1.本发明属于油烟处理技术领域,涉及但不限于一种油烟净化方法及其控制系统。
背景技术:
2.目前,不管是厨房烹饪,还是农村烧炕,都会产生大量的油烟,由于油烟中含有对人类健康有害且污染环境的成分,比如厨房油烟中含有醛、酮、烃、脂肪酸、醇、芳香族化合物、酯、内酯、杂环化合物、挥发性亚硝胺等有害物质,因此,如何处理油烟成为当前亟需解决的关键问题之一。
3.现有油烟净化方法中,将油烟由进风口进入机壳并穿过滤带,在被滤带净化后经出风口排出,将净化油烟后的滤带传送至脱附机构,将滤带上吸附饱和的高分子吸附材料脱附分离,将来自脱附机构的滤带引导至脱水机构进行挤压脱水,最后在滤带上涂覆高分子吸附村料,并传动滤带循环移动。
4.然而,由于现有油烟净化方法只有在实现吸附降解、脱附清洗、涂覆高分子吸附材料时才能完成油烟净化处理,从而导致油烟的净化效率不高且应用范围受限。
技术实现要素:
5.本发明的目的在于,针对上述现有技术在进行油烟净化处理的过程中存在的不足,提供一种油烟净化方法及其控制系统,以解决现有油烟净化方法只有在实现吸附降解、脱附清洗、涂覆高分子吸附材料时才能完成油烟净化处理,从而导致油烟的净化效率不高且应用范围受限的问题。
6.为实现上述目的,本发明实施例采用的技术方案如下:
7.第一方面,本发明提供了一种油烟净化方法,所述方法应用于油烟净化设备中,所述方法包括:
8.获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;
9.确定与所述目标特征参数匹配的目标处理策略;
10.根据所述目标处理策略,控制进行目标处理操作。
11.可选的,所述目标特征参数包括所述出气口处当前气体的当前浓度时,所述确定与所述目标特征参数匹配的目标处理策略,包括:
12.将所述当前浓度与预设参考浓度进行匹配,得到第一目标匹配结果;
13.当所述第一目标匹配结果表征所述当前浓度高于所述预设参考浓度时,确定包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略;
14.当所述第一目标匹配结果表征所述当前浓度低于所述预设参考浓度时,确定包括将目标油烟净化处理后产生的目标气体排出的目标处理策略。
15.可选的,所述根据所述目标处理策略,控制进行目标处理操作,包括:
16.当确定出包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略时,控制
增加高压电源的负高压、增大多针阴极与格栅阳极之间的间距以及增大喷头喷洒导电液体的喷洒量,得到第一目标调整后信息;
17.在所述第一目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
18.可选的,所述目标特征参数包括所述液箱的当前液位时,所述确定与所述目标特征参数匹配的目标处理策略,包括:
19.将所述当前液位与预设参考液位进行匹配,得到第二目标匹配结果;
20.当所述第二目标匹配结果表征所述当前液位高于所述预设参考液位时,确定包括执行针对液箱中液体的目标收集操作的目标处理策略;
21.当所述第二目标匹配结果表征所述当前液位低于所述预设参考液位时,确定包括继续执行目标油烟净化操作的目标处理策略。
22.可选的,所述根据所述目标处理策略,控制进行目标处理操作,包括:
23.当确定出包括执行针对液箱中液体的目标收集操作的目标处理策略时,控制执行针对液箱中液体的目标过滤操作以及过滤操作后产生的目标杂质的目标收集操作,得到第二目标调整后信息;
24.在所述第二目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
25.可选的,所述目标特征参数包括所述多针阴极的当前处理时长时,所述确定与所述目标特征参数匹配的目标处理策略,包括:
26.将所述当前处理时长与预设参考处理时长进行匹配,得到第三目标匹配结果;
27.当所述第三目标匹配结果表征所述当前处理时长达到所述预设参考处理时长时,确定包括执行控制加热棒进行目标加热操作的目标处理策略;
28.当所述第三目标匹配结果表征所述当前处理时长未达到所述预设参考处理时长时,确定包括继续执行目标油烟净化操作的目标处理策略。
29.可选的,所述根据所述目标处理策略,控制进行目标处理操作,包括:
