1.本发明属于环境治理技术领域,具体涉及一种智能化荒漠生态修复系统。
背景技术:
2.绿色发展理念已经融入社会发展的方方面面,绿色发展已然融入社会发展的基因。作为世界上受土地荒漠化危害最严重的国家之一,我国长期以来非常重视沙地沙漠生态修复治理,而这确是一项长期性、系统性、全局性、整体性的工作。
3.现有技术对于荒漠生态修复的方法主要依靠卫星、飞机等对绿植区进行宏观观察,判断绿植区植被的生长情况。但是这种方法相对滞后,只有当绿植区出现大面积的问题后,才能发现问题并采取补救措施。为了解决上述问题,现有技术一般要求工作人员定时对绿植区或待修复区的土壤进行土壤成份检测和土壤水分含量检测,以判断绿植区内土壤的情况,进而判断植被之后可能的生长情况,或根据待修复区的土壤情况,分析得到该区域事宜的绿植。但是采用工作人员定时对绿植区或待修复区的土壤进行土壤成份检测和土壤水分含量检测的方法,效率较低且在对待修复区进行土壤采集时,很可能出现风险。因此急需一种可以自动根据计划完成巡检和土壤情况采集的系统。
技术实现要素:
4.本发明针对现有技术存在的问题,提供了一种智能化荒漠生态修复系统,包括:设置在监控中心的分析系统和设置在待修复荒漠地区的自动巡检机器人。所述自动巡检机器人通过无线通讯装置与分析系统通讯链接。所述分析系统包括:巡检机器人控制模块、土壤情况分析模块、荒漠生态修复分析模块。所述自动巡检机器人至少包括:摄像机。
5.所述巡检机器人控制模块用于控制自动巡检机器人在目标区域内执行自动巡检。所述自动巡检包括:巡逻路线规划、土壤采集分析指令和土壤水分分析指令。
6.所述土壤情况分析模块通过获取自动巡检机器人发回的土壤成份和土壤水分数据信息,从大数据库中获取目标修复区域的当前土壤情况。
7.所述荒漠生态修复分析模块通过获取土壤情况分析模块的分析结果及自动巡检机器人发回的影像数据信息,从大数据库中获取符合当前区域荒漠生态修复进度的修复计划,或在完成一个区域的荒漠生态修复计划后生成新的目标区域的荒漠生态修复计划。
8.工作过人员根据符合当前区域荒漠生态修复进度的修复计划,或新的目标区域的荒漠生态修复计划对目标区域继续生态修复工作。
9.进一步的,所述自动巡检机器人包括:电池仓和位于电池仓下方的功能仓。所述电池仓顶部设有太阳能发电板,内部设有蓄电池、通讯模块和定位模块,所述太阳能发电板为蓄电池供电,所述蓄电池为通讯模块、定位模块和功能仓中的需电设备供电。所述功能仓底部设有至少2组,每组至少2个驱动仓。所述驱动仓内设有轮子,所述轮子由驱动电机驱动转动,所述驱动电机的控制信号接受端与通讯模块信号线连接。所述驱动电机顶部与第一电控伸缩装置的升缩杆固定。所述功能仓内部固定有至少2个中空滑轨,每个所述中空滑轨顶
部均固定有一个第二电控伸缩装置。所述第二电控伸缩装置的升缩杆与滑杆固定,所述滑杆沿中空滑轨滑动。每个所述滑杆底部均连接有不同功能的功能模块。所述第一电控伸缩装置、第二电控伸缩装置的控制信号接受端与通讯模块信号线连接。
10.进一步的,所述功能模块包括:土壤成份检测功能模块。所述土壤成份检测功能模块包括:土壤成份检测钻头,所述土壤成份检测钻头底部设有土壤土壤收纳仓,且底部侧壁为刀刃型。所述土壤收纳仓顶部设有推板,所述推板与第三电控伸缩装置的伸缩杆固定。所述土壤成份检测钻头一侧通过转轴转动连接有收纳盘。所述收纳盘侧壁固定有1个通过侧翼盘和至少1个收纳侧翼盘。所述收纳盘顶部在转轴位置处同轴设有步进电机。所述步进电机一侧设有拍摄面朝向收纳侧翼盘的土壤成份检测仪。
11.所述通过侧翼盘上在与土壤成份检测钻头对应位置处设有大于等于土壤成份检测钻头截面的土壤成份检测钻头通过孔。
