1.本发明用于车辆的电子外后视镜全息成像显示,更具体涉及一种电子外后视镜全息成像系统及汽车。
背景技术:
2.传统的外后视镜,存在如下缺陷:在雨天行车时雨水落在镜面上、夜间行车时后车的远光灯限制的驾驶员的视野;由于外后视镜是具有一定质量的悬臂结构,其向车外伸出,体积太大,容易导致刮碰损坏,设计不合理还会产生抖动问题;此外,外后视镜的镜壳镜片较大,会增加风阻并产生风噪。
技术实现要素:
3.本发明提供了一种电子外后视镜全息成像系统及汽车,通过利用3d全息投影原理在传统后视镜位置显示捕捉到的包含驾驶员需求视野对应的图像,营造出类似传统后视镜的显示视觉效果,相较传统后视镜,由于3d全息led显示屏的体积比传统外后视镜的体积更小,所产生的风阻和油耗也会更小。
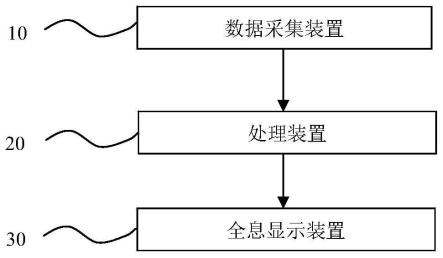
4.本发明的技术方案为:本发明提供了一种电子外后视镜全息成像系统,包括:数据采集装置,其捕捉包含车辆侧后方的驾驶员视野盲区的图像;处理装置,其先对数据采集模块采集的图像进行光照处理,再基于驾驶员需求视野对进行光照处理后的图像剪裁;还基于车辆实时车速和车辆行进方向的正面风速,计算3d全息led风扇的转速;全息显示装置,包括用于替代车辆原外后视镜的3d全息led风扇,3d全息led风扇按照处理装置计算出的转速进行运转,并按照处理装置提供的环境亮度信息对led的显示亮度进行调节,再将经过图像处理模块处理后的图像数据进行成像显示。
5.优选地,处理装置先对数据采集装置采集的图像分区域进行强光抑制处理和/或背光补偿处理。
6.优选地,处理装置基于获取到的驾驶员眼球位置和车辆姿态信息,确定驾驶员需求视野,再基于确定的驾驶员需求视野对进行光照处理后的图像剪裁。
7.优选地,处理装置基于车辆实时车速和车辆行进方向的正面风速,通过公式:fw=(a*cd*v)/16计算3d全息led风扇受到的风阻f
w,
其中,cd为风阻系数,a为3d全息led风扇沿车辆行进方向的垂直投影面积;v为相对空气流体速度的平方,相对空气流体速度等于车速
±
3d全息led风扇在车辆行进方向上的正面风速,逆风为 ,顺风为-;再根据计算出的风阻fw和3d全息led风扇的转速的预定对应关系,查表确定需求的3d全息led风扇的转速。
8.优选地,处理装置先对数据采集模块采集的图像进行光照处理之前,先对数据采
集模块采集的图像进行图像畸变处理和图像清晰度处理。
9.本发明还提供了一种汽车,包括上述的电子外后视镜全息成像系统。
10.本发明的有益效果为:摄像头的采集范围更广,处理装置基于驾驶员需求视野将驾驶员所需求的这部分图像剪裁出,再利用替代原外后视镜的3d全息led风扇将其进行全息成像,由于3d全息led风扇成像的画面只包含驾驶员需求的这部分画面,因此,可以将3d全息led风扇的体积设置的比原有的外后视镜的体积更小,以此来减少风阻以及因风阻大导致的风噪;此外,3d全息led风扇的转速是基于其实时受到的风阻进行调整,能够保障所成像的画面的实时性;3d全息led风扇的成像显示亮度是根据环境亮度进行调整,可以基于实际场景适应性的调整。本方案基于3d全息成像技术,在用户习惯的视线区域成像,该装置科技感强,体验新颖,且符合技术由机械向场效应发展的规律。
附图说明
11.图1为本发明实施例系统示意图;图2为本发明实施例中的处理装置的工作流程图。
具体实施方式
12.参照图1,本实施例体用了一种具有低风阻的电子外后视镜全息成像系统,该系统包括:数据采集装置10,数据采集装置用于采集包含驾驶员视野盲区的汽车左、右后侧方的视野区域的图像信息。
13.数据采集装置10具体可以利用摄像头/超声波雷达/毫米波雷达/激光雷达采集信息数据,传递给后续的处理装置,数据采集装置传输给处理装置的数据类型可以是数字信号或者模拟信号,如lvds格式信号,该信号为定频采集,具有高保真,抗干扰能力强等特点。
14.处理装置20,处理装置接收数据采集装置传输的数据,联动本车数据和环境信息,生成3d全息led风扇的转速信息和需求的图像信息,再传递给3d全息led风扇实现成像显示。
15.处理装置20由车内电源分配12v供电,并与车辆采用can/lin/以太网等方式进行通信和交互。