30.当确定出包括执行控制加热棒进行目标加热操作的目标处理策略时,控制执行针对多针阴极的目标加热处理操作,得到第三目标调整后信息;
31.在所述第三目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
32.第二方面,本发明提供了一种油烟净化设备,所述设备包括:进气口、多孔板、壳体、液箱、多针阴极、格栅阳极、泵、喷头、出气口以及控制器;
33.其中,所述进气口和所述出气口分别设置在所述壳体的不同侧,所述壳体设置在所述液箱的上方,所述多孔板设置在所述壳体的内部且在所述出气口与所述多针阴极之间,所述多针阴极和所述格栅阳极设置在所述壳体的内部,所述泵设置在所述液箱的内部,所述喷头设置在所述格栅阳极上,所述控制器分别与所述多针阴极、所述格栅阳极、所述喷头以及所述液箱连接。
34.第三方面,本发明提供了一种油烟净化装置,所述装置包括:获取模块、确定模块和处理模块,其中:
35.获取模块,用于获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包
括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;
36.确定模块,用于确定与所述目标特征参数匹配的目标处理策略;
37.处理模块,用于根据所述目标处理策略,控制进行目标处理操作。
38.第四方面,本发明提供了一种油烟净化控制装置,所述控制装置包括:处理器和存储器,所述存储器用于存储指令,所述处理器用于执行所述存储器中存储的指令,以使所述控制装置执行所述如前述第一方面所述的油烟净化方法。
39.本发明的有益效果是:本发明中的一种油烟净化方法及其控制系统,其中油烟净化方法应用于油烟净化设备中,所述方法包括:获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;确定与所述目标特征参数匹配的目标处理策略;根据所述目标处理策略,控制进行目标处理操作。也就是说,本发明能够根据出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长,实现去除油烟中的焦油、水雾、颗粒物、油滴以及有机废气分子的目的,解决了现有油烟净化方法只有在实现吸附降解、脱附清洗、涂覆高分子吸附材料时才能完成油烟净化处理,从而导致油烟的净化效率不高且应用范围受限的问题,提高了油烟的净化效率,并且降低了能耗,从而在环境领域具有广泛的应用前景,也大大提高了油烟净化设备的使用寿命。
附图说明
40.为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图。
41.图1为本发明一实施例提供的油烟净化方法流程示意图;
42.图2a为本发明另一实施例提供的油烟净化设备结构示意图;
43.图2b为本发明另一实施例提供的多针阴极示意图;
44.图2c为本发明另一实施例提供的多针阴极与加热棒的连接关系示意图;
45.图3为本发明又一实施例提供的油烟净化装置示意图;
46.图4为本发明另一实施例提供的油烟净化控制装置示意图。
具体实施方式
47.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
48.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
49.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一
个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
50.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
51.此外,术语“水平”、“竖直”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
52.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
53.首先对本发明所涉及的名词进行解释:
