1.本实用新型涉及机械领域,尤其涉及高聚物发泡板等高聚物发泡板抓取领域,具体是指一种实现高聚物发泡板抓取及放置的机械手装置。
背景技术:
2.随着新材料和复合材料的兴起和利用,高聚物发泡板等高聚物发泡板的生产和使用量大大增加,传统半自动化的作业模式已无法满足市场对于产品产量的要求,全自动的加工运输必成为未来的发展方向。传统半自动设备高聚物发泡板的放置多为人工作业,主要缺点有以下几点:(1)人工劳动强度大,劳动环境差;(2)工作效率无法满足现场生产的需求;(3) 易造成高聚物发泡板破损。
技术实现要素:
3.本实用新型的目的是克服了上述现有技术的缺点,提供了一种满足同一性好、缓冲性好、适用范围较为广泛的实现高聚物发泡板抓取及放置的机械手装置。
4.为了实现上述目的,本实用新型的实现高聚物发泡板抓取及放置的机械手装置如下:
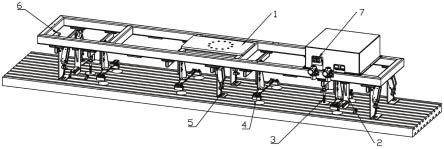
5.该实现高聚物发泡板抓取及放置的机械手装置,其主要特点是,所述的装置包括机械手主梁、夹持整理组件、检测模具车组件、气缸提升组件、气缸插取固定组件、探测组件以及电气组件,所述的夹持整理组件设于机械手主梁的一侧,所述的检测模具车组件置于机械手主梁下方,所述的气缸提升组件设于机械手主梁下方,所述的气缸提升组件吸附高聚物发泡板,所述的气缸插取固定组件设于机械手主梁下方,所述的气缸插取固定组件插取高聚物发泡板,所述的探测组件固定于前后两组气缸提升组件上,所述的探测组件探测高聚物发泡板位置;所述的电气组件置于机械手主梁上方,所述的电气组件控制气路并固定电子器件。
6.较佳地,所述的夹持整理组件包括气缸安装板、摆杆、无油衬套、弹簧、等高螺栓和旋转夹紧气缸,所述的气缸安装板的底座安装在机械手主梁上,所述的气缸安装板的另一端与旋转夹紧气缸连接,所述的摆杆安装在旋转夹紧气缸的末端转轴上,所述的等高螺栓安装在摆杆上的螺纹孔中,所述的无油衬套和弹簧安装在摆杆和等高螺栓之间。
7.较佳地,所述的检测模具车组件包括转接板、传感器安装支架、保护罩和传感器,所述的转接板安装在机械手主梁上,所述的传感器固定在传感器安装支架上,所述的传感器安装支架和保护罩固定在转接板上,所述的传感器和传感器安装支架在保护罩内部。
8.较佳地,所述的气缸提升组件包括吸盘抓取副梁、吸盘气缸安装座、连接角件、吸盘连接板、吸盘连接块和吸盘,所述的吸盘抓取副梁固定在机械手主梁上,所述的吸盘气缸安装座固定在吸盘抓取副梁上,所述的连接角件固定在吸盘气缸安装座上,所述的吸盘连接板与连接角件相连接,所述吸盘连接板的两端分别安装有吸盘连接块,所述的两端安装的吸盘连接块分别与吸盘固定。
9.较佳地,所述的气缸插取固定组件包括插取副梁、插刀安装板、插刀连接块、插刀固定块、气缸和白钢条,所述的插取副梁固定在机械手主梁上,所述的插刀安装板对称安装在插取副梁上,所述的气缸分别对应镜像安装在插刀安装板上,所述的插刀连接块分别对称安装在气缸的伸缩杆上,所述的插刀固定块分别对称固定在相应的插刀连接块上,所述的白钢条分别对称固定在相应插刀固定块上。
10.较佳地,所述的探测组件包括安装支架、探杆安装板、探杆、挡块、探片、接近开关、探测弹簧和无油衬套,所述的安装支架固定在气缸提升组件中吸盘气缸安装座的背面,所述的探杆安装板固定在安装支架上,所述的接近开关安装在探杆安装板的槽口中,所述的无油衬套固定在安装支架上,所述的挡块固定在无油衬套上,所述的探杆通过轴孔配合安装在无油衬套中,并与挡块同心轴,所述的探片固定在探杆末端,所述的探测弹簧固定在探片和无油衬套之间,并安装在探杆外侧。
11.采用了本实用新型的实现高聚物发泡板抓取及放置的机械手装置,可实现全自动整理对齐高聚物发泡板、抓取高聚物发泡板、定点放置等工艺处理。本实用新型比较于传统人工操作方式,整个工艺过程节拍快速稳定,产品同一性好。本实用新型装置采用真空压力吸盘进行高聚物发泡板高聚物发泡板进行抓取作业,相比传统的抓取方式更加稳定,且对高聚物发泡板的损伤较小。本发生采用了真空吸盘抓取与插刀抓取方式相结合,保证了高聚物发泡板抓取过程中的稳定性。
附图说明
