1.本发明属于自动驾驶技术领域,具体涉及一种驶经汇流口的分段控制方法和控制系统。
背景技术:
2.随着全球自动驾驶技术的飞速发展,隶属于l2驾驶自动化的组合辅助驾驶系统已日益普及。但缺乏v2x、激光雷达、高精地图和高算力控制器的低成本的组合辅助驾驶系统仍存在较多受限场景,行驶至该受限场景时,仍需驾驶员提前主动介入,特别是在体验感更佳的结构化道路上驶经汇流路口时,仍按照常规的巡航逻辑进行控制,会极大降低用户的安全感和驾驶体验。
3.现有技术中,如cn111127908a提供了一种用于车辆汇流的自动驾驶控制方法,判断本车在处于汇流区域并且即将通过道路的出口或者入口的情况下,计算本车与其他车辆的相对位置、车速等参数,并计算本车保持当前车速的情况下是否会与其他车辆相撞,并基于计算结果来采取相应的措施,使车辆能够安全地通过该汇流区域。但当目标车道车辆被护栏等遮挡时,本车并无法提前检测该车辆并计算碰撞风险,且该专利默认汇流车道车辆具备优先通行权,而实际上并非所有辅路车辆都会减速让行。
4.再如cn111192468a定义了本车要进入分流或汇流目标车道时,在过渡车道内的加、减速逻辑,同时也结合v2x、激光雷达等检测目标车道障碍物的碰撞风险,规划最优换道轨迹,实现安全、平稳的进入分流或汇流目标车道。但该专利基于当前不太成熟的v2x、成本较高的激光雷达等,是当下低成本的组合辅助驾驶系统无法实现的。
技术实现要素:
5.针对现有技术的上述不足,本发明要解决的技术问题是提供一种驶经汇流口的分段控制方法和控制系统,解决了基于当前低成本组合辅助驾驶系统方案,车辆驶经汇流口时的纵向控制策略需要优化、人为介入的概率需要降低的问题,取得确保系统控制的延续性、增强系统使用时的体验感的效果。
6.为解决上述技术问题,本发明采用如下技术方案:
7.一种驶经汇流口的分段控制方法,包括以下步骤:
8.判断本车是否处于汇流车道以及是否处于汇流区域,同时对汇入车道车辆和前方跟车车辆进行车辆检测;
9.获取本车、前方跟车车辆以及汇入车道车辆的汇流区域信息来预测汇入车辆汇流行为的可能性;
10.根据本车的汇流区域信息、汇入车辆汇流行为的可能性以及车辆检测所得的相关信息来调整本车的控制策略。
11.进一步完善上述技术方案,所述汇流区域信息包括:本车和前方跟车车辆所处的汇流区域位置、汇入车道车辆所处的汇流区域位置;
12.汇入车道和本车所在车道的汇流区域包括初段汇流区域、中段汇流区域和终段汇流区域;
13.本车的汇流区域信息还包括本车距离汇流路口起点的距离、距离汇流点的距离和距离汇流路口终点的距离。
14.进一步地,获取本车的汇流区域信息以及本车所处车道信息来判断本车是否处于汇流区域以及是否处于汇流车道;
15.车辆检测时,根据前方跟车车辆的横向位置、本车所在车道的车道线曲率筛选出汇入车道车辆、前方跟车车辆,并输出对应的相对横纵向距离、相对横纵向速度。
16.进一步地,根据本车所处汇流区域的位置、前方跟车车辆以及本车所处汇流区域的位置并结合汇流车道车辆与汇入车道车辆的相对纵向距离和纵向ttc来预测汇入车辆汇流行为的可能性;所述汇流车道车辆包括本车与前方跟车车辆,汇入车辆汇流行为的可能性包括高、较高、中、较低或低;
17.结合汇流车道车辆与汇入车道车辆的相对纵向距离预测的汇入车辆汇流行为可能性为第一可能性;
18.结合汇流车道车辆与汇入车道车辆的纵向ttc预测的汇入车辆汇流行为可能性为第二可能性;
19.将第一可能性与第二可能性相比较并选取较高的可能性作为最终的汇入车辆汇流行为的可能性conf并输出。