54.静电除尘,静电除尘是气体除尘方法的一种。含尘气体经过高压静电场时被电分离,尘粒与负离子结合带上负电后,趋向阳极表面放电而沉积。在冶金、化学等工业中用以净化气体或回收有用尘粒。利用静电场使气体电离从而使尘粒带电吸附到电极上的收尘方法。在强电场中空气分子被电离为正离子和电子,电子奔向正极过程中遇到尘粒,使尘粒带负电吸附到正极被收集。
55.图1为本发明一实施例提供的油烟净化方法流程示意图;图2a为本发明另一实施例提供的油烟净化设备结构示意图,图2b为本发明另一实施例提供的多针阴极示意图,图2c为本发明另一实施例提供的多针阴极与加热棒的连接关系示意图;图3为本发明又一实施例提供的油烟净化装置示意图;图4为本发明另一实施例提供的油烟净化控制装置示意图。以下将结合图1至图4,对本发明实施例所提供的油烟净化方法及其控制系统进行详细说明。
56.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
57.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
58.本发明的实施例提供的油烟净化方法,应用于油烟净化设备中,并且该油烟净化方法的执行主体为油烟净化设备中的控制器,如图1所示为油烟净化方法流程示意图,下面结合图1,对该方法包括的步骤进行具体介绍。
59.步骤s101、获取油烟净化设备内的目标特征参数。
60.其中,油烟中的主要成分可以包括焦油、水雾、颗粒物、油滴和部分有机废气分子,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长。
61.具体的,油烟净化设备中可以设置有传感器,传感器可以用于检测油烟净化设备的目标特征参数,也即传感器可以检测油烟净化设备的出气口处当前气体的当前浓度、液
箱的当前液位和/或多针阴极的当前处理时长,并将所检测到的当前浓度、当前液位和/或当前处理时长发送至控制器。因此,控制器可以接收到传感器检测的出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长。
62.此外,控制器在获取油烟净化设备的目标特征参数时,可以单独获取,也可以同时获取,比如可以先获取出气口处当前气体的当前浓度、再获取液箱的当前液位、后获取多针阴极的当前处理时长,也可以先获取液箱的当前液位、再获取多针阴极的当前处理时长、后获取出气口处当前气体的当前浓度,也可以先获取多针阴极的当前处理时长、再获取出气口处当前气体的当前浓度、后获取液箱的当前液位,也可以同时获取出气口处当前气体的当前浓度、液箱的当前液位和多针阴极的当前处理时长。此处不作具体限定。
63.并且,控制器可以实时获取油烟净化设备的目标特征参数,也可以周期性的获取油烟净化设备的目标特征参数。此处也不做具体限定。
64.步骤s102、确定与所述目标特征参数匹配的目标处理策略。
65.具体的,控制器在接收到传感器发送过来的目标特征参数时,可以将目标特征参数与预设参考特征信息进行匹配,以此获取与目标特征参数匹配的目标处理策略;其中,当目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长时,预设参考特征信息可以包括预设参考浓度、预设参考液位和/或预设参考处理时长。
66.因此,当目标特征参数包括油烟净化设备的出气口处当前气体的当前浓度时,步骤s102可以通过以下子步骤实现:
67.步骤s1021、将所述当前浓度与预设参考浓度进行匹配,得到第一目标匹配结果。
68.其中,预设参考浓度可以用于表征气体的浓度足以说明该气体为符合排放标准的干净气体;并且,预设参考浓度可以是参考浓度阈值,也可以是参考浓度范围。此处不作限定。
69.具体的,控制器在经由传感器获取到出气口处当前气体的当前浓度时,可以进一步将当前浓度与预设参考浓度进行匹配,比如将当前浓度与参考浓度阈值进行大小比较,或者将当前浓度分别与参考浓度范围的最大值和最小值进行大小比较,从而得到第一目标匹配结果。
70.步骤s1022、当所述第一目标匹配结果表征所述当前浓度高于所述预设参考浓度时,确定包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略。