12.所述收纳侧翼盘上固定有收纳盒。所述收纳盒顶端敞口,底端通过电控门封闭。
13.所述第三电控伸缩装置、步进电机、土壤成份检测仪、电控门的信号连接端与通讯模块信号线连接。
14.进一步的,所述土壤成份检测钻头一侧设有第一光接收装置,所述土壤成份检测仪一侧设有第二光接收装置,所述通过侧翼盘上设有第一光发射器,所述收纳侧翼盘上设有第二光发射器。
15.所述第一光接收装置低端面设有第一光接收板,内部设有第一微处理器。所述第一光接收板上矩阵排列有数个第一感光单元,每一个所述第一感光单元均与第一微处理器信号连接。所述第一微处理器接收第一感光单元的信号后经过第一校准分析,向步进电机发送第一校准控制信号。
16.所述第二光接收装置底端面设有第二光接收板,内部设有第二微处理器。所述第二光接收板上矩阵排列有数个第二感光单元,每一个所述第二感光单元均与第二微处理器信号连接。所述第二微处理器接收第二感光单元的信号后经过第二校准分析,向步进电机发送第二校准控制信号。
17.所述第一光发射器、第二光发射器发出的光束与收纳盘中轴线的水平距离均为h1。所述第一光接收板、第二光接收板的板面几何中心与收纳盘中轴线的水平距离均为h2,所述h1和h2相匹配。
18.所述第一微处理器、第二微处理器与通讯模块信号线连接。
19.进一步的,所述第一校准分析为:接收到维持预设第一时间的光信号后,计算接收到该光信号的第一感光单元与预设标定的第一感光单元之间的向量距离l1。所述第一校准控制信号为根据l1得到的与l1反向且数值相等的位移指令。
20.所述第二校准分析为:接收到维持预设第二时间的光信号后,计算接收到该光信号的第二感光单元与预设标定的第二感光单元之间的向量距离l2。所述第二校准控制信号为根据l2得到的与l2反向且数值相等的位移指令。
21.进一步的,所述土壤采集分析指令包括:
22.1)巡检机器人控制模块向第一光发射器发送启动指令,向第二光发射器发送关闭指令,同时控制步进电机带动收纳盘定向缓慢转动。
23.2)当第一光接收装置接收到光信号后,控制步进电机停止转动,并经过第一校准
分析后得到第一校准控制信号。待步进电机执行第一校准控制信号完毕后,巡检机器人控制模块向土壤成份检测功能模块对应的第二电控伸缩装置发送伸出指令,使其推动滑杆及固定在滑杆上的土壤成份检测钻头穿过土壤成份检测钻头通过孔插入土壤中,此时土壤土壤收纳仓中挤压入目标区域土壤。
24.3)巡检机器人控制模块向第二电控伸缩装置发送回收指令,使土壤成份检测钻头回收至通过侧翼盘上方。
25.4)巡检机器人控制模块向第一光发射器发送关闭指令,向标记记号的一个第二光发射器发送开启指令,同时控制步进电机带动收纳盘定向缓慢转动。
26.5)当第一光接收装置接收到光信号后,控制步进电机停止转动,并经过第一校准分析后得到第一校准控制信号。待步进电机执行第一校准控制信号完毕后,巡检机器人控制模块控制第三电控伸缩装置伸出,从而推动推板将土壤土壤收纳仓中收纳的目标区域土壤推至收纳盒中。
27.6)巡检机器人控制模块控制步进电机带动收纳盘定向缓慢转动,至第二光接收装置接收到光信号后,控制步进电机停止转动,并经过第二校准分析后得到第二校准控制信号。
28.7)待步进电机执行第二校准控制信号完毕后,巡检机器人控制模块控制土壤成份检测仪启动,对收纳盒中的土壤进行成份检测,检测结果发送至土壤情况分析模块。
29.进一步的,所述土壤采集分析指令还包括:
30.8)待预设数量的收纳盒装载有目标区域土壤后,巡检机器人控制模块控制其中一个装载有目标区域土壤的收纳侧翼盘上的第二光发射器启动,第一光发射器和其余第二光发射器关闭。
