如操作按钮、叠加在显示部150上的触摸面板等。用户操作上述输入操作装置来打开和关闭电源、打开和关闭收纳室门121等。此外,用户可以操作操作接收部140以根据收纳在收纳室中的物品的清洁度输入与移动机器人100相关联的标志信息。例如,用户从操作接收部140输入清洁标志、不清洁标志、通用标志等。
52.显示部150设置为例如从壳体部120的上表面突出。显示部150例如是包括矩形液晶面板的显示部。显示部150根据来自控制单元180的命令适当地显示信息。接收来自用户的操作的触摸面板可以叠加在显示部150上。显示部150可以显示与移动机器人100相关联的标志信息。
53.传感器组160包括获取移动机器人100自主移动所需的数据的传感器。传感器组160包括例如机器人相机161和距离传感器162。传感器组160可以包括除了机器人相机161和距离传感器162之外的传感器。
54.例如,机器人相机161布置在壳体部120的上部和显示部150的下方。在机器人相机161中,具有相同视角的两个相机单元可以彼此在水平方向上分开布置。通过这种配置,由各个相机单元拍摄的图像作为图像数据被输出到控制单元180。
55.距离传感器162布置在例如壳体部120的下部中。距离传感器162可以布置在壳体部120的 x轴方向侧的表面、-x轴方向侧的表面、 y轴方向侧的表面和-y轴方向侧的表面中的各个的下部中。距离传感器162测量移动机器人100周围的物体的距离。控制单元180通过分析由机器人相机161输出的图像数据和由距离传感器162输出的检测信号来识别移动机器人100周围的障碍物,并测量移动机器人100与障碍物之间的距离。
56.id传感器170设置在例如显示部150的附近。id传感器170识别操作移动机器人100的用户的id,并检测在各个用户所拥有的id卡中包括的唯一标识符。id传感器170包括例如用于读取关于无线标签的信息的天线。用户将id卡靠近id传感器170,使得移动机器人100
识别作为操作者的用户的id。
57.控制单元180是包括诸如中央处理单元(cpu)的运算装置的信息处理装置。控制单元180包括设置在控制单元180中的硬件和存储在硬件中的程序。即,由控制单元180执行的处理由硬件或软件实现。
58.控制单元180从各个结构获取各种类型的信息并且根据获取的信息向各个结构发出命令。例如,控制单元180根据从机器人相机161获取的图像数据和从距离传感器162获取的关于移动机器人100周围的物体的信息来检测移动机器人100与周围物体之间的距离。此外,控制单元180基于与移动机器人100相关联的标志信息和与设施900中的区域相关联的标志信息计算到目的地的路线。然后,控制单元180命令驱动部110沿着计算出的路线移动。当执行这样的处理时,控制单元180参照存储在存储单元190中的与楼层地图有关的信息和与设施900中的区域相关联的标志信息。
59.存储单元190包括诸如闪存和固态驱动器(ssd)的非易失性存储器。存储单元190存储移动机器人100为了进行自主移动而使用的设施的楼层地图。此外,存储单元190存储与设施900中的区域相关联的标志信息。存储单元190连接到控制单元180,并响应于来自控制单元180的请求而向控制单元180输出存储的信息。
60.如图2所示,移动机器人100将其上安装有机器人相机161的 x轴方向侧作为前方。也就是说,在通常移动期间,行进方向为如箭头所示的 x轴方向。
61.对于如何定义移动机器人100的前方,可以采用各种想法。例如,可以基于如何布置用于识别周围环境的传感器组160来定义前方。具体地,可以将其上布置有具有高识别能力的传感器或布置有许多传感器的壳体部120的 x轴方向侧设定为前方。通过如上所述定义前方,移动机器人100可以在更准确地识别周围环境的同时移动。根据本实施例的移动机器人100也将其上布置有机器人相机161的 x轴方向侧作为前方。
62.可替代地,可以基于如何布置显示部150来定义前方。当显示部150显示人物的面部等时,周围的人自然地认识到显示部150是移动机器人100的前方。因此,当显示部150的显示面侧被设定为前方时,对周围的人几乎没有什么不适。根据本实施例的移动机器人100还将显示部150的显示面侧作为前方。