71.具体的,控制器确定第一目标匹配结果表征出气口处当前气体的当前浓度高于预设参考浓度时,可以认为进入油烟净化设备内的油烟中含有的焦油、水雾、颗粒物、油滴及有机废气分子未被处理达标且不符合排放标准,此时可以确定包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略,以使得进入油烟净化设备内的烟气经过净化处理后产生符合排放标准的干净气体,出气口处当前气体的当前浓度高于预设参考浓度可以包括当前浓度高于参考浓度阈值或者当前浓度大于参考浓度范围的最大值。
72.在实际处理过程中,油烟净化设备的内部可以包括多个油烟净化单元且每个油烟净化单元包括多针阴极、格栅阳极、喷头,液箱和泵可以均为一个且泵可以将液箱中的液体抽到每个油烟净化单元的格栅阳极的喷头中进行喷洒,以此保证出气口处输出的气体为符合排放标准且不会产生二次污染的干净气体,液箱中的液体可以为水。
73.步骤s1023、当所述第一目标匹配结果表征所述当前浓度低于所述预设参考浓度时,确定包括将目标油烟净化处理后产生的目标气体排出的目标处理策略。
74.具体的,控制器确定第一目标匹配结果表征出气口处当前气体的当前浓度低于预设参考浓度时,可以认为进入油烟净化设备内的油烟中含有的焦油、水雾、颗粒物、油滴及有机废气分子已被处理干净且符合排放标准,此时可以确定包括将目标油烟净化处理后产生的目标气体排出的目标处理策略,以使得将通过油烟净化后产生符合空气排放标准的干净气体排出;其中,出气口处当前气体的当前浓度低于预设参考浓度可以包括当前浓度小于等于参考浓度阈值、当前浓度低于参考浓度范围的最小值或者当前浓度在参考浓度范围的最小值和最大值之间。
75.在实际处理过程中,当目标特征参数包括油烟净化设备中液箱的当前液位时,步骤s102可以通过以下子步骤实现:
76.步骤s11、将所述当前液位与预设参考液位进行匹配,得到第二目标匹配结果。
77.其中,预设参考液位可以用于表征液箱的液位足以说明该液箱中焦油、颗粒物和/或油滴等其它杂质的含量超标且易造成液箱中的液体溢出或者净化处理效果降低。并且,预设参考液位可以是参考液位阈值,也可以是参考液位范围。此处不作限定。
78.具体的,控制器在获取到油烟净化设备中液箱的当前液位时,可以进一步将当前液位与预设参考液位进行匹配,比如将当前液位与参考液位阈值进行大小比较,或者将当前液位分别与参考液位范围的最大值和最小值进行大小比较,从而得到第二目标匹配结果。其中,油烟净化设备中液箱的当前液位可以经由液箱中设置的液位探测器获取。
79.步骤s12、当所述第二目标匹配结果表征所述当前液位高于所述预设参考液位时,确定包括执行针对液箱中液体的目标收集操作的目标处理策略。
80.具体的,控制器确定第二目标匹配结果表征油烟净化设备中液箱的当前液位高于预设参考液位时,可以认为油烟中的焦油、水雾、颗粒物、油滴及有机废气分子先经多针阴极发射的电子吸附、后经格栅阳极喷洒的液体淋湿后掉落至液箱中导致液箱的液体即将溢出以及油烟净化处理效果降低,此时可以确定包括执行针对液箱中液体的目标收集操作的目标处理策略,以此液箱中的液体能够不溢出且能够高效去除油烟中的焦油、水雾、颗粒物、油滴及有机废气分子;其中,油烟净化设备中液箱的当前液位高于预设参考液位可以包括当前液位高于参考液位阈值或者当前液位大于参考液位范围的最大值。
81.步骤s13、当所述第二目标匹配结果表征所述当前液位低于所述预设参考液位时,确定包括继续执行目标油烟净化操作的目标处理策略。
82.具体的,控制器确定第二目标匹配结果表征油烟净化设备中液箱的当前液位低于预设参考液位时,可以认为油烟中的焦油、水雾、颗粒物、油滴及有机废气分子先经多针阴极发射的电子吸附、后经格栅阳极喷洒的液体淋湿后掉落至液箱中不会导致液箱的液体溢出且能够保证油烟净化处理效果,此时可以确定包括继续执行目标油烟净化操作的目标处理策略,以使得进入油烟净化设备内的油烟都能被高效且快速处理为符合排放标准且不会产生二次污染的干净气体;其中,油烟净化设备中液箱的当前液位低于预设参考液位可以包括当前液位小于等于参考液位阈值、当前液位低于参考液位范围的最小值或者当前液位在参考液位范围的最小值和最大值之间。
83.在实际处理过程中,当目标特征参数包括油烟净化设备中多针阴极的当前处理时
长时,步骤s102可以通过以下子步骤实现:
84.步骤s21、将所述当前处理时长与预设参考处理时长进行匹配,得到第三目标匹配结果。
