1.本发明涉及自动驾驶技术领域,尤其涉及一种车辆变道模型的构建方法及装置。
背景技术:
2.自主变道(automatic lane change,alc)是自动驾驶技术中的核心技术之一。通过自主变道技术,车辆可以在无驾驶员干预的条件下,自主完成车辆变道并线行为,从而大大提高车辆在自动驾驶的行驶效率。车辆自主变道的性能很大程度上取决于自主变道策略的优劣,优质的自主变道策略可以在合适的时间和空间,“拟人化”地产生变道意图,为自主变道的执行做准备。
3.但是,现有的自主变道策略是根据预先构建的变道决策模型生成的,而变道决策模型多是采用大量的历史驾驶模拟数据训练得到的。这样,不同车辆中所使用的变道决策模型的区别较小,这使得不同车辆在自主变道时的决策风格相近,自动驾驶的“拟人化”程度较低,乘客的乘坐体验感较差。
技术实现要素:
4.本发明提供一种车辆变道模型的构建方法及装置,解决了车辆在自动驾驶过程中的“拟人化”程度较低,乘客的乘坐体验感较差的问题。
5.为达到上述目的,本发明采用如下技术方案:
6.第一方面,本发明提供一种车辆变道模型的构建方法,该方法包括:
7.获取车辆在手动驾驶场景中的m组变道数据,每组变道数据用于指示车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数;
8.根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型;
9.根据第一决策树模型和预存的第二决策树模型,确定融合变道模型;融合变道模型用于车辆在自动驾驶场景中的变道决策。
10.在一种可能的实现方式中,根据第一决策树模型和预存的第二决策树模型,确定融合变道模型,包括:根据第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值;根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序;根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型。
11.在一种可能的实现方式中,根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型,包括:根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序;根据每种行驶属性的至少一个分裂值,以及每种行
驶属性的每个分裂值的位序,确定第一决策树模型。
12.在一种可能的实现方式中,根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定第一决策树模型,包括:当每种行驶属性对应一个第一目标分裂值时,根据每种行驶属性的第一目标分裂值,以及每种行驶属性的第一目标分裂值的位序,确定第一决策树模型;当n种行驶属性中存在至少一种行驶属性对应多个分裂值时,根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定初始决策树模型,并对初始决策树模型进行剪枝处理,得到第一决策树模型,第一决策树模型包括的每种行驶属性的第一目标分裂值为相应的行驶属性的至少一个分裂值中的一个。
13.在一种可能的实现方式中,根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,包括:根据每种行驶属性对应的预设范围,以及预存的分裂算法,确定每种行驶属性对应的多个备选分裂值;根据每组变道数据包括的每种行驶属性的值,计算每种行驶属性对应的每个备选分裂值的基尼系数;根据每种行驶属性对应的每个备选分裂值的基尼系数的大小,确定每种行驶特征的至少一个分裂值,以及每种行驶属性的每个分裂值的位序。
14.在一种可能的实现方式中,每组变道数据还包括天气属性的值,m组变道数据的天气属性的值相同;相应的,第二决策树模型为在与m组变道数据的天气属性的值的情况下得到的。
15.在一种可能的实现方式中,在确定融合变道模型之后,车辆变道模型的构建方法还包括:继续获取车辆在手动驾驶场景中的变道数据;在继续获取的变道数据的总数据量满足预设条件时,根据满足预设条件的变道数据确定新的第一决策树模型;根据新的第一决策树模型和融合变道模型,确定新的融合变道模型。