63.此外,可以基于移动机器人100的壳体的形状来定义前方。例如,当壳体部120在行进表面上的投影形状为矩形时,将短边侧设定为前方比将纵向侧设定为前方更好,从而在移动过程中不会阻碍彼此经过的人。即,取决于壳体的形状,存在当移动机器人100正常移动时优选设定为前方的壳体表面。根据本实施例的移动机器人100也将矩形形状的短边侧作为前方。如上所述,对于移动机器人100,前方被定义以匹配一些想法。然而,可以考虑移动机器人的形状和作用来确定采用哪种想法来定义前方。
64.移动机器人的操作
65.接下来,将描述根据本实施例的移动机器人的操作。例如,用户开启移动机器人100的电源。然后,用户将期望的任务输入到操作接收部140。必要时,当电源被开启时或当用户操作操作接收部140时,id传感器170识别用户的id。
66.为了运输物体作为期望的任务,用户操作操作接收部140以打开收纳室门121并将物品收纳在收纳室中。然后,用户操作操作接收部140以关闭收纳室门121。当收纳在收纳室中的物品是清洁物品时,用户将移动机器人100与清洁标志相关联。可替代地,用户将清洁
物品收纳在与清洁标志相关联的移动机器人100中。例如,用户操作操作接收部140以将移动机器人100与清洁标志相关联。
67.这里,清洁物品例如是人体摄入的药物、输血用的血液、食物等,与人体接触的未使用的注射器、未使用的注射针、衣物等。另一方面,不清洁物品是被处理掉的垃圾等。此外,通用物品是文具、复印纸等。
68.当收纳在收纳室中的物品是不清洁物品时,用户将移动机器人100与不清洁标志相关联。可替代地,用户将不清洁物品收纳在与不清洁标志相关联的移动机器人100中。例如,用户操作操作接收部140以将移动机器人100与不清洁标志相关联。
69.此外,当收纳在收纳室中的物品是通用物品时,用户将移动机器人100与通用标志相关联。可替代地,用户将通用物品收纳在与通用标志相关联的移动机器人100中。例如,用户操作操作接收部140以将移动机器人100与通用标志相关联。
70.清洁标志、不清洁标志和通用标志的关联不限于用户对操作接收部140的操作。移动机器人100可以使用传感器组160判定物品是清洁的、不清洁的还是通用的,并将物品与相应的标志相关联。此外,移动机器人100可以基于从服务器装置300发送的标志信息与标志相关联。
71.此外,移动机器人100并不总是与清洁标志、不清洁标志和通用标志中的任意一个相关联。可以存在不与标志相关联的任意移动机器人100。
72.接下来,用户使用操作接收部140输入物品的目的地。移动机器人100的控制单元180使用存储在存储单元190中的楼层地图和标志信息来搜索到目的地的路线。
73.图4是示出根据第一实施例的移动机器人100在设施900中的移动的平面图。如图4所示,设施900设置有电梯700。设施900可以具有多部电梯700。电梯700分别包括轿厢750a至轿厢750d。轿厢750a至轿厢750d是容纳人和物体并可以升降的箱形结构。设施900在电梯700的轿厢750a至轿厢750d停靠的楼层上设置有与电梯700相邻的电梯厅760a至电梯厅760d。
74.轿厢750a的内部和电梯厅760a被设定为与清洁标志相关联的清洁区域960。轿厢750b的内部和电梯厅760b被设定为与不清洁标志相关联的不清洁区域970。轿厢750c的内部和电梯厅760c被设定为与通用标志相关联的通用区域980。如上所述,设施900包括被设定为清洁区域960的区域和被设定为不清洁区域970的区域。此外,设施900还可以包括设定在通用区域980中的区域。通用区域980优选地位于清洁区域960与不清洁区域970之间。通过这种配置,可以抑制清洁区域960的清洁度由于清洁区域与不清洁区域之间的直接接触而降低。
75.注意,设施900中的区域并不总是与清洁标志、不清洁标志和通用标志中的任意一个相关联。设施900可以设置有不与标志相关联的区域。例如,设施900可以具有不与标志相关联的轿厢750d和电梯厅760d。
76.当移动机器人100与清洁标志相关联时,移动机器人100被允许进入清洁区域960并且被禁止进入不清洁区域970。因此,与清洁标志相关联的移动机器人100a被允许进入进入电梯厅760a和轿厢750a,并且被禁止进入电梯厅760b和轿厢750b。此外,当移动机器人100与清洁标志相关联时,移动机器人100可以被允许进入通用区域980。因此,移动机器人100a可以被允许进入电梯厅760c和轿厢750c。此外,移动机器人100a可以被允许进入不与
