1.本实用新型涉及玻璃磨边机领域,尤其涉及一种适用于磨边机辊轴的质检传送装置。
背景技术:
2.现有的玻璃磨边机中,为限制待加工玻璃的位置或前进,大多采用辊轴轮对玻璃产生压力。
3.如中国专利cn201970169u公开的立式玻璃磨边机卷帘机构,包括上卷帘机构和下卷帘机构;上卷帘机构包括上卷帘轴、压辊轴、减速机及伺服电机;上卷帘轴的两端固定连接在轴承座内,轴承座通过内六角螺钉固定连接在立式玻璃磨边机的上端机架上;下卷帘机构包括下卷帘轴、减速机及伺服电机;下卷帘轴的两端固定连接在吊架板内,吊架板通过内六角螺钉固定连接在立式玻璃磨边机的机架上;上、下卷帘轴的动力输入端通过联轴器与减速机的输出端固定了连接,伺服电机的动力输入端与减速机固定连接。
4.目前,类似于对这种玻璃磨边机用压辊轴的组装,大多采用人工上轮,再进行人工转移,之后进行检测。流程繁琐、劳动强度大、工作效率低和存在安全隐患等问题。
技术实现要素:
5.本实用新型提出了一种适用于磨边机辊轴的质检传送装置,解决了压辊轴生产流程中存在加工流程繁琐、劳动强度大、工作效率低和存在安全隐患等问题。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种适用于磨边机辊轴的质检传送装置,包括主体框架、输入部分、检测部分、传送部分、暂存部分、活动盘部分、智能控制部分。
8.所述主体框架包括基座、承重座、定位柱、承接柱、“l”形支柱一和“l”形支柱二。
9.所述基座包括长方体中空容器一。
10.所述长方体中空容器一上底板上设置两个圆形通孔一和两个圆形通孔二;圆形通孔二位于圆形通孔一的内侧。
11.所述承重座包括长方体中空容器二,所述长方体中空容器二设置于长方体中空容器一上底板上。
12.所述长方体中空容器二上底板上等距设置若干个长方形通孔二。
13.所述定位柱设置于长方体中空容器一上底板上,且定位柱位于长方体中空容器二的前侧和后侧。
14.所述承接柱设置于长方体中空容器一上底板上,且承接柱位于长方体中空容器二的左侧。
15.所述承接柱的上端设置“u”形开口通槽一。
16.所述“l”形支柱一和“l”形支柱二均设置于长方体中空容器一上底板上;“l”形支柱一和“l”形支柱二呈矩形分布;“l”形支柱一高于“l”形支柱二。
17.所述输入部分包括滑轨一、辅助杆一、定位卡块和“u”形固定柱。
18.所述辅助杆一的一端销轴连接于定位柱上。
19.所述定位卡块设置于辅助杆一上,且辅助杆一与“u”形开口通槽一相适配。
20.所述滑轨一设置于辅助杆一上;且滑轨一长于辅助杆一。
21.所述“u”形固定柱的两端分别设置于两个辅助杆一上。
22.所述检测部分包括尺寸检测机构和质量检测机构。
23.所述尺寸检测机构包括推杆电机一和检测盒。
24.所述推杆电机一通过安装架设置于长方体中空容器一内。
25.所述检测盒通过连接柱设置于推杆电机一的活动端,且检测盒位于圆形通孔一的上方,连接柱滑动连接于圆形通孔一内。
26.所述检测盒包括长方体中空容器三和距离传感器模块一。
27.所述长方体中空容器三靠近长方体中空容器二的侧板上等距设置若干个圆形通孔三。
28.所述距离传感器模块一设置于圆形通孔三内。
29.所述质量检测机构包括电动升降装置一、压力传感器模块、固定基板、检测杆和电磁铁一。
30.所述电动升降装置一通过安装架设置于长方体中空容器一内,且电动升降装置一位于圆形通孔二下方。
31.所述固定基板通过压力传感器模块设置于电动升降装置一的活动端。
32.所述检测杆呈“t”形;检测杆通过环状安装架设置于固定基板上;检测杆与圆形通孔二滑动连接。
33.所述检测杆上设置安装凹槽一。
34.所述电磁铁一设置于安装凹槽一内。
35.所述传送部分包括合格品传送机构和缺陷品传送机构。
36.所述合格品传送机构包括辊轴一、安装侧板、防护侧板和伺服电机一。
37.所述安装侧板和防护侧板平行设置于长方体中空容器二上底板上,且安装侧板上等距设置若干个圆形销孔;防护侧板位于安装侧板的外侧。
38.所述辊轴一销轴连接于圆形销孔内。