31.9)巡检机器人控制模块步进电机带动收纳盘定向缓慢转动,至第一光接收装置接收到光信号后,控制步进电机停止转动,并经过第一校准分析后得到第一校准控制信号。
32.10)待步进电机执行第一校准控制信号完毕后,巡检机器人控制模块向该收纳盒底部的电控门发送开启指令,使该收纳盒内的目标区域土壤流至功能仓外部,完成该收纳盒的土壤卸载。
33.11)重复步骤8)至10)至全部装载有目标区域土壤的收纳盒均完成土壤卸载。
34.进一步的,所述功能模块包括:水采集功能模块。所述水采集功能模块包括:土壤水含量检测钻头,所述土壤水含量检测钻头底部设有土壤检测仓,且底部侧壁为刀刃型。所述土壤检测仓顶部固定有土壤水含量检测仪,所述土壤水含量检测仪的检测端位于土壤检测仓内部。所述土壤水含量检测仪与通讯模块信号线连接。
35.所述土壤检测仓两侧设有数个风道,每个风道底端均通过互不相同的朝向与土壤检测仓连通,每个风道顶端均通过通风软管与送风总管上的一个出风口连通。所述送风总管与空压机的出风端连通。所述空压机与通讯模块信号线连接。
36.进一步的,所述土壤水分分析指令包括:
37.a.巡检机器人控制模块向水采集功能模块对应的第二电控伸缩装置发送伸出指令,使其推动滑杆及固定在滑杆上的土壤水含量检测钻头插入目标区域土壤中。
38.b.巡检机器人控制模块控制土壤水含量检测仪启动检测,并将检测结果发送至土壤情况分析模块。
39.c.待土壤水含量检测仪完成检测后,巡检机器人控制模块向水采集功能模块对应的第二电控伸缩装置发送回收指令,使土壤水含量检测钻头回收至功能仓内部,并使得土壤检测仓底部开口位于功能仓外部。
40.d.巡检机器人控制模块控制空压机启动,通过风道向土壤检测仓内输送不同朝向的风,进而在土壤检测仓形成高速涡流。一段时间后控制空压机关闭。
41.进一步的,所述巡逻路线规划包括:
42.(一)根据预设程序形成自动巡检机器人的巡检路线和停留检测点。
43.(二)当自动巡检机器人根据指令需要进行移动时,巡检机器人控制模块向第一电控伸缩装置发送伸出指令,第一电控伸缩装置推动驱动电机带动轮子向下运动,当轮子抵押地面后,第一电控伸缩装置方向推动功能仓离开地面。
44.(三)根据巡检路线,基于定位模块定位,巡检机器人控制模块通过控制各驱动电机的转速,带动巡检机器人沿巡检路线移动至停留检测点。
45.(四)到达停留检测点后,巡检机器人控制模块向第一电控伸缩装置发送回收指令,使得功能仓下降并贴合地面。
46.(五)待检测完毕后,重复步骤(一)至(四),至巡检机器人完成当前巡检路线巡逻和在停留检测点的检测。
47.本发明至少具有以下优点之一:
48.1.本发明自动巡检机器人可以根据分析系统的巡检机器人控制模块完成自动的按巡检路线巡检、在要求的采集点进行土壤采集,并就地完成土壤成分分析、土壤水分分析,从而显著减少了人员巡检的频次。
49.2.本发明可以通过太阳能发电板对蓄电池进行充电,从而极大延长了一次自动巡检机器人外出巡检的工作时间。
50.3.本发明分析系统基于获取的土壤成分、土壤水分,基于大数据分析,获得符合当前区域荒漠生态修复进度的修复计划,或在完成一个区域的荒漠生态修复计划后生成新的目标区域的荒漠生态修复计划。工作过人员根据符合当前区域荒漠生态修复进度的修复计划,或新的目标区域的荒漠生态修复计划对目标区域继续生态修复工作。显著提高了荒漠生态修复的效率。
附图说明
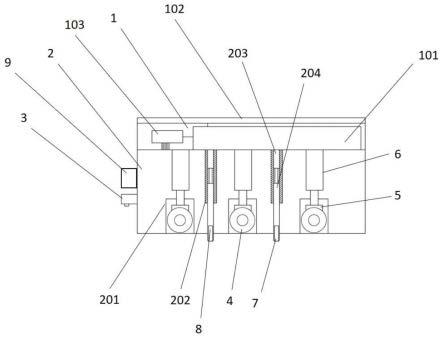
51.图1所示为本发明自动巡检机器人的结构示意图。
52.图2所示为本发明土壤成份检测功能模块的结构示意图。