85.其中,预设参考处理时长可以用于表征多针阴极发射电子且电子与油烟中的焦油、水雾、颗粒物、油滴及有机废气分子触碰的时长足以说明该多针阴极的表面即将结焦。并且,预设参考处理时长可以是参考处理时长阈值,也可以是参考处理时长范围。此处不作限定。
86.具体的,控制器在经由传感器获取到油烟净化设备中多针阴极的当前处理时长时,可以进一步将当前处理时长与预设参考处理时长进行匹配,比如将当前处理时长与参考处理时长阈值进行大小比较,或者将当前处理时长分别与参考处理时长范围的最大值和最小值进行大小比较,从而得到第三目标匹配结果。
87.步骤s22、当所述第三目标匹配结果表征所述当前处理时长达到所述预设参考处理时长时,确定包括执行控制加热棒进行目标加热操作的目标处理策略。
88.具体的,控制器确定第三目标匹配结果表征油烟净化设备中多针阴极的当前处理时长高于预设参考处理时长时,可以认为多针阴极的表面即将结焦,此时可以确定执行控制加热棒进行目标加热操作的目标处理策略,以此实现多针阴极继续高效且快速处理油烟净化操作的目的;其中,油烟净化设备中多针阴极的当前处理时长高于预设参考处理时长可以包括当前处理时长高于参考处理时长阈值或者当前处理时长大于参考处理时长范围的最大值。
89.步骤s23、当所述第三目标匹配结果表征所述当前处理时长未达到所述预设参考处理时长时,确定包括继续执行目标油烟净化操作的目标处理策略。
90.具体的,控制器确定第三目标匹配结果表征油烟净化设备中多针阴极的当前处理时长低于预设参考处理时长时,可以认为多针阴极的表面没有结焦趋势且能够继续处理油烟,此时可以确定继续执行目标油烟净化操作的目标处理策略,以使得进入油烟净化设备内的油烟都能被高效且快速处理为符合排放标准且不会产生二次污染的干净气体;其中,油烟净化设备中多针阴极的当前处理时长低于预设参考处理时长可以包括当前处理时长小于等于参考处理时长阈值、当前处理时长低于参考处理时长范围的最小值或者当前处理时长在参考处理时长范围的最小值和最大值之间。
91.在实际处理过程中,当控制器获取到的目标特征参数中包括出气口处当前气体的当前浓度、液箱的当前液位和多针阴极的当前处理时长时,可以进一步将当前浓度与预设参考浓度进行匹配、将当前液位与预设参考液位进行匹配,以及将当前处理时长与预设参考处理时长进行匹配,以此得到第一匹配结果、第二匹配结果和第三匹配结果,从而确定出与第一匹配结果、第二匹配结果和第三匹配结果均对应的目标处理策略。具体的匹配过程如前述实施例所述,此处不再赘述。
92.步骤s103、根据所述目标处理策略,控制进行目标处理。
93.在实际处理过程中,步骤s103的具体实现过程可以包括如下子步骤:
94.步骤s1031、当确定出包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略时,控制增加高压电源的负高压、增大多针阴极与格栅阳极之间的间距以及增大喷头喷洒导电液体的喷洒量,得到第一目标调整后信息。
95.具体的,控制器确定出包括增加高压电源的负高压以及喷头的喷洒量的目标处理策略时,可以认为进入油烟净化设备内的油烟中含有的焦油、水雾、颗粒物、油滴及有机废气分子未被处理达标且不符合排放标准,此时控制器可以增加高压电源的负高压、增大多针阴极与格栅阳极之间的间距以及增大喷头喷洒导电液体的喷洒量,以此实现将烟气处理为达标气体且不会产生二次污染的目的。
96.其中,第一目标调整后信息可以包括高压电源的负高压被增加后的调整后负高压、多针阴极与格栅阳极之间的间距被增加后的调整后间距以及喷头喷洒导电液体的喷洒量被增加后的调整后喷洒量。
97.步骤s1032、在所述第一目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
98.具体的,控制器可以控制油烟净化设备在第一目标调整后信息的作用下,对进入油烟净化设备内的烟气进行目标油烟净化操作,以使得经处理后产生符号排放标准且不会产生二次污染的干净气体。
99.在实际处理过程中,步骤s103还可以通过以下过程实现:
100.步骤s21、当确定出包括执行针对液箱中液体的目标收集操作的目标处理策略时,控制执行针对液箱中液体的目标过滤操作以及过滤操作后产生的目标杂质的目标收集操作,得到第二目标调整后信息。