16.第二方面,本发明提供一种车辆变道模型的构建装置,包括:
17.获取模块,用于获取车辆在手动驾驶场景中的m组变道数据,每组变道数据用于指示车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数;
18.第一确定模块,用于根据获取模块获取的每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型;
19.第二确定模块,用于根据第一确定模块确定的第一决策树模型和预存的第二决策树模型,确定融合变道模型;融合变道模型用于车辆在自动驾驶场景中的变道决策。
20.在一种可能的实现方式中,第二确定模块,具体用于:根据第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值;根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序;根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型。
21.在一种可能的实现方式中,第一确定模块,具体用于:根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序;根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定第一决策树模型。
22.在一种可能的实现方式中,第一确定模块,具体用于:当每种行驶属性对应一个第一目标分裂值时,根据每种行驶属性的第一目标分裂值,以及每种行驶属性的第一目标分裂值的位序,确定第一决策树模型;当n种行驶属性中存在至少一种行驶属性对应多个分裂值时,根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定初始决策树模型,并对初始决策树模型进行剪枝处理,得到第一决策树模型,第一决策树模型包括的每种行驶属性的第一目标分裂值为相应的行驶属性的至少一个分裂值中的一个。
23.在一种可能的实现方式中,第一确定模块,具体用于:根据每种行驶属性对应的预设范围,以及预存的分裂算法,确定每种行驶属性对应的多个备选分裂值;根据每组变道数据包括的每种行驶属性的值,计算每种行驶属性对应的每个备选分裂值的基尼系数;根据每种行驶属性对应的每个备选分裂值的基尼系数的大小,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序。
24.在一种可能的实现方式中,每组变道数据还包括天气属性的值,m组变道数据的天气属性的值相同;相应的,第二决策树模型为在与m组变道数据的天气属性的值的情况下得到的。
25.在一种可能的实现方式中,车辆变道模型的构建装置还包括第三确定模块和决策模块;获取模块还用于,在自动驾驶场景中,获取车辆当前的目标天气属性的值和每种目标行驶属性的值;第三确定模块用于,确定与目标天气属性的值对应的目标融合变道模型;决策模块用于,根据每种目标行驶属性的值,采用目标融合变道模型确定车辆是否进行变道。
26.在一种可能的实现方式中,获取模块还用于,继续获取车辆在手动驾驶场景中的变道数据;第一确定模块还用于,在继续获取的变道数据的总数据量满足预设条件时,根据满足预设条件的变道数据确定新的第一决策树模型;第二确定模块还用于,根据新的第一决策树模型和融合变道模型,确定新的融合变道模型。
27.第三方面,本发明提供一种变道决策方法,其特征在于,包括:
28.在自动驾驶场景中,获取车辆当前的目标变道数据,目标变道数据包括目标天气属性的值和n种目标行驶属性中每种目标行驶属性的值,n为大于1的整数;
29.确定与目标天气属性的值对应的目标融合变道模型,目标融合变道模型是根据第一决策树模型和预存的第二决策树模型得到的,第一决策树模型是根据车辆在手动驾驶场景中的m组变道数据得到的,m为大于1的整数;
30.根据每种目标行驶属性的值,采用目标融合变道模型确定车辆是否进行变道。
31.第四方面,本发明提供一种变道决策装置,其特征在于,包括:
32.获取模块,用于在自动驾驶场景中,获取车辆当前的目标变道数据,目标变道数据包括目标天气属性的值和n种目标行驶属性中每种目标行驶属性的值,n为大于1的整数;