12.图1为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的结构示意图。
13.图2为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的夹持整理组件轴侧示意图。
14.图3为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的检测模具车组件轴侧示意图。
15.图4为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的气缸提升组件轴侧示意图。
16.图5为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的气缸插取固定组件轴侧示意图。
17.图6为本实用新型的实现高聚物发泡板抓取及放置的机械手装置的探测组件轴侧示意图。
18.附图标记:
[0019]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
机械手主梁
[0020]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
夹持整理组件
[0021]
201
ꢀꢀꢀꢀꢀꢀꢀ
气缸安装板
[0022]
202
ꢀꢀꢀꢀꢀꢀꢀ
摆杆
[0023]
203
ꢀꢀꢀꢀꢀꢀꢀ
无油衬套
[0024]
204
ꢀꢀꢀꢀꢀꢀꢀ
弹簧
[0025]
205
ꢀꢀꢀꢀꢀꢀꢀ
等高螺栓
[0026]
206
ꢀꢀꢀꢀꢀꢀꢀ
旋转夹紧气缸
[0027]3ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
检测模具车组件
[0028]
301
ꢀꢀꢀꢀꢀꢀꢀ
转接板
[0029]
302
ꢀꢀꢀꢀꢀꢀꢀ
传感器安装支架
[0030]
303
ꢀꢀꢀꢀꢀꢀꢀ
保护罩
[0031]
304
ꢀꢀꢀꢀꢀꢀꢀ
传感器
[0032]4ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
气缸提升组件
[0033]
401
ꢀꢀꢀꢀꢀꢀꢀ
吸盘抓取副梁
[0034]
402
ꢀꢀꢀꢀꢀꢀꢀ
吸盘气缸安装座
[0035]
403
ꢀꢀꢀꢀꢀꢀꢀ
连接角件
[0036]
404
ꢀꢀꢀꢀꢀꢀꢀ
吸盘连接板
[0037]
405
ꢀꢀꢀꢀꢀꢀꢀ
吸盘连接块
[0038]
406
ꢀꢀꢀꢀꢀꢀꢀ
吸盘
[0039]5ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
气缸插取固定组件
[0040]
501
ꢀꢀꢀꢀꢀꢀꢀ
插取副梁
[0041]
502
ꢀꢀꢀꢀꢀꢀꢀ
插刀安装板
[0042]
503
ꢀꢀꢀꢀꢀꢀꢀ
插刀连接块
[0043]
504
ꢀꢀꢀꢀꢀꢀꢀ
插刀固定块
[0044]
505
ꢀꢀꢀꢀꢀꢀꢀ
气缸
[0045]
506
ꢀꢀꢀꢀꢀꢀꢀ
白钢条
[0046]6ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
探测组件
[0047]
601
ꢀꢀꢀꢀꢀꢀꢀ
安装支架
[0048]
602
ꢀꢀꢀꢀꢀꢀꢀ
探杆安装板
[0049]
603
ꢀꢀꢀꢀꢀꢀꢀ
探杆
[0050]
604
ꢀꢀꢀꢀꢀꢀꢀ
挡块
[0051]
605
ꢀꢀꢀꢀꢀꢀꢀ
探片
[0052]
606
ꢀꢀꢀꢀꢀꢀꢀ
接近开关
[0053]
607
ꢀꢀꢀꢀꢀꢀꢀ
探测弹簧
[0054]
608
ꢀꢀꢀꢀꢀꢀꢀ
无油衬套
[0055]7ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电气组件
具体实施方式
[0056]
为了能够更清楚地描述本实用新型的技术内容,下面结合具体实施例来进行进一步的描述。
[0057]