20.进一步地,定义所述汇入车辆汇流行为的可能性和汇入车辆汇流行为的可能性conf:
21.大于85%为高;65%-85%为较高;45%-65%为中;25%-45%为较低;小于25%为低。
22.进一步地,根据本车所处的汇流区域位置、汇入车辆汇流行为的可能性conf并结合本车分别与前方跟车车辆、汇入车道车辆的相对横纵向距离及相对横纵向速度来调整本车的控制策略;
23.调整本车的控制策略包括:
24.若本车不处于汇流车道,则维持原巡航控制策略;
25.若本车处于汇流车道,且前方有跟车车辆时,根据本车所处的汇流区域位置来调整控制策略;
26.若本车处于汇流车道,且前方无跟车车辆时,根据本车所处的汇流区域位置来调整控制策略。
27.进一步地,若本车处于汇流车道,且前方有跟车车辆时:
28.当本车驶入初段汇流区域后,按照最小时距进行巡航控制,并规划注意汇入车道车辆汇入本车所在车道的提示请求;
29.当本车驶入中段汇流区域和终段汇流区域后,且汇入车辆汇流行为的可能性conf为较高或高,规划出对应的减速度并控制本车减速,同时规划出对应的远离汇入车道的横向偏移量以及鸣笛请求,并升级注意汇入车道车辆汇入本车所在车道的提示请求;
30.当本车驶过终段汇流区域或无汇入车道车辆,恢复原巡航控制策略。
31.进一步地,若本车处于汇流车道,且前方无跟车车辆时:
32.根据本车距离汇流路口的起点距离提前规划出对应的减速度并控制本车减速到一个安全车速,若本车当前车速未超过该安全车速,则维持当前车速行驶;当本车到达汇流路口起点时,规划注意汇入车道车辆汇入本车所在车道的提示请求并规划鸣笛请求;
33.当本车到达汇流点时,且汇入车辆汇流行为的可能性conf为低或较低,或无汇入车道车辆时,恢复原巡航控制策略;
34.当本车到达汇流点时,且汇入车辆汇流行为的可能性conf为中时,维持所述安全车速行驶,并规划出对应的远离汇入车道的横向偏移量;
35.当本车到达汇流点时,且汇入车辆汇流行为的可能性conf为较高或高时,规划出对应的减速度并控制本车减速,同时规划出对应的远离汇入车道的横向偏移量以及鸣笛请求,并升级注意汇入车道车辆汇入本车所在车道的提示请求;
36.当本车驶过终段汇流区域或无汇入车道车辆,恢复原巡航控制策略。
37.进一步地,所述本车的控制策略还包括横纵向控制,根据规划的指定的减速度或横向偏移量发出加速、减速或转向控制命令并执行;
38.所述本车的控制策略还包括hmi交互控制,根据规划的鸣笛请求、注意汇入车道车辆汇入本车所在车道的提示请求或升级的注意汇入车道车辆汇入本车所在车道的提示请求来发出鸣笛请求以及视觉、听觉或触觉提示、报警请求并执行。
39.本发明还涉及一种驶经汇流口的分段控制系统,包括地图、传感器、控制器和执行器;
40.所述地图用于提供汇流区域信息以及本车所在车道信息;
41.所述传感器用于检测车辆周边的道路和环境信息;
42.所述控制器包括认知模块、目标融合模块、规划决策模块和控制模块;认知模块用于判断本车是否处于汇流区域以及是否处于汇流车道、预测汇入车辆汇流行为的可能性conf;目标融合模块用于将传感器检测到的相关信息进行融合,筛选目标车辆并输出对应的距离和速度信息;规划决策模块用于调整本车的控制策略;控制模块用于根据规划决策模块所规划的控制策略向执行器下发控制命令;
43.所述执行器用于执行来自控制模块的控制命令。
44.相比现有技术,本发明具有如下有益效果:
45.本发明的一种驶经汇流口的分段控制方法,基于当前低成本组合辅助驾驶系统方案,根据本车所处车道位置、是否处于跟车巡航状态、汇入车道是否有车辆、汇入车道车辆的相对纵向位置和相对车速、汇入车道车辆所处汇入车道的纵向位置以及汇入车辆的换道动作等来修订车辆驶经汇流口的纵向控制策略、hmi交互策略,从而实现在结构化道路上安全、舒适地通过汇流区域,同时还降低了人为介入的概率。
附图说明
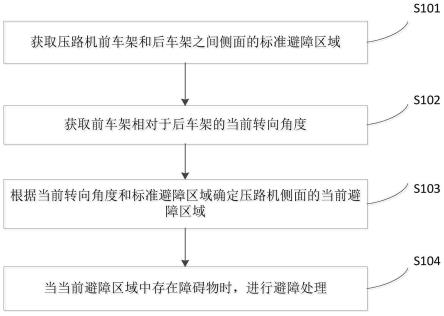
46.图1为实施例的一种驶经汇流口的分段控制方法的流程图;
47.图2为实施例的汇流区域的划分场景示意图;
48.图3为本发明中车辆行为预测的示意图;
49.图4为实施例的一种驶经汇流口的分段控制系统的结构框图。
具体实施方式
50.下面结合附图对本发明的具体实施方式作进一步的详细说明。
51.请参见图1-图3,具体实施例的一种驶经汇流口的分段控制方法,包括以下步骤:
52.判断本车是否处于汇流区域以及是否处于汇流车道,同时对汇入车道车辆和前方跟车车辆进行车辆检测;
53.获取本车、前方跟车车辆以及汇入车道车辆的汇流区域信息来预测汇入车辆汇流行为的可能性;
54.根据本车的汇流区域信息、汇入车辆汇流行为的可能性以及车辆检测所得的相关信息来调整本车的控制策略。
55.实施例的一种驶经汇流口的分段控制方法,基于当前低成本组合辅助驾驶系统方案,根据本车所处车道位置、是否处于跟车巡航状态、汇入车道是否有车辆、汇入车道车辆的相对纵向位置和相对车速、汇入车道车辆所处汇入车道的纵向位置以及汇入车辆的换道动作等来修订车辆驶经汇流口的纵向控制策略、hmi交互策略,从而实现在结构化道路上安全、舒适地通过汇流区域,同时还降低了人为介入的概率。
56.请参见图4,本发明还提供了一种驶经汇流口的分段控制系统,包括地图、传感器、控制器和执行器;
57.所述地图用于提供汇流区域信息以及本车所在车道信息;
58.所述传感器用于检测车辆周边的道路和环境信息;
59.所述控制器包括认知模块、目标融合模块、规划决策模块和控制模块;认知模块用于判断本车是否处于汇流区域以及是否处于汇流车道、预测汇入车辆汇流行为的可能性conf;目标融合模块用于将传感器检测到的相关信息进行融合,筛选目标车辆并输出对应的距离和速度信息;规划决策模块用于调整本车的控制策略;控制模块用于根据规划决策模块所规划的控制策略向执行器下发控制命令;
60.所述执行器用于执行来自控制模块的控制命令。
61.请继续参见图2,所述汇流区域信息包括:本车和前方跟车车辆所处的汇流区域位置、汇入车道车辆所处的汇流区域位置;汇入车道和本车所在车道的汇流区域包括初段汇流区域a1、中段汇流区域a2和终段汇流区域a3;本车的汇流区域信息还包括本车距离汇流路口起点的距离d1、距离汇流点的距离d2和距离汇流路口终点的距离d3。
62.其中,获取本车的汇流区域信息以及本车所处车道信息来判断本车是否处于汇流区域以及是否处于汇流车道。
63.实施时,判断本车是否处于汇流区域以及是否处于汇流车道,认知模块需根据车载传感器检测的周边车道线、护栏、路沿、标牌、地面标线和隔离桩、并结合车载地图提供的汇流区域信息以及本车所在车道信息来进行判断;当车辆未搭载高精地图时且摄像头未检测到可靠的汇流特征(包括地面标线、汇流标志)时,可以适当扩大常规的adas(高级驾驶辅助系统)地图提供的汇流区域;当车载地图未提供汇流区域信息以及本车所在车道信息时,认知模块也可以通过车载传感器所探测到的信息进行推测从而判断本车是否处于汇流区域以及是否处于汇流车道,具体方法如下:
64.车载传感器探测汇流标牌、护栏横向距离变化、车道线类型变化、车道线宽度变化、汇流口地面网格标线以及汇流口地面隔离柱来判断本车是否处于汇流区域;