标志相关联的区域。因此,移动机器人100a可以被允许进入轿厢750d和电梯厅760d。
77.当移动机器人100与不清洁标志相关联时,移动机器人100被允许进入不清洁区域970,但是被禁止进入清洁区域960。因此,与不清洁标志相关联的移动机器人100b被允许进入电梯厅760b和轿厢750b,并且被禁止进入电梯厅760a和轿厢750a。此外,当移动机器人100与不清洁标志相关联时,移动机器人100可以被允许进入通用区域980。因此,移动机器人100b可以被允许进入电梯厅760c和轿厢750c。此外,移动机器人100b可以被允许进入不与标志相关联的区域。因此,移动机器人100b可以被允许进入轿厢750d和电梯厅760d。
78.当移动机器人100与通用标志相关联时,移动机器人100被允许进入通用区域980。此外,移动机器人100可以被允许进入清洁区域960并被允许进入不清洁区域970。在这种情况下,与通用标志相关联的移动机器人100c被允许进入电梯厅760c和轿厢750c,并且被允许进入电梯厅760a和电梯厅760b以及轿厢750a和轿厢750b。此外,移动机器人100c可以被允许进入不与标志相关联的区域。因此,移动机器人100c可以被允许进入轿厢750d和电梯厅760d。注意,移动机器人100可以被设定为使得当移动机器人100与通用标志相关联时,移动机器人100被禁止进入清洁区域960并且被禁止进入不清洁区域970。
79.移动机器人100基于进入清洁区域960和不清洁区域970的规则搜索移动路线。移动机器人100基于进入清洁区域960和不清洁区域970的规则在设施900中移动。
80.当移动机器人100与清洁标志相关联时,移动机器人100被禁止和与不清洁标志相关联的另一移动机器人100b一起进入电梯700的轿厢750c和轿厢750d(在下文中,将轿厢750c和轿厢750d统称为轿厢750)。例如,当与清洁标志相关联的移动机器人100a放置于轿厢750中时,与不清洁标志相关联的其他移动机器人100b被禁止进入同一轿厢750。此外,当与不清洁标志相关联的移动机器人100b放置于轿厢750中时,与清洁标志相关联的另一移动机器人100a被禁止进入同一轿厢750。
81.其中已经放置有与清洁标志相关联的移动机器人100a的轿厢750在预定时间段内被指定为清洁区域960。因此,与不清洁标志相关联的移动机器人100b在预定时间段内不能进入其中已经放置有移动机器人100a的轿厢750。另一方面,其中已经放置有与不清洁标志相关联的移动机器人100b的轿厢750在预定时间段内被设定为不清洁区域970。因此,与清洁标志相关联的移动机器人100a在预定时间段内不能进入其中已经放置有移动机器人100b的轿厢750。
82.此外,设施900中的预定区域可以在预定时间内被设定为清洁区域960或不清洁区域970。例如,轿厢750可以在预定时间内被设定为清洁区域960,并且轿厢750可以在此后的预定时间内被设定为不清洁区域970。
83.轿厢750被设定为清洁区域960或不清洁区域970的标志信息可以在移动机器人100之间被直接发送和接收,或者经由服务器装置300和接入点500被发送和接收。该预定时间段可以是例如一小时或一天。通过这种配置,轿厢750可以在预定时间段内专用于与清洁标志或不清洁标志相关联的移动机器人100,由此可以保持清洁度。
84.图5是示出根据第一实施例的移动机器人100在设施900中的移动的平面图。如图5所示,设施900包括待命区域930a至待命区域930d。待命区域930a至待命区域930d是移动机器人100停止和等待的地方。具体地,例如,待命区域930a至待命区域930d是移动机器人100中的其他移动机器人100a至100c停止和等待直到前面的移动机器人101完成向运输目的地
908的运输或经过设施900中的路径点(waypoint)909的地方。可以在设施900中设置多个待命区域930a至930d。待命区域930a至930d被设置为不干扰人和其他移动机器人100的移动,例如设置在过道902中。
85.例如,待命区域930a被设定为与清洁标志相关联的清洁区域960。待命区域930b被设定为与不清洁标志相关联的不清洁区域970。待命区域930c被设定为与通用标志相关联的通用区域980。如上所述,设施900可以包括被设定为清洁区域960的待命区域930a、被设定为不清洁区域970的待命区域930b和被设定为通用区域980的待命区域930c。此外,设施900可以包括不与标志相关联的待命区域930d。