39.所述伺服电机一设置于长方体中空容器二内,且伺服电机一与辊轴一之间传动连接。
40.所述缺陷品传送机构包括传送轨道、推杆电机二、“l”形连接轨道。
41.所述传送轨道的一端设置于“l”形支柱一。
42.所述传送轨道另一端设置于“l”形支柱二。
43.所述推杆电机二通过安装架设置于“l”形支柱一上。
44.所述“l”形连接轨道设置于推杆电机二的活动端上;且“l”形连接轨道高于传送轨道。
45.所述暂存部分包括合格品暂存机构和缺陷品暂存机构。
46.所述合格品暂存机构包括电动升降装置二、辊轴二、“n”形支撑板、“u”形管和滚轮。
47.所述电动升降装置二设置于长方体中空容器一上底板上,且电动升降装置二位于长方体中空容器二右侧。
48.所述辊轴二通过支柱等距销轴连接于电动升降装置二活动端上。
49.所述“n”形支撑板设置于长方体中空容器一上底板上,且“n”形支撑板位于电动升降装置二上方。
50.所述“u”形管设置于“n”形支撑板上。
51.所述滚轮等距销轴连接于“u”形管内。
52.所述缺陷品暂存机构包括电动升降装置三、缓存垫和暂存框。
53.所述电动升降装置三设置于长方体中空容器一上底板上,且电动升降装置三位于电动升降装置二右侧。
54.所述电动升降装置三活动端设置四个定位块。
55.所述缓存垫设置于电动升降装置三的活动端上。
56.所述暂存框由方形底框和侧边栏柱构成;暂存框插接于定位块上。
57.所述活动盘部分包括活动底板和承载板。
58.所述承载板平行设置于活动底板上,承载板上等距设置若干个“u”形开口通槽二。
59.所述智能控制部分包括控制机构、反馈机构和预警机构。
60.所述控制机构包括启动按钮、暂停按钮和微处理器。
61.所述启动按钮和暂停按钮设置于长方体中空容器一上底板。
62.所述微处理器设置于长方体中空容器一内。
63.所述反馈机构包括光电计数传感器模块、距离传感器模块二和距离传感器模块三。
64.所述光电计数传感器模块设置于传送轨道侧壁上。
65.所述距离传感器模块二设置于检测杆上。
66.所述距离传感器模块三设置于“n”形支撑板侧壁上。
67.所述预警机构包括蜂鸣器和可变色发光二极管。
68.所述蜂鸣器和可变色发光二极管设置于“l”形支柱二上。
69.所述推杆电机一、距离传感器模块一、电动升降装置一、压力传感器模块、电磁铁一、伺服电机一、推杆电机二、电动升降装置二、电动升降装置三、蜂鸣器、可变色发光二极管、光电计数传感器模块、距离传感器模块二、距离传感器模块三、启动按钮、暂停按钮和微处理器之间电性连接。
70.进一步,增设双动子丝杆电机和驱动块于一支撑侧板上,支撑侧板设置于长方体中空容器一上底板上,且支撑板位于电动升降装置三左侧,驱动块设置于双动子丝杆电机的动子上。且驱动块与活动盘部分相适配,双动子丝杆电机与微处理器电性连接。
71.相对于现有技术的有益效果:
72.本实用新型中,通过主体框架、输入部分、检测部分、传送部分、暂存部分、活动盘部分、智能控制部分的一体化设置,实现了对组装后的辊轴进行自动化转移并检测,优化了生产流程,降低了劳动强度,不对辊轴组装区的生产造成影响,生产效率得到显著提升,同时可减少安全隐患。
附图说明
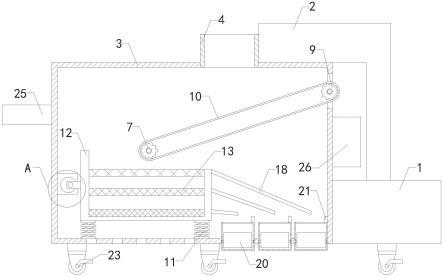
73.图1为本实用新型工作状态下俯视结构示意图;
74.图2为本实用新型正视局部剖面结构示意图。
75.图中:101. 长方体中空容器一、102. 长方体中空容器二、103. 定位柱、104. 承接柱、105.
ꢀ“
l”形支柱一、106.
ꢀ“
l”形支柱二、201. 辅助杆一、202. 滑轨一、203. 定位卡块、204.
ꢀ“
u”形固定柱、301. 括推杆电机一、302. 检测盒、303. 圆形通孔三、304. 电动升降装置一、305. 固定基板、306. 检测杆、401. 辊轴一、402. 安装侧板、403. 防护侧板、404. 传送轨道、405. 推杆电机二、406.
ꢀ“
l”形连接轨道、501. 电动升降装置二、502. 辊轴二、503.