53.图3所示为本发明水采集功能模块的结构示意图。
具体实施方式
54.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,本发明所述竖直、水平,仅为主体部件处于水平或竖直位置时,部件上相应其他组件相对部件主体的相对位置,并非任意状态下的绝对竖直或水平位置。
55.实施例1
56.一种智能化荒漠生态修复系统,包括:设置在监控中心的分析系统和设置在待修复荒漠地区的自动巡检机器人。所述自动巡检机器人通过无线通讯装置与分析系统通讯链接。所述分析系统包括:巡检机器人控制模块、土壤情况分析模块、荒漠生态修复分析模块。所述自动巡检机器人至少包括:摄像机9。
57.所述巡检机器人控制模块用于控制自动巡检机器人在目标区域内执行自动巡检。所述自动巡检包括:巡逻路线规划、土壤采集分析指令和土壤水分分析指令。
58.所述土壤情况分析模块通过获取自动巡检机器人发回的土壤成份和土壤水分数据信息,从大数据库中获取目标修复区域的当前土壤情况。
59.所述荒漠生态修复分析模块通过获取土壤情况分析模块的分析结果及自动巡检机器人发回的影像数据信息,从大数据库中获取符合当前区域荒漠生态修复进度的修复计划,或在完成一个区域的荒漠生态修复计划后生成新的目标区域的荒漠生态修复计划。
60.工作过人员根据符合当前区域荒漠生态修复进度的修复计划,或新的目标区域的荒漠生态修复计划对目标区域继续生态修复工作。
61.所述大数据库时根据历年荒漠修复工作获取的数据构建的,至少包括有:基于土壤成份和土壤水分数据信息,对应该标样的土壤情况信息的对照表。以及土壤情况信息、植被颜色和形态、土壤表面颜色信息对应荒漠修复进度的对照表、历年荒漠生态修复计划。所述生成新的目标区域的荒漠生态修复计划的方法为:根据总体修复计划,在完成一个区域的修复工作后,从大数据库中获取下一个目标区域的地理、土壤信息,并对照历史修复计划,选择最接近的地理、土壤信息条件,得到该目标区域的修复计划。工作人员根据系统生成的修复计划,可依照权限进行调整或修改。
62.本发明主要依靠巡检机器人控制模块控制自动巡检机器人对修复区域进行长时间的在外巡检,并根据计划信息,实时获取目标采样点的土壤成分和土壤水分信息,进而使得土壤情况分析模块可以根据获得的目标采样点的土壤成分和土壤水分信息,从大数据库中获取对应的目标地区的土壤情况信息,进而从大数据库总获取当前目标区域的修复进度。该系统不仅通过自动巡检机器人实现了实时的就地的土壤成分分析、土壤水分分析,从而显著减少了人员巡检的频次,显著降低了由于人员长时间、多频次外出荒漠地区而存在的风险,同时自动巡检机器人可长时间维持外出巡检状态,显著提高了工作人员获取目标地区土壤信息的效率,实现对目标地区土壤信息的有效监控,提前规避对植被生长不利的情况,显著降低了修复区域植被的死亡率,从而提高了荒漠修复效率。而且通过大数据库进行土壤情况信息和土壤修复进度的分析,可以极大降低人分分析的误差,并显著提高分析效率。本系统在保障荒漠修复工作人员人生安全的情况下,显著提高了荒漠修复的效率。
63.实施例2
64.基于实施例1所述智能化荒漠生态修复系统,如图1所示,所述自动巡检机器人包括:电池仓1和位于电池仓1下方的功能仓2。所述电池仓1顶部设有太阳能发电板102,内部设有蓄电池101、通讯模块103和定位模块,所述太阳能发电板102为蓄电池101供电,所述蓄电池101为通讯模块103、定位模块和功能仓2中的需电设备供电。由于荒漠地区日照时间充足,采用太阳能发电板 102在白天实时为蓄电池101供电,可极大延长自动巡检自己人一次外出的工作时间,有时还可以在蓄电池101电力足够时,进行夜间应急巡检。