86.与清洁标志相关联的移动机器人100a被允许进入待命区域930a并且被禁止进入待命区域930b。移动机器人100a可以被允许进入待命区域930c或者可以被允许进入待命区域930d。
87.与不清洁标志相关联的移动机器人100b被允许进入待命区域930b并且被禁止进入待命区域930a。移动机器人100b可以被允许进入待命区域930c或者可以被允许进入待命区域930d。
88.与通用标志相关联的移动机器人100c被允许进入待命区域930c。此外,可以允许移动机器人100c进入待命区域930a和待命区域930b。此外,移动机器人100c可以被允许进入待命区域930d。
89.当移动机器人100与清洁标志相关联时,移动机器人100被禁止和与不清洁标志相关联的其他移动机器人100b在同一待命区域中等待。例如,当与清洁标志相关联的移动机器人100a在待命区域930c和待命区域930d(在下文中,待命区域930c和待命区域930d统称为待命区域930)中等待时,与不清洁标志相关联的其他移动机器人100b被禁止在同一待命区域930中等待。此外,当与不清洁标志相关联的移动机器人100b在待命区域930中等待时,与清洁标志相关联的其他移动机器人100a被禁止在同一待命区域930中等待。
90.与清洁标志相关联的移动机器人100a已在其中等待的待命区域930在预定时间段内被指定为清洁区域960。因此,与不清洁标志相关联的移动机器人100b在该预定时间段内不能在待命区域930中等待。此外,与不清洁标志相关联的移动机器人100b已在其中等待的待命区域930在预定时间段内被设定为不清洁区域970。因此,与清洁标志相关联的移动机器人100a在该预定时间段内不能在待命区域930中等待。
91.此外,待命区域930可以在预定时间内被设定为清洁区域960,并且可以在此后的预定时间内被设定为不清洁区域970。
92.当移动机器人100a与清洁标志相关联时,移动机器人100a远离与不清洁标志相关联的其他移动机器人100b预定距离以上进行移动。类似地,当移动机器人100b与不清洁标志相关联时,移动机器人100b远离与清洁标志相关联的其他移动机器人100a预定距离以上进行移动。通过这种配置,可以保持清洁度。
93.将参照流程图描述上述移动机器人100的操作。图6是示出用于根据第一实施例的设施900中的移动机器人的自主移动方法的流程图。
94.如图6中的步骤s101所示,将移动机器人100与清洁标志、不清洁标志或通用标志相关联。例如,当用户将清洁物品收纳在收纳室中时,用户使用操作接收部140输入清洁标志。利用该处理,控制单元180将移动机器人100与清洁标志相关联。另一方面,当用户将不
清洁物品收纳在收纳室中时,用户使用操作接收部140输入不清洁标志。利用该处理,控制单元180将移动机器人100与不清洁标志相关联。此外,当用户将通用物品收纳在收纳室中时,用户使用操作接收部140输入通用标志。利用该处理,控制单元180将移动机器人100与通用标志相关联。
95.类似地,用户可以针对设施900中的区域预先输入标志信息。利用该处理,控制单元180设定与清洁标志相关联的清洁区域960、与不清洁标志相关联的不清洁区域970以及与通用标志相关联的通用区域980。标志信息的输入不限于用户的输入,并且可以是来自移动机器人100的传感器组160的输入或者来自服务器装置300的输入。此外,可以存在不与标志相关联的移动机器人100,或者可以存在不与标志相关联的区域。
96.接下来,如步骤s102所示,移动机器人100的控制单元180基于进入清洁区域960和不清洁区域970的规则搜索设施900中的路线。根据该规则,例如,当移动机器人100与清洁标志相关联时,移动机器人100被允许进入清洁区域960并且被禁止进入不清洁区域970。此外,根据该规则,当移动机器人100与不清洁标志相关联时,移动机器人100被允许进入不清洁区域970并且被禁止进入清洁区域960。此外,当移动机器人100与通用标志相关联时,移动机器人100可以被允许进入清洁区域960,并且还被允许进入不清洁区域970。