16.其中,本车数据包含车辆的行驶速度以及3d全息led风扇在车辆行进方向上的风速信息(该类信息由车内驾驶环境检测系统给出)计算3d全息led风扇受到的风阻fw,其中fw=(a*cd*v)/16,cd为风阻系数(风阻系数通过风洞实验和下滑实验所确定的一个数学参数,风阻系数几乎为常量), a为3d全息led风扇沿车辆行进方向的垂直投影面积(该面积相对传统后视镜的垂直投影面积减小70~80%,)v为相对空气流体速度的平方;相对空气流体速度等于车辆的车速
±
3d全息led风扇在车辆行进方向上的正面风速,逆风为“ ”,顺风为
“‑”
,本计算忽略s30风扇转速的对v2的正向影响。
17.然后根据计算出的风阻与转速的预先标定关系,标定得到对应需求的转速。
18.另外,处理装置20需要先对数据采集模块采集的图像进行图像畸变处理和图像清晰度处理,再对数据采集模块采集的图像进行光照处理。
19.其中,进行图像畸变处理的过程包括对采集到的图像进行矫正,适应人眼正常观察;图像清晰度处理的过程包含对模糊部位进行多次成像对比合成清晰图像。图像畸变处理和图像清晰度处理都可以采用现有手段实现。
20.处理装置20对数据采集装置采集的图像分区域进行强光抑制处理和/或背光补偿处理。具体来说,对应图像上的强光部位采用过滤处理,对图片上的弱光部位增强信号数据;强光抑制和背光补偿的原理为现有技术。
21.在光照处理后,根据驾驶员眼球位置信息(驾驶员眼球位置信息由车内摄像头dms、座椅系统等给出,可选的直接在车辆can网络读取)和车辆姿态信息(车辆姿态信息根据每款车的高低设计数据设计,车辆姿态信息为固定值),得到驾驶员需求视野,然后根据驾驶员需求视野对进行光照处理后的剪裁,将图像上的无用或者冗余区域进行剪裁掉,使3d全息led风扇成像出的图像始终处于与驾驶员匹配的最优观察角度。
22.其中,根据驾驶员眼球位置信息和车辆姿态信息确定驾驶员需求视野的具体实现方式可以参“cn114228620a
ꢀ”
的技术手段;在确定驾驶员需求视野后,可以直接确定驾驶员需求视野所对应的这部分区域。如驾驶员开启倒车挡,则图像需要调节为主要显示汽车后轮与地面区域,驾驶员调节了座椅高度,则驾驶员的需求视野区域也发生变动。
23.处理装置20,在执行时,具体按照图2的如下流程执行:s201、图像畸变处理,可选的包含对摄像头成像进行矫正,适应人眼正常观察。
24.s202、图像清晰度处理,可选的包含对模糊部位进行多次成像对比合成清晰图像等。
25.s203、光照处理,包括强光抑制/弱光补偿,可选的包含计算强光部位采用过滤处理,弱光部位增强信号数据等。
26.s204、驾驶员需求视野自适应变换,可选的根据车辆内驾驶员眼球位置(可选的由dms直接给出)信息及车辆姿态信息(每款车的高低设计数据,固定值)进行综合计算,得出驾驶员需求视野;s205、区域剪裁,可选的保留s204驾驶员需求视野区域,剪裁掉无用或者冗余区域;s206、产生发光源及3d全息led风扇需求的转速信息,可选的采用lin等通信方式发送给全息显示模块。
27.全息显示装置30,包括用于替代车辆原外后视镜的3d全息led风扇,3d全息led风扇按照处理装置计算出的转速进行运转,将经过图像处理模块处理后的图像数据进行成像显示。
28.全息显示装置30基于环境亮度信息,在强光时,则改变3d全息led风扇的显示亮度,使太阳下亦可清晰可见,在夜间时,则降低亮度。3d全息led风扇还基于获取到的转速进行运转,最终自适应成像并适配标定,同时控制光源点亮区域和周期,完成空中成像。
29.本实施例上述方案,摄像头的采集范围更广,处理装置基于驾驶员需求视野将驾驶员所需求的这部分图像剪裁出,再利用替代原外后视镜的3d全息led风扇将其进行全息成像,由于3d全息led风扇成像的画面只包含驾驶员需求的这部分画面,因此,可以将3d全息led风扇的体积设置的比原有的外后视镜的体积更小,以此来减少风阻以及因风阻大导致的风噪;此外,3d全息led风扇的转速是基于其实时受到的风阻进行调整,能够保障所成
像的画面的实时性;3d全息led风扇的成像显示亮度是根据环境亮度进行调整,可以基于实际场景适应性的调整。本方案基于3d全息成像技术,在用户习惯的视线区域成像,该装置科技感强,体验新颖,且符合技术由机械向场效应发展的规律。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。