33.第三确定模块,用于确定与获取模块获取的目标天气属性的值对应的目标融合变道模型,目标融合变道模型是根据第一决策树模型和预存的第二决策树模型得到的,第一决策树模型是根据车辆在手动驾驶场景中的m组变道数据得到的,m为大于1的整数;
34.决策模块,用于根据获取模块获取的每种目标行驶属性的值,采用第三确定模块确定的目标融合变道模型确定车辆是否进行变道。
35.第五方面,本发明提供一种车辆,其特征在于,车辆包括:处理器和存储器;存储器用于存储计算机程序代码,计算机程序代码包括计算机指令;当处理器执行计算机指令时,
车辆执行如第一方面及其任一种可能的实现方式的车辆变道模型的构建方法,或执行如第三方面及其任一种可能的实现方式的变道决策方法。
36.第六方面,本发明提供一种计算机可读存储介质,其上存储有计算机指令,当计算机指令在计算机设备上运行时,使得计算机设备执行如第一方面及其任一种可能的实现方式的车辆变道模型的构建方法,或执行如第三方面及其任一种可能的实现方式的变道决策方法。
37.第七方面,本发明提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在计算机设备上运行时,使得计算机设备执行如第一方面及其任一种可能的实现方式的车辆变道模型的构建方法,或执行如第三方面及其任一种可能的实现方式的变道决策方法。
38.本发明实施例提供的车辆变道模型的构建方法,车辆获取车辆在手动驾驶场景中的m组变道数据,其中,每组变道数据用于指示所述车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数,并根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型,且根据第一决策树模型和预存的第二决策树模型,确定融合变道模型,融合变道模型用于车辆在自动驾驶场景中的变道决策。本发明通过融合第一决策树模型和预存的第二决策树模型得到融合变道模型,使得车辆在使用融合变道模型进行自主变道时的决策风格更加接近于车辆手动驾驶时的驾驶风格,从而提高了车辆自动驾驶的“拟人化”程度,提升了车辆自动驾驶过程中乘客的体验感。
附图说明
39.图1为本发明实施例提供的一种车辆变道模型的构建方法的应用场景示意图;
40.图2为本发明实施例提供的一种车辆变道模型的构建方法的流程图之一;
41.图3为本发明实施例提供的一种决策树模型的结构示意图之一;
42.图4为本发明实施例提供的一种决策树模型的结构示意图之二;
43.图5为本发明实施例提供的一种车辆变道模型的构建方法的流程图之二;
44.图6为本发明实施例提供的一种车辆变道模型的构建装置的结构示意图;
45.图7为本发明实施例提供的一种变道决策方法的流程图;
46.图8为本发明实施例提供的一种变道决策装置的结构示意图。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.以下,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本公开实施例的描述中,除非另有说明,“多个”的含义是两个或两个以上。另外,“基于”或“根据”的使用意味着开放和包容性,因为“基于”或“根据”一个或多个所述条件或值的过程、步骤、计算或其他动作在实践中可以基于额外条件或超出所述的值。
49.为了解决车辆在自动驾驶过程中的“拟人化”程度较低,乘客的乘坐体验感较差的问题,本发明实施例提供了一种车辆变道模型的构建方法及装置,计算机设备获取车辆在手动驾驶场景中的m组变道数据,其中,每组变道数据用于指示所述车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数,并根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型,且根据第一决策树模型和预存的第二决策树模型,确定融合变道模型,融合变道模型用于车辆在自动驾驶场景中的变道决策。本发明通过融合第一决策树模型和预存的第二决策树模型得到融合变道模型,使得车辆在使用融合变道模型进行自主变道时的决策风格更加接近于车辆手动驾驶时的驾驶风格,从而提高了车辆自动驾驶的“拟人化”程度,提升了车辆自动驾驶过程中乘客的体验感。