97.当基于进入清洁区域960和不清洁区域970的规则搜索移动机器人100移动所沿的路线时,其中已经放置有与清洁标志相关联的移动机器人100a的轿厢750以及与清洁标志相关联的移动机器人100已在其中等待的待命区域930可以在预定时间内被设定为清洁区域960。类似地,其中已经放置有与不清洁标志相关联的移动机器人100b的轿厢750以及移动机器人100b已在其中等待的待命区域930可以在预定时间段内被设定为不清洁区域970。
98.此外,设施900中的预定区域,例如轿厢750和待命区域930,可以在预定时间内被设定为清洁区域960或不清洁区域970。
99.接下来,如步骤s103所示,移动机器人100基于进入清洁区域960和不清洁区域970的规则移动。当移动机器人100基于该规则移动时,在移动机器人100与清洁标志相关联的情况下,移动机器人100被禁止进入电梯700的轿厢750和待命区域930中的和与不清洁标志相关联的其他移动机器人100b相同的轿厢750和相同的待命区域930。此外,在移动机器人100与不清洁标志相关联的情况下,移动机器人100被禁止进入电梯700的轿厢750和待命区域930中的和与清洁标志相关联的其他移动机器人100a相同的轿厢750和相同的待命区域930。
100.例如,与清洁标志相关联的移动机器人100a可以等待其他轿厢750a或750,以便不和与不清洁标志相关联的移动机器人100b放置在一起,或者可以搜索另一路线。
101.此外,当移动机器人100基于规则移动时,在移动机器人100与清洁标志相关联的情况下,移动机器人100远离与不清洁标志相关联的其他移动机器人100b预定距离以上进行移动。在移动机器人100与不清洁标志相关联的情况下,移动机器人100远离与清洁标志相关联的其他移动机器人100a预定距离以上进行移动。
102.接下来,将描述本实施例的效果。根据本实施例的移动机器人100基于进入清洁区域960和不清洁区域970的规则在设施900中移动。因此,可以抑制与清洁标志相关联的移动机器人100和与不清洁标志相关联的移动机器人100之间的接近。这使得可以改善健康和卫生的观点。
103.例如,在电梯700的轿厢750以及在待命区域930中,与清洁标志相关联的移动机器人100a被禁止和与不清洁标志相关联的其他移动机器人100b放置在一起。这使得可以改善电梯700的轿厢750和待命区域930中的健康和卫生的观点。
104.此外,与清洁标志相关联的移动机器人100a所使用的轿厢750和待命区域930在预定时间段内被设定为清洁区域960。通过这种配置,可以改善轿厢750和待命区域930中的清洁区域960的健康和卫生的观点。
105.第二实施例
106.接下来,将描述根据第二实施例的自主移动系统。根据本实施例的自主移动系统是控制在预定设施900中自主移动的自主移动装置的系统。自主移动系统将在“自主移动系统的配置”和“自主移动系统的操作”中被分别描述。
107.自主移动系统的配置
108.自主移动系统包括移动机器人100。自主移动系统可以包括多个移动机器人100。此外,除了移动机器人100之外,自主移动系统还可以包括服务器装置300。
109.移动机器人
110.根据本实施例的移动机器人100的配置与上述第一实施例的移动机器人100的配置相同。根据本实施例的移动机器人100可以使服务器装置300执行根据第一实施例的移动机器人100的一些功能。
111.例如,可以使服务器装置300执行移动机器人100与清洁标志、不清洁标志和通用标志的关联。此外,可以使服务器装置300执行设施900中的区域与清洁标志、不清洁标志和通用标志的关联。此外,可以使服务器装置300基于进入清洁区域960和不清洁区域970的规则搜索设施900中的路线。
112.服务器装置
113.服务器装置300例如是具有通信功能的计算机。服务器装置300可以安装在任何地方,只要服务器装置300可以与自主移动系统的各个结构进行通信。服务器装置300向移动机器人100发送和从移动机器人100接收行进信息。
114.图7是示出根据第二实施例的服务器装置的框图。如图7所示,服务器装置300包括通信单元330、控制单元380和存储单元390。
115.通信单元330分别与移动机器人100通信。通信单元330向控制单元380输出从各个结构接收的信号。此外,通信单元330向各个结构适当地发送从控制单元380输出的信号。通信单元330可以包括用于在服务器装置300与多个结构之间执行通信的路由器装置。通信单元330可以具有多个通信装置,各个通信装置对于与通信单元330通信的各个部件是不同的,以便与服务器装置300和各个结构进行通信。通信单元330可以经由内联网线路或互联网线路可通信地连接到各个结构。