本实用新型的该实现高聚物发泡板抓取及放置的机械手装置,其中包括机械手主梁1、夹持整理组件2、检测模具车组件3、气缸提升组件4、气缸插取固定组件5、探测组件6以及电气组件7,所述的夹持整理组件2设于机械手主梁1的一侧,所述的检测模具车组件3 置于机械手主梁1下方,所述的气缸提升组件4设于机械手主梁1下方,所述的气缸提升组件4吸附高聚物发泡板,所述的气缸插取固定组件5设于机械手主梁1下方,所述的气缸插取固定组件5插取高聚物发泡板,所述的探测组件6固定于前后两组气缸提升组件4上,所述的探
测组件6探测高聚物发泡板位置;所述的电气组件7置于机械手主梁1上方,所述的电气组件7控制气路并固定电子器件。
[0058]
作为本实用新型的优选实施方式,所述的夹持整理组件2包括气缸安装板201、摆杆202、无油衬套203、弹簧204、等高螺栓205和旋转夹紧气缸206,所述的气缸安装板201的底座安装在机械手主梁1上,所述的气缸安装板201的另一端与旋转夹紧气缸206连接,所述的摆杆202安装在旋转夹紧气缸206的末端转轴上,所述的等高螺栓205安装在摆杆202上的螺纹孔中,所述的无油衬套203和弹簧204安装在摆杆202和等高螺栓205之间。
[0059]
作为本实用新型的优选实施方式,所述的检测模具车组件3包括转接板301、传感器安装支架302、保护罩303和传感器304,所述的转接板301安装在机械手主梁1上,所述的传感器304固定在传感器安装支架302上,所述的传感器安装支架302和保护罩303固定在转接板301上,所述的传感器304和传感器安装支架302在保护罩303内部。
[0060]
作为本实用新型的优选实施方式,所述的气缸提升组件4包括吸盘抓取副梁401、吸盘气缸安装座402、连接角件403、吸盘连接板404、吸盘连接块405和吸盘406,所述的吸盘抓取副梁401固定在机械手主梁1上,所述的吸盘气缸安装座402固定在吸盘抓取副梁401 上,所述的连接角件403固定在吸盘气缸安装座402上,所述的吸盘连接板404与连接角件 403相连接,所述吸盘连接板404的两端分别安装有吸盘连接块405,所述的两端安装的吸盘连接块405分别与吸盘406固定。
[0061]
作为本实用新型的优选实施方式,所述的气缸插取固定组件5包括插取副梁501、插刀安装板502、插刀连接块503、插刀固定块504、气缸505和白钢条506,所述的插取副梁501 固定在机械手主梁1上,所述的插刀安装板502对称安装在插取副梁501上,所述的气缸505 分别对应镜像安装在插刀安装板502上,所述的插刀连接块503分别对称安装在气缸505的伸缩杆上,所述的插刀固定块504分别对称固定在相应的插刀连接块503上,所述的白钢条 506分别对称固定在相应插刀固定块504上。
[0062]
作为本实用新型的优选实施方式,所述的探测组件6包括安装支架601、探杆安装板602、探杆603、挡块604、探片605、接近开关606、探测弹簧607和无油衬套608,所述的安装支架601固定在气缸提升组件4中吸盘气缸安装座402的背面,所述的探杆安装板602固定在安装支架601上,所述的接近开关606安装在探杆安装板602的槽口中,所述的无油衬套 608固定在安装支架601上,所述的挡块604固定在无油衬套608上,所述的探杆603通过轴孔配合安装在无油衬套608中,并与挡块604同心轴,所述的探片605固定在探杆603末端,所述的探测弹簧607固定在探片605和无油衬套608之间,并安装在探杆603外侧。
[0063]
本实用新型的具体实施方式中,提供了一种可全自动整理对齐高聚物发泡板、抓取高聚物发泡板、定点放置等工艺处理。如图1所示,装置包括:
[0064]
夹持整理组件2,用于对齐整理高聚物发泡板,将高聚物发泡板夹紧。
[0065]
检测模具车组件3,用于模具车不在固定位置的情况,定位模具车的位置。
[0066]
气缸提升组件4,用于抓取高聚物发泡板。
[0067]
气缸插取固定组件5,辅助抓取高聚物发泡板,起到抓取和固定的作用。
[0068]
探测组件6,用于抓取前探测高聚物发泡板的位置,为抓取做准备。
[0069]
气缸插取固定组件5设于机械手主梁1下方包含3组,用于插取高聚物发泡板,起到固定和提升高聚物发泡板的辅助作用;前后两组白钢刀的位置在竖直方向是“八”字型,向