50.图1为本发明实施例提供的一种车辆变道模型的构建方法的应用场景示意图。如图1所示,该应用场景可以包括:车辆10、计算机设备20、目标车辆30。
51.在车辆10的手动驾驶过程中,每当车辆10向一侧车道变道时,车辆10中的传感器可以获取此刻车辆10的一组变道数据,例如,一组变道数据可以包括车辆10与周围目标车辆30的相对距离和相对速度等数据,并向计算机设备20发送该组变道数据。计算机设备20在获取到的变道数据的总数据量达到预设条件时,根据总的变道数据,确定第一决策树模型,再将第一决策树模型和预存的第二决策树模型进行融合,得到融合变道模型,且向车辆10发送该融合变道模型,以便于车辆10在后续的自动驾驶场景中的变道决策。
52.在另一种可能的应用场景中,可以仅包括车辆10和目标车辆30。在该场景下,在车辆10的手动驾驶过程中,每当车辆10向一侧车道变道时,车辆10中的传感器可以获取此刻车辆10的一组变道数据,例如,一组变道数据可以包括车辆10与周围目标车辆30的相对距离和相对速度等数据,车辆10在获取到的变道数据的总数据量达到预设条件时,根据总的变道数据,确定第一决策树模型,再将第一决策树模型和预存的第二决策树模型进行融合,得到融合变道模型,以便于车辆10在后续的自动驾驶场景中的变道决策。
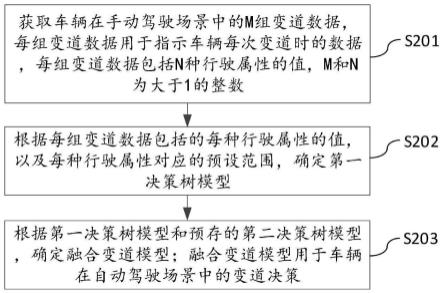
53.图2为本发明实施例提供的一种车辆变道模型的构建方法的流程示意图。如图2所示,车辆变道模型的构建方法可以包括以下步骤s201-步骤s203。
54.s201、获取车辆在手动驾驶场景中的m组变道数据,每组变道数据用于指示车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数。
55.其中,行驶属性可以包括但不限于车辆与周围目标车辆的相对距离与速度,例如,车辆与本车道前车的相对速度v
sf
、车辆与本车道前车的相对距离d
sf
、车辆与目标车道前车的相对速度v
tf
、车辆与目标车道前车的相对距离d
tf
、车辆与目标车道后车的相对速度v
td
、车辆与目标车道后车的相对距离d
td
。另外,行驶属性还可以包括压速比ve,压速比=(目标车速-当前车速)/目标车速,其中,目标车速可以是车辆在自动驾驶场景中的目标行驶车速。可以理解的是,在手动驾驶场景中,车辆每次变道时均会对应产生一组当前时刻的变道数据。
56.在一种可能的实现方式中,计算机设备可以获取车辆在手动驾驶场景中的m组变道数据,每组变道数据用于指示车辆每次变道时的数据,每组变道数据包括n种行驶属性的
值,m和n为大于1的整数。
57.在另一种可能的实现方式中,每组变道数据还可以包括天气属性的值,天气属性的值用于表示变道时的天气状况,例如雨天、雪天或雾天等。可以理解的是,上述m组变道数据的天气属性的值是相同的。
58.s202、根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型。
59.其中,决策树模型是一种树形结构的模型,其每个内部节点表示一个属性上的测试,每个分支代表一个测试输出,每个叶节点代表一种类别。决策树模型通常以最大收益期望值或最低期望成本作为决策准则,通过图解的方式求解在不同条件下各类方案的效益值,然后通过比较效益值做出决策。
60.本实施例中的第一决策树模型的生成过程,本质是将所有的行驶属性按照一定标准进行重要度排序,得到每个行驶属性位序,并且确定出每个行驶属性的分裂值,分裂值为行驶属性节点分裂时的临界值。可以理解的是,计算机设备可以根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,通过遍历每个行驶属性的取值范围内的所有备选分裂值,分别计算其重要度,并根据所有备选分裂值的重要度的大小确定出重要度较高的若干分裂值及其相应的位序,从而确定第一决策树模型。重要度可以由基尼系数来表示,基尼系数越小,则重要度越高,重要度还可以由信息增益来表示,信息增益越大,则重要度越高。
61.具体的,车辆可以根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,并根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定第一决策树模型。