116.控制单元380由诸如cpu的运算装置构成,并执行各种类型的信息处理。控制单元380可以将移动机器人100和设施900中的区域与清洁标志、不清洁标志和通用标志相关联。此外,控制单元380可以基于进入清洁区域960和不清洁区域970的规则来搜索设施900中的路线。
117.存储单元390包括诸如闪存和ssd的非易失性存储器。存储单元390存储移动机器人100为了自主移动而使用的设施的楼层地图。此外,存储单元390存储与设施900中的区域
相关联的标志信息。存储单元390连接到控制单元380,并响应于来自控制单元380的请求而向控制单元380输出存储的信息。
118.自主移动系统的操作
119.接下来,将描述自主移动系统的操作。图8是示出根据第二实施例的自主移动系统的操作的序列图。
120.如图8的步骤s201至步骤s203所示,服务器装置300将移动机器人100a至移动机器人100c分别与清洁标志、不清洁标志和通用标志相关联。此外,服务器装置300可以针对设施900中的区域设定与清洁标志相关联的清洁区域960、与不清洁标志相关联的不清洁区域970和与通用标志相关联的通用区域980。注意,可以存在不与清洁标志、不清洁标志和通用标志相关联的移动机器人100和区域。
121.接下来,如步骤s204至步骤s206所示,服务器装置300基于进入清洁区域960和不清洁区域970的规则,搜索移动机器人100a至移动机器人100c中的各个移动机器人在设施900中移动的路线。注意,当服务器装置300搜索路线时,服务器装置300可以将其中已经放置有与清洁标志相关联的移动机器人100a的轿厢750以及与清洁标志相关联的移动机器人100a已在其中等待的待命区域930在预定时间段内设定为清洁区域960。注意,当服务器装置300搜索路线时,服务器装置300可以将其中已经放置有与不清洁标志相关联的移动机器人100b的轿厢750以及与不清洁标志相关联的移动机器人100b已在其中等待的待命区域930在预定时间段内设定为不清洁区域970。
122.接下来,如步骤s207至步骤s209所示,服务器装置300向移动机器人100a至移动机器人100c发送搜索到的路线。
123.接下来,如步骤s210至步骤s212所示,移动机器人100a至移动机器人100c中的各个移动机器人沿着基于进入清洁区域960和不清洁区域970的规则搜索到的路线移动。如上所述,移动机器人100a至移动机器人100c在设施900中移动。
124.例如,当移动机器人100a基于该规则移动时,移动机器人100a在路线上的电梯700的轿厢750中发现与不清洁标志相关联的移动机器人100b,如步骤s213所示。在这种情况下,移动机器人100a不能进入其中放置有移动机器人100b的轿厢750。因此,如步骤s214所示,移动机器人100a请求服务器装置300搜索设施900中的另一路线。因此,如步骤s215所示,服务器装置300在该设施900中为移动机器人100a搜索另一路线。然后,如步骤s216所示,服务器装置300将路线发送至移动机器人100a。响应于此,移动机器人100a沿着新路线移动,如步骤s217所示。
125.根据本实施例的自主移动系统,服务器装置300可以执行移动机器人100的一些功能。例如,服务器装置300执行清洁区域960、不清洁区域970和通用区域980的设定以及移动机器人100的关联。因此,可以减少移动机器人100的负载,并且还可以提高移动机器人100的处理速度。
126.此外,可以控制移动机器人100的移动,从而可以提高移动效率。其他配置、操作和效果包含在第一实施例的描述中。
127.本发明不限于上述实施例,并且在不脱离其精神的情况下可以被适当修改。例如,第一实施例和第二实施例的配置的组合也包含在本实施例的技术思想的范围内。另外,以下所示的自主移动方法和自主移动程序也包含在本实施例的技术思想的范围内。
128.附录1
