1.本实用新型涉及机器人工作站领域,尤其涉及一种用于机器人高精度夹持机构。
背景技术:
2.随着经济和科技的发展,在工业生产中自动化设备的运用越来越广泛,通过自动化设备来取代人工效率低下、成本高的问题。特别是对重物的抓取移位时,自动化设备能在很大程度上解决人工效率低下问题。现有技术中,自动化夹持机构有很多,针对不同类别的产品设计了不同结构的夹持机构。为提高夹持机构的灵活度,夹持机构通常设置在机械手臂上,在机械手臂调动下进行三维空间上的移动。但现有的夹持机构都是针对产品特殊设计,通用性低。且体积和重量较大,会影响机械手臂的精度。如何减小夹持机构的体积,以减小机械手臂的负担,同时又能保证夹持机构的通用性,成为有待解决的问题。
技术实现要素:
3.为克服上述缺点,本实用新型的目的在于提供一种用于机器人高精度夹持机构,结构紧凑,作为机械手臂的第五轴,大大提高了夹持精度,且通用性高。
4.为了达到以上目的,本实用新型采用的技术方案是:一种用于机器人高精度夹持机构,固定在机器手臂的末端法兰上,包括升降装置,所述升降装置固定在末端法兰上;夹取装置,所述夹取装置固定在升降装置上,并在所述升降装置作用下靠近或远离末端法兰,所述夹取装置包括横板和两个夹持板,一个所述夹持板与横板固定连接,另一个所述夹持板在丝杆驱动装置作用下来回移动,两个所述夹持板的相对面上均可拆卸连接有夹持块,所述夹持块能固定在沿夹持板长度方向的不同高度位置,两个所述夹持块之间形成夹持腔。
5.本实用新型的有益效果在于:机械手臂带动夹持机构到达夹持位置后,升降装置可精准调整夹持夹取装置和工件的距离,弥补机械手臂精度缺陷。同时形成夹持腔的夹持块与夹持板可拆卸连接,可根据工件尺寸和性质,灵活变更位置和材质,适应性强。夹持机构作为机器手臂的第七轴,精度高,联动性强,不易损伤工件。
6.进一步来说,述夹持板沿其长度方向设置有两排间隔设置的螺孔组,每个螺孔组均包括若干螺纹孔,所述夹持块上穿设有与螺纹孔螺纹连接的螺栓。可通过螺栓快速定位夹持块,且螺纹孔成排设置,可根据工件尺寸,灵活选择固定夹持块的位置。
7.进一步来说,所述夹持板上还开设有位于两排螺孔组之间的减重孔。减轻夹持板重量,提高夹持板的移动精度。
8.进一步来说,所述升降装置包括气缸,所述气缸通过固定架固定在末端法兰上,所述气缸的输出轴固定有能在其推动下往复移动的升降板,所述升降板和横板远离夹持板的一侧固定连接。气动做直线运动时,推动横板移动。
9.进一步来说,所述升降板上固定有导板,所述气缸能沿导板往复滑动,气缸伸缩时,推动升降板移动,同时导板沿气缸的外壳滑动,提高了升降板移动的稳定性。
10.进一步来说,所述丝杆驱动装置包括丝杆、螺母座和电机,所述丝杆转动连接在横板设置有夹持板的一侧,所述电机设置在横板远离夹持板的一侧,且所述电机通过传动组件驱动丝杆转动,所述螺母座与丝杆螺纹连接且与一个夹持板固定连接。电机和丝杆分别位于横板的两侧,结构更加紧凑,电机驱动丝杆转动时,螺母座沿丝杆移动,进而带动一个夹持板移动。
11.进一步来说,所述传动组件包括固定在电机输出轴的主动轮,所述丝杆的端部固定有从动轮,所述主动轮和从动轮外环绕有传动皮带。
12.进一步来说,所述丝杆两侧还对称设置有与丝杆平行设置的导轨,与所述螺母座固定连接的夹爪上固定有与导轨匹配的滑块。导轨的设置,提高了夹持板移动的稳定性。
13.进一步来说,所述横板的上固定有距离传感器,与所述丝杆驱动装置连接的夹持板上设置有与其同步移动的检测板,所述距离传感器用于检测检测板的移动距离。
附图说明
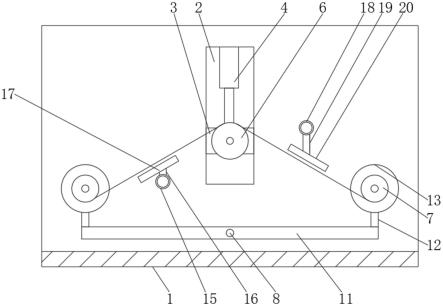
14.图1为本实用新型实施例的侧视图;
15.图2为本实用新型实施例立体结构示意图;
16.图3为本实用新型实施例中夹取装置的结构示意图;
17.图4为本实用新型实施例中升降装置的结构示意图。
18.图中:
19.100、机器手臂;200、升降装置;300、夹取装置;