62.示例性的,在确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序时,计算机设备可以根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,计算每种行驶属性包括的每个备选分裂值的基尼系数,根据每种行驶属性包括的每个备选分裂值的基尼系数的大小,确定每种行驶特征的至少一个分裂值,以及每种行驶属性的每个分裂值的位序。可以理解的是,基尼系数可以衡量一个行驶属性对于一组变道数据分类的纯度,具有较小基尼系数的行驶属性,代表该行驶属性对于一组变道数据的分类能力更强,对于被决策的行为更有影响,更具有参考性,应优先用于决策判断。其中,基尼系数可以由如下公式(1)和公式(2)计算:
[0063][0064]
gini(d,a)=|d1|/|d|*gini(d1) |d2|/|d|*gini(d2);
ꢀꢀ
公式(2)
[0065]
其中,k为基于某一个行驶属性的分裂值分类后的所有类别的数量,pk为第k个类别发生的概率,gini(d,a)为基于行驶属性a在变道数据d中的基尼系数,d1和d2为基于行驶属性a,变道数据被分成的两类。
[0066]
在一种可能的实现方式中,如图3所示,当每种行驶属性对应一个第一目标分裂值时,车辆可以根据每种行驶属性的第一目标分裂值,以及每种行驶属性的第一目标分裂值的位序,确定出如图3所示的第一决策树模型。
[0067]
在另一种可能的实现方式中,如图4所示,当n种行驶属性中存在至少一种行驶属性对应多个分裂值时,车辆可以根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定出如图4所示的初始决策树模型。由于决策树模型的建立过程完全是依赖于训练样本(m组变道数据),因此该初始决策树模型对训练样本能够产生完美的拟合效果,但这样的初始决策树模型对于测试样本来说过于庞大而复杂,可能产生较高的分类错误率。这种现象就称为过拟合,基于此,车辆还可以对初始决策树模型进行剪枝处理,得到第一决策树模型,从而解决过拟合问题。可以理解的是,第一决策树模型包括的每种行驶属性的第一目标分裂值可以为相应的行驶属性的至少一个分裂值中的一个。
[0068]
示例性的,剪枝处理可以为前剪枝(又称为预剪枝)。由于所有决策树模型的构建方法,都是在无法进一步降低系统熵的情况下才会停止创建分支,所以,为了避免决策树模型过拟合,可以提前设定停止条件,例如:子树上的样本数据都已经归属于同一个类别;达到最大树深度;子树节点的样本数量小于某个阈值,或者小于一定的比例;子树节点再按照最优划分标准切分,其子树的样本数量小于某个阈值,或者小于一定的比例;最优划分增益小于某个阈值,如误差值等。这些方法在某种程度均可以让决策树提前停止生长,防止树分支无限制生成,从而避免一定程度上的过拟合。
[0069]
示例性的,剪枝处理还可以为后剪枝,即在已生成过拟合决策树上进行剪枝,可以得到简化版的剪枝决策树。后剪枝方法有多种,例如,错误率降低剪枝(reduced-errorpruning,rep),该剪枝方法考虑将每个内节点均作为修剪的候选对象,如果剪去某个节点之后的决策树在验证集上的误差率没有变大的话,则删除该节点。否则保留,反复进行上述操作,直至遍历所有内节点。又例如,悲观剪枝(pessimistic errorpruning,pep),该方法是根据剪枝前后的错误率来判定子树的修剪,如果剪枝后的该单一节点的误判率要小于剪枝前以该节点为根节点的子树的误判率与误判率的标准差之和的话,则对该节点进行剪枝操作,否则保留该节点。又例如,代价复杂度(cost-complexity pruning,ccp),该方法为任意子树t
t
定义了代价和复杂度,以及一个衡量代价与复杂度之间关系的参数a。代价指的是在剪枝过程中因子树t
t
被叶节点替代而增加的错分样本,复杂度则表示剪枝后子树t
t
减少的叶节点树,a则表示剪枝后树的复杂度降低程度与代价间的关系,其取值范围为非零正实数,且对于任意内部节点来说当a满足下列公式(3)时,其剪枝前后的总损失不变,也即达到一种复杂度的降低与错分率的上升的均衡状态。
[0070]
a=(c(t)-c(t
t
))/(|t
t