65.所述功能仓2底部设有至少2组,每组至少2个驱动仓201。所述驱动仓 201内设有
轮子4,所述轮子4由驱动电机5驱动转动,所述驱动电机5的控制信号接受端与通讯模块103信号线连接。所述驱动电机5顶部与第一电控伸缩装置6的升缩杆固定。所述功能仓2部固定有至少2个中空滑轨202,每个所述中空滑轨202顶部均固定有一个第二电控伸缩装置203。所述第二电控伸缩装置 203的升缩杆与滑杆204固定,所述滑杆204沿中空滑轨202滑动。每个所述滑杆204底部均连接有不同功能的功能模块。所述第一电控伸缩装置6、第二电控伸缩装置203的控制信号接受端与通讯模块103信号线连接。
66.所述巡逻路线规划包括:
67.(一)根据预设程序形成自动巡检机器人的巡检路线和停留检测点。
68.(二)当自动巡检机器人根据指令需要进行移动时,巡检机器人控制模块向第一电控伸缩装置6发送伸出指令,第一电控伸缩装置6推动驱动电机5带动轮子4向下运动,当轮子4抵押地面后,第一电控伸缩装置6方向推动功能仓2离开地面。
69.(三)根据巡检路线,基于定位模块定位,巡检机器人控制模块通过控制各驱动电机5的转速,带动巡检机器人沿巡检路线移动至停留检测点。
70.(四)到达停留检测点后,巡检机器人控制模块向第一电控伸缩装置6发送回收指令,使得功能仓2下降并贴合地面。
71.(五)待检测完毕后,重复步骤(一)至(四),至巡检机器人完成当前巡检路线巡逻和在停留检测点的检测。
72.将轮子4、驱动电机5、功能模块采用可收缩的形式,在非工作时收藏在功能仓2内,在工作时伸出功能仓2外进行工作。该设置可有效保护轮子4、驱动电机5、功能模块,避免长时间暴露在小队恶劣的荒漠环境中对轮子4、驱动电机5、功能模块造成不必要的损伤或损耗,有效延长了自动巡检机器人的使用寿命、且提高了巡检机器人单次玩出巡检的最大时限。
73.为了保障自动巡检机器人巡检过程中的轮子4的运行安全,在自动巡检机器人外壁前端安装有朝向底面的温度传感器3,所述温度传感器3通过通讯模块 103与巡检机器人控制模块信号连接。
74.此时巡检机器人控制根据接收的温度传感器3发回的实时地表温度,判断:当实时地表温度超出预设温度警戒值后,停止自动巡检机器人的自动巡检,收回轮子4,等待地面温度降低至安全阈值后继续进行巡检。
75.实施例3
76.基于实施例2所述智能化荒漠生态修复系统,如图2所示,所述功能模块包括:土壤成份检测功能模块7。所述土壤成份检测功能模块7包括:土壤成份检测钻头713,所述土壤成份检测钻头713底部设有土壤土壤收纳仓701,且底部侧壁为刀刃型。所述土壤收纳仓701顶部设有推板702,所述推板702与第三电控伸缩装置703的伸缩杆固定。所述土壤成份检测钻头713一侧通过转轴710 转动连接有收纳盘704。所述收纳盘704侧壁固定有1个通过侧翼盘706和至少 1个收纳侧翼盘705。所述收纳盘704顶部在转轴710位置处同轴设有步进电机 708。所述步进电机708一侧设有拍摄面朝向收纳侧翼盘705的土壤成份检测仪 709。
77.所述通过侧翼盘706上在与土壤成份检测钻头713对应位置处设有大于等于土壤成份检测钻头713截面的土壤成份检测钻头通过孔7061。
78.所述收纳侧翼盘705上固定有收纳盒707。所述收纳盒707顶端敞口,底端通过电控
门714封闭。
79.所述第三电控伸缩装置703、步进电机708、土壤成份检测仪709、电控门 714的信号连接端与通讯模块103信号线连接。所述土壤成份检测仪709为基于 xrd原理的光学检测仪,其光学探测面朝向收纳盒707。
