1.本实用新型涉及一种带六维力传感的通用重载抓取机械手结构,属于结构设计领域。
背景技术:
2.近年来,随着对保障装备提出的快速高效、无人自主、通用性等要求,对新型保障装备的需求更加强烈。先前保障装备主要存在以下不足:一是自动化程度低,由于负载质量大、形状和吊点等特征各不相同,需要较多操作人员手工连接机械手与负载吊装接口;二是通用性差,针对不同形状、质量、质心位置的负载,往往需要不同的机械手,通过更换不同的吊装接口装置实现不同负载吊装。因此,解决对不同装备的快速、通用保障问题变得极其重要。
技术实现要素:
3.为解决上述技术问题,本实用新型提供了一种带六维力传感的通用重载抓取机械手结构,该带六维力传感的通用重载抓取机械手结构可实现对不同尺寸、不同质量、及不同姿态负载的抓取。
4.本实用新型通过以下技术方案得以实现。
5.本实用新型提供的一种带六维力传感的通用重载抓取机械手结构,包括电机;所述电机的输出轴连接有谐波减速器,谐波减速器通过电机安装座连接有机械手本体;所述谐波减速器上连接有减速器输出法兰,减速器输出法兰的下端轴上连接有传感器连接法兰,传感器连接法兰的上端与谐波减速器连接;所述传感器连接法兰通过套筒连接有六维力传感器,六维力传感器的一端连接有起重销组件;所述起重销组件通过卡套与机械手本体连接,机械手本体通过碟簧与套筒连接。
6.还包括防护罩,防护罩的末端采用阶梯状结构与机械手本体连接。
7.所述防护罩上装有视觉标签。
8.所述起重销组件包括固定端和与固定端连接的活动端,固定端的侧面通过卡套与机械手本体连接,顶部与六维力传感器连接。
9.所述活动端的端面为圆弧形状并设有导向角,在活动端的起吊接触面设有对称斜面。
10.所述电机安装座采用螺钉连接在谐波减速器与机械手本体之间。
11.所述传感器连接法兰采用滑槽结构。
12.所述卡套为两半拼接式结构,在卡套上设有斜面,卡套通过斜面与固定端连接。
13.本实用新型的有益效果在于:结构简单、承载能力大、接口可通用适配、可靠性高、适用范围广,可实现快速、安全、可靠的吊装抓取工作,提高了抓取对接速度、节省抓取时间。
附图说明
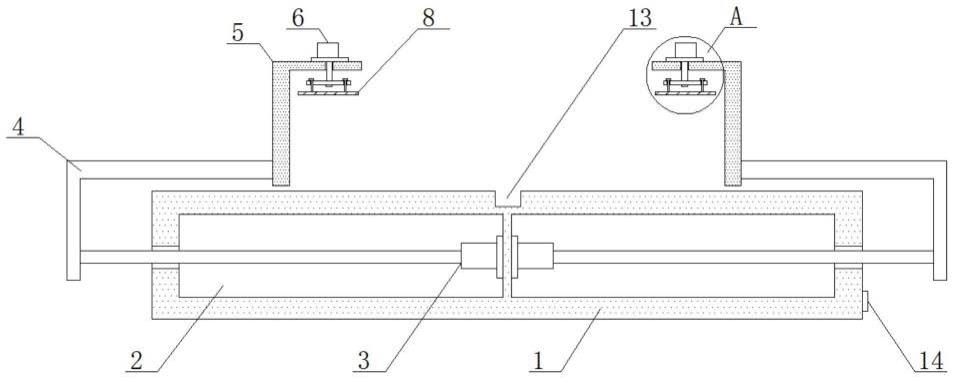
14.图1是本实用新型的结构示意图;
15.图2是图1中起重销组件的主视图;
16.图3是图2中固定端的结构图;
17.图4是图2中活动端的结构图;
18.图5是图1中碟簧的结构图;
19.图6是图1中卡套的结构图;
20.图7是图6的俯视图;
21.图8是图1中机械手本体的剖视图;
22.图中:1-防护罩,2-谐波减速器,3-减速器输出法兰,4-电机安装座,5-套筒,6-碟簧,7-卡套,8-起重销组件,9-机械手本体,10-六维力传感器,11-传感器连接法兰,12-电机。
具体实施方式
23.下面进一步描述本实用新型的技术方案,但要求保护的范围并不局限于所述。
24.如图1~8所示,一种带六维力传感的通用重载抓取机械手结构,包括电机12;所述电机12的输出轴连接有谐波减速器2,谐波减速器2通过电机安装座4连接有机械手本体9,电机安装座4用于支撑谐波减速器2;所述谐波减速器2上连接有减速器输出法兰3,减速器输出法兰3的下端轴上连接有传感器连接法兰11,传感器连接法兰11的上端与谐波减速器2连接,可实现电机12驱动力矩输出,谐波减速器2可驱动传感器连接法兰3转动,实现对谐波减速器2的定位;所述传感器连接法兰11通过套筒5连接有六维力传感器10,其传递运动,能压缩碟簧6,六维力传感器10的一端连接有起重销组件8,六维力传感器10可感知起重销组件8各方位受力情况;所述起重销组件8通过卡套7与机械手本体9连接,机械手本体9通过碟簧6与套筒5连接,碟簧6可以保护六维力传感器10不过载。
25.还包括防护罩1,防护罩1的末端采用阶梯状结构与机械手本体9连接。
26.所述防护罩1上装有视觉标签,既能保护内部零部件,起到防尘、防水的作用,又能通过视觉系统反馈机械手位置,为视觉系统提供测量位置参考。
27.所述起重销组件8包括固定端和与固定端连接的活动端,固定端的侧面通过卡套7与机械手本体9连接,顶部与六维力传感器10连接。
28.所述活动端的端面为圆弧形状并设有导向角,可防锁死、防脱,还增大了抓取时对机器人位置控制误差的包容度,在活动端的起吊接触面设有对称斜面,能够防止起吊过程脱销。