65.车载传感器探测护栏距离本车的距离、最外侧车道线和路沿距离本车的距离,本车换道情况来判断本车是否处于汇流车道。
66.当然如果车载地图提供了汇流区域信息以及本车所在车道信息,也可根据上述方法来进行校验。
67.其中,车辆检测时,根据前方跟车车辆的横向位置、本车所在车道的车道线曲率筛选出汇入车道车辆、前方跟车车辆,并输出对应的相对横纵向距离、相对横纵向速度。
68.实施时,本车系统通过常见的辅助系统的超声波雷达、侧向毫米波雷达、前向毫米波雷达和前向摄像头实时检测“临道”车辆目标(即汇入车道车辆)的相对横纵向距离、相对横纵向速度;还通过前向毫米波雷达、前向摄像头实时检测前方巡航跟车目标(即前方跟车车辆)的相对横纵向距离、相对横纵向速度;目标融合模块将上述由传感器实时检测到的车辆目标进行融合后,根据前方跟车车辆的横向位置、本车所在车道的车道线曲率筛选出汇入车道车辆、前方跟车车辆,并输出对应的相对横纵向距离、相对横纵向速度。
69.其中,认知模块根据本车所处汇流区域的位置、前方跟车车辆以及本车所处汇流区域的位置并结合汇流车道车辆与汇入车道车辆的相对纵向距离和纵向ttc来预测汇入车辆汇流行为的可能性是高、较高、中、较低还是低;所述汇流车道车辆包括本车与前方跟车车辆;
70.结合汇流车道车辆与汇入车道车辆的相对纵向距离预测的汇入车辆汇流行为可能性为第一可能性;
71.结合汇流车道车辆与汇入车道车辆的纵向ttc预测的汇入车辆汇流行为可能性为第二可能性;
72.将第一可能性与第二可能性相比较并选取较高的可能性作为最终的汇入车辆汇流行为的可能性conf并输出给规划决策模块。
73.实施时,请参见图3,这里应把主路上的本车和前方跟车车辆当作一个整体来与汇入车道车辆进行相对纵向距离和纵向ttc的比较,其中具体的第一可能性和第二可能性的判定请参加下述两个表格:
74.结合相对纵向距离:
75.[0076][0077]
结合纵向ttc:
[0078][0079]
汇流车道车辆与汇入车道车辆的纵向ttc指的是汇流车道车辆与汇入车道车辆纵向的碰撞时间。
[0080]
且上表中若能识别的含义:指的是如果不能识别,则定义该可能性(第一可能性或第二可能性)为0。
[0081]
请继续参见图3,其中:
[0082]
汇入车辆1:处于本车或最近前车前方,相对纵向距离和纵向ttc大于0;
[0083]
汇入车辆2,处于最近前车最前方与本车最后方之间,或与本车有重叠(无前车时),相对纵向距离和纵向ttc默认为0;
[0084]
汇入车辆3,处于本车最后方之后,相对纵向距离和纵向ttc小于0。
[0085]
且这里可以理解的是,参见图2和图3,本发明所述的汇流车道,指的是通常意义上主路的邻车道存在汇入车道的车道,即图3中本车所处的车道;汇入车道指的是汇入车辆所在的车道。
[0086]
同时,对前述的汇入车辆汇流行为的可能性以及汇入车辆汇流行为的可能性conf
进行划分定义:
[0087]
大于85%为高,65%-85%为较高,45%-65%为中,25%-45%为较低,小于25%为低;
[0088]
在本发明实施例中,请参见图2,对所述初段汇流区域a1、中段汇流区域a2和终段汇流区域a3及逆行划分标定,且均沿主路的纵向距离进行划分:
[0089]
初段汇流区域a1的终点是汇流点前方20m处;
[0090]
终段汇流区域a3指的是距离汇流路口终点小于20m的这段汇流车道;
[0091]
中段汇流区域a2指的是初段汇流区域a1与终段汇流区域a3之间的汇流车道。
[0092]