|-1);
ꢀꢀ
公式(3)
[0071]
其中,c(t)为节点的预测误差,c(t
t
)为子树t
t
的预测误差,|t
t
|为子树t
t
的节点个数。基于上述公式,从下到上计算每一个非叶节点的a值,然后每一次都剪掉具有最小a值的子树,从而得到一系列的子树序列,最后基于验证集上的误差率,在子树序列中选出最佳的决策树。
[0072]
可以理解的是,由于每组变道数据还可以包括天气属性的值,m组变道数据的天气属性的值相同,因此,车辆确定出的第一决策树模型可以指示在特定天气状况下,车辆在手动驾驶时的变道决策风格。也就是说,车辆可以针对手动驾驶场景中获取到的变道数据,根据每组变道数据中的天气属性的值进行分类存储,基于此,在每种天气属性下,车辆均可以确定出与天气属性对应的第一决策树模型,从而用以指示不同天气情况下车辆在手动驾驶场景中的变道决策风格。
[0073]
s203、根据第一决策树模型和预存的第二决策树模型,确定融合变道模型;融合变道模型用于车辆在自动驾驶场景中的变道决策。
[0074]
其中,第二决策树模型可以是基于大量的驾驶模拟数据或历史驾驶数据训练得到的变道决策模型。第二决策树模型可以为在与m组变道数据的天气属性的值的情况下得到的。
[0075]
具体的,车辆可以根据第一决策树模型和预存的第二决策树模型,通过模型的融合思想来确定融合变道模型,融合变道模型可以用于车辆在自动驾驶场景中的变道决策。
[0076]
本实施例中,车辆获取车辆在手动驾驶场景中的m组变道数据,其中,每组变道数据用于指示所述车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数,并根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型,且根据第一决策树模型和预存的第二决策树模型,确定融合变道模型,融合变道模型用于车辆在自动驾驶场景中的变道决策。本实施例通过融合第一决策树模型和预存的第二决策树模型得到融合变道模型,使得车辆在使用融合变道模型进行自主变道时的决策风格更加接近于车辆手动驾驶时的驾驶风格,从而提高了车辆自动驾驶的“拟人化”程度,提升了车辆自动驾驶过程中乘客的体验感。
[0077]
可选的,在上述实施例的基础上,结合图2,如图5所示,上述步骤s203还包括:
[0078]
s501、根据第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值。
[0079]
可以理解的是,当同一个行驶属性在第一决策树模型和第二决策树模型中中分别有不同的目标分裂值时,车辆可以对目标分裂值进行融合。
[0080]
具体的,车辆可以根据第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值。
[0081]
在一种可能的实现方式中,分裂值的具体融合方法如下列公式(4):
[0082]vf
=(1-λ)*vo λ*vn;
ꢀꢀ
公式(4)
[0083]
其中,vf为融合后的融合分裂值,vo为该行驶属性在第二决策树模型中的第二目标分裂值,vn为该行驶属性在第一决策树模型中的第一目标分裂值,λ为分裂值融合系数,是一个预先确定的常量,决定了分裂值融合算法的更新速度。
[0084]
s502、根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序。
[0085]
可以理解的是,当同一种行驶属性在第一决策树模型和第二决策树模型中分别处于不同的决策位序时,车辆还可以对位序进行融合。
[0086]
具体的,车辆可以根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序。
[0087]
在一种可能的实现方式中,具体融合方法如下列公式(5):
[0088]
of=(1-β)*oo β*on;
ꢀꢀ
公式(5)
[0089]
其中,of为融合分裂值的位序,oo为该行驶属性在第二决策树模型中的位序,on为该行驶属性在第一决策树模型中的位序,β为位序融合系数,是一个预先确定的常量,决定了位序融合算法的更新速度。
[0090]
s503、根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型。