129.一种用于自主移动装置的自主移动方法,该自主移动装置在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动,该自主移动方法包括:将自主移动装置与清洁标志或不清洁标志相关联的步骤;基于进入清洁区域和不清洁区域的规则搜索自主移动装置沿其移动的路线的步骤,该规则是这样的规则,当自主移动装置与清洁标志相关联时,自主移动装置被允许进入清洁区域并被禁止进入不清洁区域,而当自主移动装置与不清洁标志相关联时,自主移动装置被允许进入不清洁区域并被禁止进入清洁区域;以及基于该规则移动的步骤。
130.附录2
131.在根据附录1的自主移动方法中,该设施设置有电梯;并且在基于该规则移动的步骤中,当自主移动装置与清洁标志相关联时,禁止将该自主移动装置和与不清洁标志相关联的另一自主移动装置一起放置在电梯的轿厢中。
132.附录3
133.在根据附录1的自主移动方法中,该设施设置有电梯;并且在搜索路线的步骤中,将其中已经放置有与清洁标志相关联的自主移动装置的电梯的轿厢的内部在预定时间段内设定为清洁区域。
134.附录4
135.在根据附录1的自主移动方法中,该设施设置有自主移动装置在其中停止和等待的待命区域,并且在基于该规则移动的步骤中,当自主移动装置与清洁标志相关联时,禁止该自主移动装置和与不清洁标志相关联的另一自主移动装置在相同的待命区域中等待。
136.附录5
137.在根据附录1的自主移动方法中,该设施设置有自主移动装置在其中停止和等待的待命区域,并且在搜索路线的步骤中,将与清洁标志相关联的自主移动装置已在其中等待的待命区域在预定时间段内设定为清洁区域。
138.附录6
139.在根据附录1的自主移动方法中,在基于该规则移动的步骤中,当自主移动装置与清洁标志相关联时,自主移动装置远离与不清洁标志相关联的另一自主移动装置预定距离以上进行移动。
140.附录7
141.在根据附录1的自主移动方法中,在搜索路线的步骤中,当自主移动装置与通用标志相关联时,允许自主移动装置进入清洁区域,并且也允许其进入不清洁区域。
142.附录8
143.在根据附录1的自主移动方法中,在搜索路线的步骤中,将设施中的预定区域在预定时间内设定为清洁区域或不清洁区域。
144.附录9
145.一种用于自主移动装置的自主移动程序,该自主移动装置在设置有被设定为清洁区域的区域和被设定为不清洁区域的区域的设施中自主移动,该自主移动程序使计算机:将自主移动装置与清洁标志或不清洁标志相关联;基于进入清洁区域和不清洁区域的规则搜索自主移动装置沿其移动的路线,该规则是这样的规则,当自主移动装置与清洁标志相
关联时,自主移动装置被允许进入清洁区域并被禁止进入不清洁区域,而当自主移动装置与不清洁标志相关联时,自主移动装置被允许进入不清洁区域并被禁止进入清洁区域;以及使自主移动装置基于该规则移动。
146.附录10
147.在根据附录9的自主移动程序中,该设施设置有电梯;并且该自主移动程序使计算机:当使与清洁标志相关联的自主移动装置基于该规则移动时,禁止将该自主移动装置和与不清洁标志相关联的另一自主移动装置一起放置在电梯的轿厢中。
148.附录11
149.在根据附录9的自主移动程序中,该设施设置有电梯;并且该自主移动程序使计算机:在搜索路线时,将其中已经放置有与清洁标志相关联的自主移动装置的电梯的轿厢的内部在预定时间段内设定为清洁区域。
150.附录12
151.在根据附录9的自主移动程序中,该设施设置有自主移动装置在其中停止和等待的待命区域,并且该自主移动程序使计算机:当使与清洁标志相关联的自主移动装置基于该规则移动时,禁止该自主移动装置在与不清洁标志相关联的另一自主移动装置等待所在的相同的待命区域中等待。
152.附录13
153.在根据附录9的自主移动程序中,该设施设置有自主移动装置在其中停止和等待的待命区域,并且该自主移动程序使计算机:在搜索路线时,将与清洁标志相关联的自主移动装置已在其中等待的待命区域在预定时间内设定作为清洁区域。
154.附录14
155.根据附录9的自主移动程序,使计算机:当使与清洁标志相关联的自主移动装置基于该规则移动时,使该自主移动装置远离与不清洁标志相关联的另一自主移动装置预定距离以上进行移动。
156.附录15
157.根据附录9的自主移动程序,使计算机:当自主移动装置与通用标志相关联时,允许自主移动装置进入清洁区域和进入不清洁区域。
158.附录16
159.根据附录9的自主移动程序,使计算机:在搜索路线时,将该设施中的预定区域在预定时间内设定为清洁区域或不清洁区域。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。