20.1、横板;2、夹持板;21、螺纹孔;22、减重孔;31、丝杆;32、螺母座;33、电机;341、主动轮;342、从动轮;343、传动皮带;35、导轨;4、夹持块;51、距离传感器;52、检测板;6、滑块;
21.5、气缸;6、固定架;7、升降板;8、导板。
具体实施方式
22.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
23.实施例
24.参见附图1所示,本实用新型的一种用于机器人高精度夹持机构,固定在机器手臂100的末端法兰上,夹持机构能在机械手臂带动下在三维空间内移动,到达工件夹持位置。
25.夹持机构包括升降装置200和与升降装置200连接的夹持装置,升降装置200固定在末端法兰上,并能推动夹持装置靠近或远离末端法兰,也就是微调夹持装置和工件间的距离。夹取装置300用于抓取工件。
26.参照附图2和4所示,升降装置200包括气缸5,气缸5通过固定架6固定在末端法兰上。气缸5的输出轴固定有能在其推动下往复移动的升降板7,升降板7和夹持装置固定连接。气动做直线运动时,推动夹持装置移动。升降板7上固定有导板8,导板8位于气缸5的一侧,气缸5能沿导板8往复滑动。气缸5伸缩时,推动升降板7移动,同时导板8沿气缸5的外壳滑动,提高了升降板7移动的稳定性。
27.参照附图2和3所示,夹取装置300包括横板1和两个夹持板2,夹持板2和横板1垂
直。一个夹持板2与横板1固定连接,另一个夹持板2在丝杆31驱动装置作用下来回移动,两个夹持板2的相对面上均可拆卸连接有夹持块4。夹持块4能固定在夹持板2长度方向的不同高度位置,两个夹持块4之间形成夹持腔。夹持块4可根据工件的尺寸灵活固定位置,夹持块4与工件的中心位置抵靠,可根据工件的尺寸调节夹持块4的高度。夹持块4的形状不做限定,可为方形、半圆形等,根据工件的形状灵活选用,与工件匹配即可。
28.夹持板2沿其长度方向设置有两排间隔设置的螺孔组,每个螺孔组均包括若干螺纹孔21,螺纹孔21均匀分布,夹持块4上穿设有与螺纹孔21螺纹连接的螺栓。螺栓锁紧在螺纹孔21内,将夹持块4固定在夹持板2上,完成对夹持块4的定位。可通过螺栓快速定位夹持块4,且螺纹孔21成排设置,可根据工件尺寸,灵活选择固定夹持块4的位置。夹持板2上还开设有位于两排螺孔组之间的减重孔22。减轻夹持板2重量,提高夹持板2的移动精度。
29.丝杆31驱动装置包括丝杆31、螺母座32和电机33,丝杆31转动连接在横板1设置有夹持板2的一侧,电机33设置在横板1远离夹持板2的一侧。且电机33通过传动组件驱动丝杆31转动,螺母座32与丝杆31螺纹连接且与一个夹持板2固定连接。横板1上设置有供丝杆31转动的轴承座。电机33和丝杆31分别位于横板1的两侧,结构更加紧凑,电机33驱动丝杆31转动时,螺母座32沿丝杆31移动,进而带动一个夹持板2移动。传动组件包括固定在电机33输出轴的主动轮341,丝杆31的端部固定有从动轮342,主动轮341和从动轮342外环绕有传动皮带343。
30.丝杆31两侧还对称设置有与丝杆31平行设置的导轨35,与螺母座32固定连接的夹爪上固定有与导轨35匹配的滑块6。导轨35的设置,提高了夹持板2移动的稳定性。
31.横板1的上固定有距离传感器51,与丝杆31驱动装置连接的夹持板2上设置有与其同步移动的检测板52,距离传感器51用于检测检测板52的移动距离。距离传感器51为两个红外传感器,分别位于检测板52两侧,一个为发射件,一个为接收件。检测板52在两个距离传感器51间移动时,可检测检测板52的位置,即一个夹持板2的位置。
32.机械手臂带动夹持机构到达夹持位置后,升降装置200可精准调整夹持夹取装置300和工件的距离,弥补机械手臂精度缺陷。同时形成夹持腔的夹持块4与夹持板2可拆卸连接,可根据工件尺寸和性质,灵活变更位置和材质,适应性强。夹持机构作为机器手臂100的第七轴,精度高,联动性强,不易损伤工件。
33.以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。