[0091]
具体的,车辆可以根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型。
[0092]
另外,由于在不同天气属性下所对应的第一决策树模型和第二决策树模型均不同,因此,不同天气属性下可以对应得到不同的融合变道模型,用于在不同天气状况下的自动驾驶场景中进行变道决策。
[0093]
进一步地,在确定融合变道模型之后,车辆可以继续获取车辆在手动驾驶场景中的变道数据,并在继续获取的变道数据的总数据量满足预设条件时,根据满足预设条件的变道数据确定新的第一决策树模型,且根据新的第一决策树模型和融合变道模型,确定新的融合变道模型。这样,车辆在自动驾驶时所使用的融合变道模型,会随着手动驾驶的过程而不断地进行优化更新,使得车辆自动驾驶时的变道决策风格愈发接近于手动驾驶的变道决策风格,从而持续提高车辆自动驾驶的“拟人化”程度,提升车辆自动驾驶过程中乘客的体验感。
[0094]
在一种可能的实现方式中,车辆可以在继续获取的变道数据的总数据的数据组量满足预设条件时,例如数据组量达到m组时,根据满足预设条件的变道数据确定新的第一决策树模型。
[0095]
在另一种可能的实现方式中,车辆可以在继续获取的变道数据的总数据量的大小高于预设数据量大小时,例如数据量的大小高于20kb时,根据满足预设条件的变道数据确定新的第一决策树模型。
[0096]
本实施例中,车辆根据第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值,根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序,并根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型,从而实现了第一决策树模型和第二决策树模型的融合,基于此得到的融合变道模型能够使得车辆在进行自主变道时的决策风格更加接近于车辆手动驾驶时的驾驶风格,从而提高了车辆自动驾驶的“拟人化”程度,提升了车辆自动驾驶过程中乘客的体验感。
[0097]
图6示出了一种可能的车辆变道模型的构建装置组成示意图,如图6所示,该车辆变道模型的构建装置可以包括获取模块61、第一确定模块62和第二确定模块63。
[0098]
获取模块61,用于获取车辆在手动驾驶场景中的m组变道数据,每组变道数据用于指示车辆每次变道时的数据,每组变道数据包括n种行驶属性的值,m和n为大于1的整数。
[0099]
第一确定模块62,用于根据获取模块61获取的每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定第一决策树模型。
[0100]
第二确定模块63,用于根据第一决策树模型和预存的第二决策树模型,确定融合
变道模型;融合变道模型用于车辆在自动驾驶场景中的变道决策。
[0101]
可选的,第二确定模块63,具体用于:根据第一确定模块62确定的第一决策树模型包括的每种行驶属性的第一目标分裂值,以及预存的第二决策树模型包括的每种行驶属性的第二目标分裂值,确定每种行驶属性的融合分裂值;根据第一决策树模型包括的每种行驶属性的第一目标分裂值的位序,以及第二决策树模型包括的每种行驶属性的第二目标分裂值的位序,确定每种行驶属性的融合分裂值的位序;根据每种行驶属性的融合分裂值,以及每种行驶属性的融合分裂值的位序,确定融合变道模型。
[0102]
可选的,第一确定模块62,具体用于:根据每组变道数据包括的每种行驶属性的值,以及每种行驶属性对应的预设范围,确定每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序;根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定第一决策树模型。
[0103]
可选的,第一确定模块62,具体用于:当每种行驶属性对应一个第一目标分裂值时,根据每种行驶属性的第一目标分裂值,以及每种行驶属性的第一目标分裂值的位序,确定第一决策树模型;当n种行驶属性中存在至少一种行驶属性对应多个分裂值时,根据每种行驶属性的至少一个分裂值,以及每种行驶属性的每个分裂值的位序,确定初始决策树模型,并对初始决策树模型进行剪枝处理,得到第一决策树模型,第一决策树模型包括的每种行驶属性的第一目标分裂值为相应的行驶属性的至少一个分裂值中的一个。