外插取高聚物发泡板称为外插刀,中间一组白钢刀的位置在竖直方向是倒“八”字型,向内插取高聚物发泡板称为内插刀用于插取高聚物发泡板,起到固定和提升高聚物发泡板的辅助作用,外插刀与内插刀相结合的方式使用,进一步提高了辅助抓取的稳定性。
[0070]
该利用于高聚物发泡板等高聚物发泡板抓取以及放置的机械手装置及方法,其主要特点是,所述的方法包括以下步骤:
[0071]
(1)将装置调整至初始位置,初始位置探测组件6的探片605在竖直方向比吸盘406 要低;装置随机器人运动至高聚物发泡板的上方的设定位置,旋转夹紧气缸206、气缸505 均处于缩回状态,探测弹簧607处于原始放松状态;
[0072]
(2)通过夹持整理组件2对高聚物发泡板进行靠边对齐整理:旋转夹紧气缸206转轴旋转运动,旋转90
°
后将高聚物发泡板夹紧,并起到将高聚物发泡板边缘对齐并整理的作用;
[0073]
(3)通过探测组件6检测到高聚物发泡板的位置,进行抓取准备;探片605接触到高聚物发泡板后,探测弹簧607处于压缩状态,使得探杆603向上运动,同时顶住挡块604 向上运动一定距离;因此被接近开关606捕捉到信号,表明已经检测到高聚物发泡板位置,可以开始抓取;
[0074]
(4)通过气缸提升组件4抓取高聚物发泡板;
[0075]
(5)通过气缸插取固定组件5将插刀插入高聚物发泡板中;在气缸提升组件4抓取高聚物发泡板后,气缸505开始运动,气缸505伸长带动白钢条506钢刀向下呈固定角度运动,并插入高聚物发泡板中,起到抓取和固定的作用;
[0076]
(6)机械手抓取高聚物发泡板进行旋转,放置准备;
[0077]
(7)若模具车始终停在固定位置,则直接放置高聚物发泡板;若模具车没有停在固定位置,则通过检测模具车组件3定位模具车的位置,再进行放置;
[0078]
(8)装置恢复至初始位置,继续步骤(1)处理下个产品。
[0079]
本实用新型的具体实施方式中,基于上述装置实现高聚物发泡板等高聚物发泡板抓取以及放置的机械手方法,包括以下步骤:
[0080]
(1)初始位置。装置随机器人运动至高聚物发泡板的上方的设定位置,旋转夹紧气缸206、气缸505均处于缩回状态,探测弹簧607处于原始放松状态;
[0081]
(2)夹持整理。夹持整理组件2对高聚物发泡板进行靠边对齐整理:旋转夹紧气缸206 转轴旋转运动,旋转90
°
后将高聚物发泡板夹紧。
[0082]
(3)抓取准备。探测组件6检测到高聚物发泡板的位置,进行抓取准备;探片605接触到高聚物发泡板后,探测弹簧607处于压缩状态,使得探杆603向上运动,同时顶住挡块604向上运动一定距离;因次被接近开关606捕捉到信号,表明已经检测到高聚物发泡板位置,可以开始抓取。
[0083]
(4)抓取作业。气缸提升组件4抓取高聚物发泡板;在气缸提升组件4抓取高聚物发泡板后,气缸505开始运动,气缸505伸长带动白钢条506钢刀向下呈固定角度运动,并插入高聚物发泡板中,起到抓取和固定的作用;
[0084]
(5)放置作业。若模具车始终停在固定位置,则直接放置高聚物发泡板;若模具车没有停在固定位置,则通过检测模具车组件3定位模具车的位置,再进行放置。
[0085]
(6)复位、重复循环。所有机构恢复至初始位置,随后对下一个产品进行同样的操
作,如此循环作业。
[0086]
采用了本实用新型的实现高聚物发泡板抓取及放置的机械手装置,可实现全自动整理对齐高聚物发泡板、抓取高聚物发泡板、定点放置等工艺处理。本实用新型比较于传统人工操作方式,整个工艺过程节拍快速稳定,产品同一性好。本实用新型装置采用真空压力吸盘进行高聚物发泡板高聚物发泡板进行抓取作业,相比传统的抓取方式更加稳定,且对高聚物发泡板的损伤较小。本发生采用了真空吸盘抓取与插刀抓取方式相结合,保证了高聚物发泡板抓取过程中的稳定性。
[0087]
在此说明书中,本实用新型已参照其特定的实施例作了描述。但是,很显然仍可以作出各种修改和变换而不背离本实用新型的精神和范围。因此,说明书和附图应被认为是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。