29.优选的,活动端可根据负载接口形式快速适配更换,可通用于各种负载的抓取。
30.所述电机安装座4采用螺钉连接在谐波减速器2与机械手本体9之间。
31.所述传感器连接法兰11采用滑槽结构,可实现轴向相当移动和动力传递。
32.所述卡套7为两半拼接式结构,在卡套7上设有斜面,卡套7通过斜面与固定端连接,保证起重销组件8具有一定的姿态适应能力和自动定位能力。
33.进一步的,卡套7采用斜面的形式对起重销组件8进行定位,并具有一定姿态适应能力、自动定心能力,使六维力传感器10在正常的受力和位移范围下工作,保护六维力传感
器10受力不会过大。
34.具体的,六维力传感器10可感知起重销组件8对准起吊孔过程的接触力情况,通过主动控制机器人位移和姿态可实现柔顺插销动作。
35.进一步的,六维力传感器10上方加装碟簧6,在插销过程中,通过结构限位,使起重销组件8具有较小位移,六维力传感器10在正常的受力和位移范围下工作。
36.可以理解的,六维力传感器10、套筒5以及内嵌的传感器连接法兰11连接在一起,通过谐波减速器2驱动。
37.可以理解的,电机12转动,依次带动谐波转速器2、减速器输出法兰3、传感连接法兰11、套筒5、六维力传感器10、起重销组件8转动,实现负载的旋锁和起吊、插销、抓取。
38.本实用新型装在机械臂末端,通过六维力传感器感知起重销组件对准情况,可实现负载的自适应主动柔顺插销、起吊动作;起重销组件的模块化设计接口可实现任意吊装接口的适配,解决了大质量负载在吊装过程中自动对接难、接口适配难的问题;采用人工智能、机器视觉技术实现自动抓取,节省了人力成本,排除抓取过程对操作人员的安全隐患;提高了吊具的通用化水平,可在不需要更换吊具的情况下吊装多种尺寸的负载。
39.实施例
40.如上所述,起重销组件8采用蘑菇头形状,在吊装时可准确起吊负载;起重销组件8通过拼接式的卡套7固定在机械手本体9内,机械手本体9与起重销组件8留有间隙,允许一定量的横向晃动;起重销组件8上端与六维力传感器10连接,传感器连接法兰11内嵌在套筒5内,传感器连接法兰11、套筒5以及六维力传感器10采用螺钉连接在一起,套筒5中间套有碟簧6;传感器连接法兰11采用滑槽结构与减速器输出法兰3连接;减速器输出法兰3与谐波减速器2采用螺钉连接;电机安装座4安装在机械手本体9上端,支撑谐波减速器2;防护罩1采用阶梯结构与机械手本体9连接,采用螺钉固定,防护罩1上装有视觉标签,机器人视觉系统通过标签获取机械手位置;工作时,电机驱动谐波减速器2、传感器连接法兰11、套筒5、六维力传感器10以及起重销组件8同时转动,六维力传感器10可反馈起重销组件8受到的接触力和力矩,机器人控制系统可根据接触力和力矩控制机器人调节插销姿态,实现柔顺插销、抓取。
41.本实用新型的具体工作过程如下:
42.第一步:吊装机器人系统通过测量机械手防护罩1上的视觉标签,获取机械手起重销组件8和负载起吊孔位置,根据位置偏差,驱动机械手自动运动到起吊孔上方;
43.第二步:控制机械手向下插销,通过六维力传感器感知插销过程起重销组件8与起吊孔之间的接触力,采用力-位柔顺控制算法进行起重销组件(8)的姿态调节,实现快速柔顺插销动作;
44.第三步:插销完成后,电机12驱动起重销组件8旋转90
°
,并向上提拉机械手张紧,实现起吊锁定,起重销组件8的对称斜面结构可防止起重销从起吊孔中脱出,实现安全起吊作业。
45.综上所述,与现有技术相比,本实用新型达到了如下技术效果。
46.1.机械手设计了起重销旋转驱动机构,采用电机、谐波减速器作为动力,其中电机内置角位移编码器,实现了起重销的插销和旋锁角度的精确控制;
47.2.机械手内置六维力传感器,可实现机械手插销过程的精确力和力矩感知,便于
机器人进行插销过程主动柔顺控制;
48.3.针对六维力传感器量程较小,不便于起吊重型负载的问题,设计了传感器保护机构,通过碟簧和限位结构实现了重载吊装过程的传感器过载保护;
49.4.机械手起重销组件由固定端和活动端组成,活动端可根据负载起吊接口形式快速更换,可实现对不同尺寸、不同接口负载的自适应抓取;
50.5.起重销组件采用圆弧形状和对称斜面,增大了对接负载起吊孔时对机器人位置控制误差的包容度,能够防锁死、防脱,可以实现与负载吊装接口的精准快速对接,提高了机械手的操作性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。