80.所述土壤成份检测钻头713一侧设有第一光接收装置711,所述土壤成份检测仪709一侧设有第二光接收装置715,所述通过侧翼盘706上设有第一光发射器712,所述收纳侧翼盘705上设有第二光发射器716。
81.所述第一光接收装置711低端面设有第一光接收板,内部设有第一微处理器。所述第一光接收板上矩阵排列有数个第一感光单元,每一个所述第一感光单元均与第一微处理器信号连接。所述第一微处理器接收第一感光单元的信号后经过第一校准分析,向步进电机708发送第一校准控制信号。
82.所述第二光接收装置715底端面设有第二光接收板,内部设有第二微处理器。所述第二光接收板上矩阵排列有数个第二感光单元,每一个所述第二感光单元均与第二微处理器信号连接。所述第二微处理器接收第二感光单元的信号后经过第二校准分析,向步进电机708发送第二校准控制信号。
83.所述第一光发射器712、第二光发射器716发出的光束与收纳盘704中轴线的水平距离均为h1。所述第一光接收板、第二光接收板的板面几何中心与收纳盘704中轴线的水平距离均为h2,所述h1和h2相匹配。
84.所述第一微处理器、第二微处理器与通讯模块103信号线连接。
85.所述第一校准分析为:接收到维持预设第一时间的光信号后,计算接收到该光信号的第一感光单元与预设标定的第一感光单元之间的向量距离l1。所述第一校准控制信号为根据l1得到的与l1反向且数值相等的位移指令。
86.所述第二校准分析为:接收到维持预设第二时间的光信号后,计算接收到该光信号的第二感光单元与预设标定的第二感光单元之间的向量距离l2。所述第二校准控制信号为根据l2得到的与l2反向且数值相等的位移指令。
87.所述土壤采集分析指令包括:
88.1)巡检机器人控制模块向第一光发射器712发送启动指令,向第二光发射器716发送关闭指令,同时控制步进电机708带动收纳盘704定向缓慢转动。
89.2)当第一光接收装置711接收到光信号后,控制步进电机708停止转动,并经过第一校准分析后得到第一校准控制信号。待步进电机708执行第一校准控制信号完毕后,巡检机器人控制模块向土壤成份检测功能模块7对应的第二电控伸缩装置203发送伸出指令,使其推动滑杆204及固定在滑杆204上的土壤成份检测钻头713穿过土壤成份检测钻头通过孔7061插入土壤中,此时土壤土壤收纳仓701中挤压入目标区域土壤。
90.3)巡检机器人控制模块向第二电控伸缩装置203发送回收指令,使土壤成份检测钻头713回收至通过侧翼盘706上方。
91.4)巡检机器人控制模块向第一光发射器712发送关闭指令,向标记记号的一个第二光发射器716发送开启指令,同时控制步进电机708带动收纳盘704 定向缓慢转动。
92.5)当第一光接收装置711接收到光信号后,控制步进电机708停止转动,并经过第一校准分析后得到第一校准控制信号。待步进电机708执行第一校准控制信号完毕后,巡检
机器人控制模块控制第三电控伸缩装置703伸出,从而推动推板702将土壤土壤收纳仓701中收纳的目标区域土壤推至收纳盒707中。
93.6)巡检机器人控制模块控制步进电机708带动收纳盘704定向缓慢转动,至第二光接收装置715接收到光信号后,控制步进电机708停止转动,并经过第二校准分析后得到第二校准控制信号。
94.7)待步进电机708执行第二校准控制信号完毕后,巡检机器人控制模块控制土壤成份检测仪709启动,对收纳盒707中的土壤进行成份检测,检测结果发送至土壤情况分析模块。
95.采用上述机构和控制方法,可以实现自动巡检机器人根据控制指令,随时随地进行土壤采集、土壤成分检测的工作,且在土壤采集和土壤成分检测过程中,通过光学定位校准,使得各机构的配合动作更为准确,避免机构配合动作时由于错位导致的碰撞损伤或检测不准确的问题。