101.具体的,控制器确定出包括执行针对液箱中液体的目标收集操作的目标处理策略时,可以认为液箱中液体即将溢出且焦油、水雾、颗粒物、油滴的含量超标,此时控制器可以控制液箱中的液体先进行过滤操作、再将过滤操作后产生的目标杂质收集且排出,以此实现继续高效执行烟气净化操作的目的。其中,目标杂质中可以包括焦油、颗粒物、油滴等。
102.其中,第二目标调整后信息可以用于表征液箱中的液体被执行过滤操作后产生的目标杂质被收集且取走。
103.步骤s22、在所述第二目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
104.具体的,控制器可以控制油烟净化设备在第二目标调整后信息的作用下,对进入油烟净化设备内的烟气继续进行目标油烟净化操作,以使得经处理后产生符号排放标准且不会产生二次污染的干净气体。
105.在实际处理过程中,步骤s103还可以通过以下过程实现:
106.步骤s31、当确定出包括执行控制加热棒进行目标加热操作的目标处理策略时,控制执行针对多针阴极的目标加热处理操作,得到第三目标调整后信息。
107.具体的,控制器确定出包括执行控制加热棒进行目标加热操作的目标处理策略时,可以认为进入多针阴极的表面即将结焦,此时控制器可以控制电热棒产生热量,以此使得多针阴极发热,从而使得多针阴极的表面不会变脏(比如不沾污焦油等)。
108.其中,第三目标调整后信息可以用于表征加热棒已开始发热且能够使得多针阴极的表面不会变脏或者保持干净。
109.步骤s32、在所述第三目标调整后信息的作用下,控制进行针对进入壳体内油烟的目标油烟净化操作。
110.具体的,控制器可以控制油烟净化设备在第三目标调整后信息的作用下,对进入
油烟净化设备内的烟气继续进行目标油烟净化操作,以使得经处理后产生符号排放标准且不会产生二次污染的干净气体。
111.在实际处理过程中,当控制器确定出包括将目标油烟净化处理后产生的目标气体排出的目标处理策略时,可以认为进入油烟净化设备内的烟气已被处理干净且不会产生二次污染,此时可以将目标油烟净化操作后产生的目标气体经由出气口排出,以便于排放至空气中或者回收利用。
112.其中,目标气体中可以包括一氧化氮、二氧化碳、水蒸气等其它符合排放标准的气体。
113.此外,当控制器确定出包括继续执行目标油烟净化操作的目标处理策略时,可以认为油烟净化设备还能够继续进行油烟净化处理操作,从而可以控制油烟净化设备继续执行针对油烟的净化处理操作。
114.本发明实施例中,本发明的油烟净化方法应用于油烟净化设备中,所述方法包括:获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;确定与所述目标特征参数匹配的目标处理策略;根据所述目标处理策略,控制进行目标处理操作。也就是说,本发明能够根据出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长,实现去除油烟中的焦油、水雾、颗粒物、油滴以及有机废气分子的目的,解决了现有油烟净化方法只有在实现吸附降解、脱附清洗、涂覆高分子吸附材料时才能完成油烟净化处理,从而导致油烟的净化效率不高且应用范围受限的问题,提高了油烟的净化效率,并且降低了能耗,从而在环境领域具有广泛的应用前景,也大大提高了油烟净化设备的使用寿命。
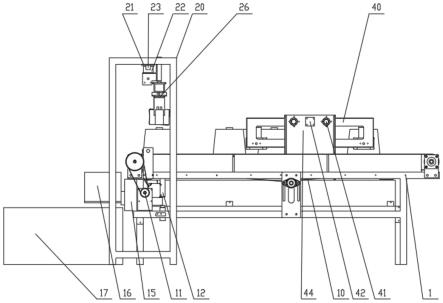
115.在另一种可行的实施例中,本发明还提供了一种油烟净化设备,如图2a所示,所述设备包括:壳体1、进气口2、多孔板3、耐高压绝缘端子4、绝缘保护套5、多针阴极6、喷头7、格栅阳极8、液箱9、泵10、过滤网11、出气口12。
116.其中,进气口2和出气口12可以分别设置在壳体1的不同侧,壳体1可以设置在液箱9的上方,多孔板3可以设置在壳体1的内部且可以在出气口12与多针阴极6之间,多针阴极6和格栅阳极8可以设置在壳体1的内部,泵10可以设置在液箱9的内部,喷头7可以设置在格栅阳极8上。
117.需要注意的是,壳体1和格栅阳极8均可以通过接地的方式避免触电,保证人身安全。
118.本发明实施例中,多针阴极6和格栅阳极8为一个湿法静电除尘处理单元时,壳体1的内部可以包括多个湿法静电除尘处理单元且卧式串联。
119.可选的,进气口2设置在壳体1的一侧且可以用于向壳体1的内部输入油烟,油烟中可以包括焦油、水雾、颗粒物、油滴、有机废气分子等其它污染物分子。