这里需说明的是,上述参数仅是本发明实施例中所标定划分的参数,具体情况应根据本车的系统感知能力进行标定,但均应属于本发明的保护范围。
[0093]
其中,规划决策模块根据本车所处的汇流区域位置、汇入车辆汇流行为的可能性conf并结合本车分别与前方跟车车辆、汇入车道车辆的相对横纵向距离及相对横纵向速度来调整本车的控制策略。
[0094]
调整本车的控制策略包括:
[0095]
1)若本车不处于汇流车道,则维持原巡航控制策略;
[0096]
2)若本车处于汇流车道,且前方有跟车车辆时:
[0097]
当本车驶入初段汇流区域a1后,按照最小时距进行巡航控制,并规划注意汇入车道车辆汇入本车所在车道的提示请求;
[0098]
当本车驶入中段汇流区域a2和终段汇流区域a3后,且汇入车辆汇流行为的可能性conf为较高或高,规划出对应的减速度并控制本车减速,同时规划出对应的远离汇入车道的横向偏移量以及鸣笛请求,并升级注意汇入车道车辆汇入本车所在车道的提示请求;
[0099]
当本车驶过终段汇流区域a3或无汇入车道车辆,恢复原巡航控制策略;
[0100]
3)若本车处于汇流车道,且前方无跟车车辆时:
[0101]
根据本车距离汇流路口的起点距离d1提前规划出对应的减速度并控制本车减速到一个安全车速,若本车当前车速未超过该安全车速,则维持当前车速行驶;当本车到达汇流路口起点时(即d1=0),规划注意汇入车道车辆汇入本车所在车道的提示请求并规划鸣笛请求;
[0102]
当本车到达汇流点(即d2=0)时,且汇入车辆汇流行为conf的可能性为低或较低,或无汇入车道车辆时,恢复原巡航控制策略;
[0103]
当本车到达汇流点(即d2=0)时,且汇入车辆汇流行为的可能性conf为中时,维持所述安全车速行驶,并规划出对应的远离汇入车道的横向偏移量;
[0104]
当本车到达汇流点(即d2=0)时,且汇入车辆汇流行为的可能性conf为较高或高时,规划出对应的减速度并控制本车减速,同时规划出对应的远离汇入车道的横向偏移量以及鸣笛请求,并升级注意汇入车道车辆汇入本车所在车道的提示请求;
[0105]
当本车驶过终段汇流区域a3或无汇入车道车辆,恢复原巡航控制策略。
[0106]
其中,所述本车的控制策略还包括横纵向控制,控制模块根据规划决策模块规划的指定的减速度或横向偏移量发出加速、减速或转向控制命令给执行器并执行;所述本车的控制策略还包括hmi交互控制,控制模块根据规划决策模块规划的鸣笛请求、注意汇入车道车辆汇入本车所在车道的提示请求或升级的注意汇入车道车辆汇入本车所在车道的提
示请求来发出鸣笛请求以及视觉、听觉或触觉提示、报警请求给执行器并执行。
[0107]
这里,所述原巡航控制策略,均指的是本车驶入汇流车道前的巡航控制策略。
[0108]
实施时,hmi交互执行效果可采用如下形式(仅为举例说明):
[0109]
注意汇入车辆的提示请求,仅需触发视觉、听觉提示。其中,视觉提示包括文字提示(前方通过汇流口,请注意观察汇入车辆),以及仪表场景重构显示的汇流口、汇入车辆(若能识别到);听觉提示,可以采用三声“叮叮叮”信息提示音,也可以语音播报“前方通过汇流口,请注意观察汇入车辆”;
[0110]
升级的注意汇入车辆的提示请求,除强化“注意汇入车辆的提示请求”的提示效果外,还可采用触觉提示,如座椅震动。其中,强化的视觉提示包含文字提示(注意前方汇入车辆),仪表场景重构显示的汇入车辆(若能识别到)采用红色标注。听觉提示采用语音播报“注意前方汇入车辆”。
[0111]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。