[0104]
可选的,第一确定模块62,具体用于:计算每种行驶属性包括的每个备选分裂值的基尼系数,根据每种行驶属性包括的每个备选分裂值的基尼系数的大小,确定每种行驶特征的至少一个分裂值,以及每种行驶属性的每个分裂值的位序。
[0105]
可选的,每组变道数据还包括天气属性的值,m组变道数据的天气属性的值相同;相应的,第二决策树模型为在与m组变道数据的天气属性的值的情况下得到的。
[0106]
可选的,获取模块61还用于,继续获取车辆在手动驾驶场景中的变道数据;第一确定模块62还用于,在继续获取的变道数据的总数据量满足预设条件时,根据满足预设条件的变道数据确定新的第一决策树模型;第二确定模块63还用于,根据新的第一决策树模型和融合变道模型,确定新的融合变道模型。
[0107]
当然,本发明实施例提供的车辆变道模型的构建装置包括但不限于上述模块。
[0108]
本发明实施例提供的车辆变道模型的构建装置,用于执行上述车辆变道模型的构建方法,因此可以达到与上述车辆变道模型的构建方法相同的效果。
[0109]
本发明另一实施例还提供一种变道决策方法,如图7所示,变道决策方法包括:
[0110]
s701、在自动驾驶场景中,获取车辆当前的目标变道数据,目标变道数据包括目标天气属性的值和n种目标行驶属性中每种目标行驶属性的值,n为大于1的整数。
[0111]
s702、确定与目标天气属性的值对应的目标融合变道模型,目标融合变道模型是根据第一决策树模型和预存的第二决策树模型得到的,第一决策树模型是根据车辆在手动驾驶场景中的m组变道数据得到的,m为大于1的整数。
[0112]
s703、根据每种目标行驶属性的值,采用目标融合变道模型确定车辆是否进行变道。
[0113]
本实施例中,车辆在自动驾驶场景中,获取车辆当前的目标天气属性的值和每种目标行驶属性的值,并确定与目标天气属性的值对应的目标融合变道模型,且根据每种目
标行驶属性的值,采用目标融合变道模型确定车辆是否进行变道。由于目标融合变道模型是基于特定天气属性下的第一决策树模型和第二决策树模型融合得到的,因此能够使得车辆采用目标融合变道模型进行变道决策时,更加贴近车辆手动驾驶时的变道风格,从而提高了车辆自动驾驶的“拟人化”程度,提升了车辆自动驾驶过程中乘客的体验感。
[0114]
图8示出了一种可能的变道决策装置的组成示意图,如图8所示,该变道决策装置包括获取模块81、第三确定模块82和决策模块83。
[0115]
获取模块81,用于在自动驾驶场景中,获取车辆当前的目标变道数据,目标变道数据包括目标天气属性的值和n种目标行驶属性中每种目标行驶属性的值,n为大于1的整数;
[0116]
第三确定模块82,用于确定与获取模块81获取的目标天气属性的值对应的目标融合变道模型,目标融合变道模型是根据第一决策树模型和预存的第二决策树模型得到的,第一决策树模型是根据车辆在手动驾驶场景中的m组变道数据得到的,m为大于1的整数;
[0117]
决策模块83,用于根据获取模块81获取的每种目标行驶属性的值,采用第三确定模块82确定的目标融合变道模型确定车辆是否进行变道。
[0118]
本发明另一实施例还提供一种车辆,该车辆包括:处理器和存储器;存储器用于存储计算机程序代码,计算机程序代码包括计算机指令;当处理器执行计算机指令时,车辆执行上述方法实施例所示的车辆变道模型的构建方法,或上述方法实施例所示的变道决策方法。
[0119]
本发明另一实施例还提供一种计算机可读存储介质,该计算机可读存储介质中存储有计算机指令,当计算机指令在计算机设备上运行时,使得计算机设备执行上述方法实施例所示的方法流程中计算机设备执行的各个步骤。
[0120]
本发明另一实施例还提供一种计算机程序产品,该计算机程序产品包括计算机指令,当计算机指令在计算机设备上运行时,使得计算机设备执行上述方法实施例所示的方法流程中计算机设备执行的各个步骤。
[0121]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何在本发明揭露的技术范围内的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。