120.可选的,多孔板3可以用于将输入至壳体1内的油烟进行均气处理,以使得烟气集中流向多针阴极6内。
121.本发明实施例中,多针阴极6可以包括带多个针尖的回形折弯板电极且可以由一条带针尖的金属折叠而成,多针阴极6为耐高温且耐腐蚀的金属材料。
122.可选的,多针阴极6采用钨材料、钼材料制作而成。
123.需要说明的是,多针阴极6上之所以设置多个针尖,是由于多个针尖容易击穿,能
够更好放电。
124.本发明实施例中,多针阴极6与壳体1之间可以设置两个耐高压绝缘端子4,两个耐高压绝缘端子4可以分别外接一个绝缘保护套5。
125.可选的,两个耐高压绝缘端子4可以设置在多针阴极6与壳体1之间的两个连接处。
126.需要注意的是,由于多针阴极6与高压电源连接且会产生负高压,所以需要在多针阴极6与壳体1之间设置耐高压绝缘端子,以避免触电,保证人身安全。并且,为了提高耐高压绝缘端子6的使用寿命,可以设置每个耐高压绝缘端子6外接一个绝缘保护套5,以此延长其使用时长。
127.本发明实施例中,所述设备还包括高压电源,高压电源的高压阴极与多针阴极6连接。
128.可选的,如图2b所示的多针阴极示意图,当多针阴极4如图2b所示的回形折弯板电极时,多针电极4的两个端点之间可以连接高压电源,高压电源可以用于产生负高压。
129.可选的,多针阴极6与格栅阳极8之间的间距可以为4cm~20cm,高压电源的负高压可以为-4kv~30kv。
130.需要说明的是,多针阴极6与格栅阳极8之间的间距可以根据高压电源产生的负高压确定,当高压电源产生的负高压增大时,多针阴极6与格栅阳极8之间的间距随之增大,相反,当高压电源产生的负高压减小时,多针阴极6与格栅阳极8之间的间距随之减小。
131.本发明实施例中,喷头7的数量可以为两个且可以分别设置在格栅阳极8的顶端与底端,两个喷头7分别与泵10连接。
132.本发明实施例中,所述设备还可以包括过滤网11,过滤网11可以设置在泵10的周围,过滤网11可以用于阻挡颗粒物、焦油等杂质进入泵11。
133.本发明实施例中,格栅阳极8可以包括交叉喷淋区,交叉喷淋区的内部中间可以采用金属扭线刷填充,格栅阳极8可以为不锈钢网孔板制作的格栅结构。
134.需要说明的是,当液箱9中的液体在泵10以及喷头7的作用下向格栅阳极8上喷洒液体时,可以在格栅阳极8上形成交叉喷淋区,以使得喷洒在格栅阳极8上的液体形成水墙并与由多针阴极6流动过来的带电颗粒物、带电油滴以及带电有机废气分子等其它带电污染物分子充分接触,使其完全被液体湿润透,因此,格栅阳极8会在吸附带电颗粒物、带电油滴以及带电有机废气分子等其它带电污染物分子时被喷头7喷洒的液体淋湿,从而在重力作用下从格栅阳极8的表面及内部掉落至液箱9中。
135.本发明实施例中,所述设备还可以包括水位探测器、加热棒13和导电剂,水位探测器和导电剂可以分别设置在液箱9的内部,加热棒13可以与多针阴极6连接。
136.可选的,加热棒13可以为交流电,且加热棒13为交流电时其与多针阴极6之间的连接关系可以如图2c所示,图2c中的两个黑色实心点可以表示多针阴极6的两端且两端可以带有高压负电。
137.可选的,液箱9中的液体可以为水,水中包括的导电剂可以为氯化钠,水中设置的水位探测器可以用于实时或者周期性地检测当前水位,以根据当前水位确定是否要向液箱9中再次注入水。
138.需要说明的是,为了避免格栅阳极8处理一段时间表面结焦,可以通过间歇控制加热棒13发的方式来控制格栅阳极8的表面发热的方式,实现格栅阳极8的表面干净且不结焦
的目的。
139.本发明实施例中,油烟从进气口1进入壳体1的内部时,先经由多孔板3进行均气处理,使得烟气集中且均匀地流向多针阴极6,然后多针阴极6在向格栅阳极发射电子时烟气中的焦油、水雾、颗粒物、油滴、有机废气分子等其它污染物分子均会接触到电子,以此产生带电颗粒物、带电油滴、带电焦油以及带电有机废气分子等其它带电污染物分子,这些带电污染物分子会在泵10和液箱10的作用下与喷头7喷洒的带电液体充分接触且被喷头7喷洒的带电液体淋湿,从而在重力作用下从格栅阳极8的表面及内部掉落至液箱9中,经格栅阳极8处理后产生的干净气体可经由出气口12排出,未被电子附着的遗漏污染物分子也可在带电液体的作用下以及重力作用下掉落至液箱9中。当所述设备包括多个湿法静电除尘处理单元时,可重复多次,从而实现对油烟的高效且快速净化处理。