96.实施例4
97.基于实施例3所述智能化荒漠生态修复系统,所述土壤采集分析指令还包括:
98.8)待预设数量的收纳盒707装载有目标区域土壤后,巡检机器人控制模块控制其中一个装载有目标区域土壤的收纳侧翼盘705上的第二光发射器716启动,第一光发射器712和其余第二光发射器716关闭。
99.9)巡检机器人控制模块步进电机708带动收纳盘704定向缓慢转动,至第一光接收装置715接收到光信号后,控制步进电机708停止转动,并经过第一校准分析后得到第一校准控制信号。
100.10)待步进电机708执行第一校准控制信号完毕后,巡检机器人控制模块向该收纳盒707底部的电控门714发送开启指令,使该收纳盒707内的目标区域土壤流至功能仓2外部,完成该收纳盒707的土壤卸载。
101.11)重复步骤8)至10)至全部装载有目标区域土壤的收纳盒707均完成土壤卸载。
102.该设置可以在对一定数量的土壤完成采集和成分检测后,将采集装载的土壤卸除,从而腾出新的空余的收纳盒707,从而实现对收纳盒707的重复利用,提高巡检机器人一次外出可以进行的土壤采集和成分检测数量。
103.实施例5
104.基于实施例2所述智能化荒漠生态修复系统,所述功能模块包括:水采集功能模块8。如图3所示,所述水采集功能模块8包括:土壤水含量检测钻头806,所述土壤水含量检测钻头806底部设有土壤检测仓801,且底部侧壁为刀刃型。所述土壤检测仓801顶部固定有土壤水含量检测仪802,所述土壤水含量检测仪802的检测端位于土壤检测仓801内部。所述土壤水含量检测仪802与通讯模块103信号线连接。
105.所述土壤检测仓801两侧设有数个风道804,每个风道804底端均通过互不相同的朝向与土壤检测仓801连通,每个风道804顶端均通过通风软管805与送风总管803上的一个出风口8031连通。所述送风总管803与空压机的出风端连通。所述空压机与通讯模块103信号线连接。
106.所述土壤水分分析指令包括:
107.a.巡检机器人控制模块向水采集功能模块8对应的第二电控伸缩装置203 发送伸
出指令,使其推动滑杆204及固定在滑杆204上的土壤水含量检测钻头 806插入目标区域土壤中。
108.b.巡检机器人控制模块控制土壤水含量检测仪802启动检测,并将检测结果发送至土壤情况分析模块。
109.c.待土壤水含量检测仪802完成检测后,巡检机器人控制模块向水采集功能模块8对应的第二电控伸缩装置203发送回收指令,使土壤水含量检测钻头806 回收至功能仓2内部,并使得土壤检测仓801底部开口位于功能仓2外部。
110.d.巡检机器人控制模块控制空压机启动,通过风道804向土壤检测仓801 内输送不同朝向的风,进而在土壤检测仓801形成高速涡流。一段时间后控制空压机关闭。
111.采用上述机构和控制方式,可以实现自动巡检机器人根据控制指令,随时随地进行土壤水分检测的工作,且在土壤水分检测完成后,通过吹入土壤检测仓801的高速涡流,对土壤检测仓801内以及土壤水含量检测仪802的检测部分进行清理,清楚残留的土壤,避免下次检测时受到之前检测土壤的污染,导致的检测不准确等问题。
112.应该注意到并理解,在不脱离本发明权利要求所要求的精神和范围的情况下,能够对上述详细描述的本发明做出各种修改和改进。因此,要求保护的技术方案的范围不受所给出的任何特定示范教导的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