140.其中,干净气体可以包括一氧化氮、二氧化碳、水蒸气等其它符合排放标准的气体。
141.本发明实施例中公开的,一种油烟净化设备,包括:进气口、多孔板、壳体、液箱、多针阴极、格栅阳极、泵、喷头以及出气口;其中,所述进气口和所述出气口分别设置在所述壳体的不同侧,所述壳体设置在所述液箱的上方,所述多孔板设置在所述壳体的内部且在所述出气口与所述多针阴极之间,所述多针阴极和所述格栅阳极设置在所述壳体的内部,所述泵设置在所述液箱的内部,所述喷头设置在所述格栅阳极上。也就是说,本发明在多孔板、液箱、多针阴极、格栅阳极、泵以及喷头的作用下,通过采用高压静电除尘原理,能够使得阴极不会变脏的同时阳极采用交叉喷淋,从而达到去除油烟中所有焦油、水雾、颗粒物、油滴以及部分有机废气的目的,大大提高了油烟的处理效率,具有结构简单、易操作、成本低、可靠性高、可连续运行的优点,可广泛用于厨房油烟、含焦油气体、含细尘粒气体的预处理,在环保领域具有广泛应用,从而大大提高了油烟净化设备的使用寿命。
142.如图3所示为本发明实施例中提供的油烟净化装置,如图3所示,该油烟净化装置包括:获取模块301、确定模块302和处理模块303,其中:获取模块301,用于获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;确定模块302,用于确定与所述目标特征参数匹配的目标处理策略;处理模块303,用于根据所述目标处理策略,控制进行目标处理操作。
143.需要说明的是,本实施例中与其它实施例中相同步骤和相同内容的说明,可以参照其它实施例中的描述,此处不再赘述。
144.本发明中的一种油烟净化装置,所述装置包括:获取模块,用于获取油烟净化设备内的目标特征参数;其中,所述目标特征参数包括出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长;确定模块,用于确定与所述目标特征参数匹配的目标处理策略;处理模块,用于根据所述目标处理策略,控制进行目标处理操作。也就是说,本发明能够根据出气口处当前气体的当前浓度、液箱的当前液位和/或多针阴极的当前处理时长,实现去除油烟中的焦油、水雾、颗粒物、油滴以及有机废气分子的目的,解决了现有油烟净化方法只有在实现吸附降解、脱附清洗、涂覆高分子吸附材料时才能完成油烟净化处理,从而导致油烟的净化效率不高且应用范围受限的问题,提高了油烟的净化效率,并且降低了能耗,从而在环境领域具有广泛的应用前景,也大大提高了油烟净化设备的使用寿命。
145.图4为本发明另一实施例提供的油烟净化控制装置示意图,该控制装置可以集成
于终端设备或者终端设备的芯片,并且该装置包括:存储器401、处理器402。
146.存储器401用于存储程序,处理器402调用存储器401存储的程序,以执行上述方法实施例。具体实现方式和技术效果类似,这里不再赘述。
147.优选地,本发明还提供一种计算机可读存储介质,包括程序,该程序在被处理器执行时用于执行上述方法实施例。
148.在本发明所提供的几个实施例中,应该理解到,所揭露的装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
149.作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
150.另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用硬件加软件功能单元的形式实现。
151.上述以软件功能单元的形式实现的集成的单元,可以存储在一个计算机可读取存储介质中。上述软件功能单元存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)或处理器(英文:processor)执行本发明各个实施例方法的部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(英文:read-only memory,简称:rom)、随机存取存储器(英文:random access memory,简称:ram)、磁碟或者光盘等各种可以存储程序代码的介质。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。