ꢀ“
u”形管、504. 滚轮、505. 电动升降装置三、506. 缓存垫、507. 暂存框、601. 承载板、602. 活动底板、701. 辊轴柱加工装置。
具体实施方式
76.实施例1,参照附图1-2,一种适用于磨边机辊轴的质检传送装置,包括主体框架、输入部分、检测部分、传送部分、暂存部分、活动盘部分、智能控制部分。
77.所述主体框架包括基座、承重座、定位柱103、承接柱104、“l”形支柱一105和“l”形支柱二106。
78.所述基座包括长方体中空容器一101。
79.所述长方体中空容器一101上底板上设置两个圆形通孔一和两个圆形通孔二;圆形通孔二位于圆形通孔一的内侧。
80.所述承重座包括长方体中空容器二102,所述长方体中空容器二102设置于长方体中空容器一101上底板上。
81.所述长方体中空容器二102上底板上等距设置若干个长方形通孔二。
82.所述定位柱103设置于长方体中空容器一101上底板上,且定位柱103位于长方体中空容器二102的前侧和后侧。
83.所述承接柱104设置于长方体中空容器一101上底板上,且承接柱104位于长方体中空容器二102的左侧。
84.所述承接柱104的上端设置“u”形开口通槽一。
85.所述“l”形支柱一105和“l”形支柱二106均设置于长方体中空容器一101上底板上;“l”形支柱一105和“l”形支柱二106呈矩形分布;“l”形支柱一105高于“l”形支柱二106。
86.所述输入部分包括滑轨一202、辅助杆一201、定位卡块203和“u”形固定柱204。
87.所述辅助杆一201的一端销轴连接于定位柱103上。
88.所述定位卡块203设置于辅助杆一201上,且辅助杆一201与“u”形开口通槽一相适配。
89.所述滑轨一202设置于辅助杆一201上;且滑轨一202长于辅助杆一201。
90.所述“u”形固定柱204的两端分别设置于两个辅助杆一201上。
91.所述检测部分包括尺寸检测机构和质量检测机构。
92.所述尺寸检测机构包括推杆电机一301和检测盒302。
93.所述推杆电机一301通过安装架设置于长方体中空容器一101内。
94.所述检测盒302通过连接柱设置于推杆电机一的活动端,且检测盒302位于圆形通
孔一的上方,连接柱滑动连接于圆形通孔一内。
95.所述检测盒302包括长方体中空容器三和距离传感器模块一。
96.所述长方体中空容器三靠近长方体中空容器二102的侧板上等距设置若干个圆形通孔三303。
97.所述距离传感器模块一设置于圆形通孔三303内。
98.所述质量检测机构包括电动升降装置一304、压力传感器模块、固定基板305、检测杆306和电磁铁一。
99.所述电动升降装置一304通过安装架设置于长方体中空容器一101内,且电动升降装置一304位于圆形通孔二下方。
100.所述固定基板305通过压力传感器模块设置于电动升降装置一304的活动端。
101.所述检测杆306呈“t”形;检测杆306通过环状安装架设置于固定基板305上;检测杆306与圆形通孔二滑动连接。
102.所述检测杆306上设置安装凹槽一。
103.所述电磁铁一设置于安装凹槽一内。
104.所述传送部分包括合格品传送机构和缺陷品传送机构。
105.所述合格品传送机构包括辊轴一401、安装侧板402、防护侧板403和伺服电机一。
106.所述安装侧板402和防护侧板403平行设置于长方体中空容器二102上底板上,且安装侧板402上等距设置若干个圆形销孔;防护侧板403位于安装侧板402的外侧。
107.所述辊轴一401销轴连接于圆形销孔内。
108.所述伺服电机一设置于长方体中空容器二102内,且伺服电机一与辊轴一401之间传动连接。
109.所述缺陷品传送机构包括传送轨道404、推杆电机二405、“l”形连接轨道406。
110.所述传送轨道404一端设置于“l”形支柱一105。
111.所述传送轨道404另一端设置于“l”形支柱二106。
112.所述推杆电机二405通过安装架设置于“l”形支柱一105上。
113.所述“l”形连接轨道406设置于推杆电机二405的活动端上;且“l”形连接轨道406高于传送轨道404。
114.所述暂存部分包括合格品暂存机构和缺陷品暂存机构。
115.所述合格品暂存机构包括电动升降装置二501、辊轴二502、“n”形支撑板、“u”形管503和滚轮504。
116.所述电动升降装置二501设置于长方体中空容器一101上底板上,且电动升降装置二501位于长方体中空容器二102右侧。
117.所述辊轴二502通过支柱等距销轴连接于电动升降装置二501活动端上。
118.所述“n”形支撑板设置于长方体中空容器一101上底板上,且“n”形支撑板位于电动升降装置二501上方。
119.所述“u”形管503设置于“n”形支撑板上。
120.所述滚轮504等距销轴连接于“u”形管503内。
121.所述缺陷品暂存机构包括电动升降装置三505、缓存垫506和暂存框507。
122.所述电动升降装置三505设置于长方体中空容器一101上底板上,且电动升降装置
三505位于电动升降装置二501右侧。
123.所述电动升降装置三505活动端设置四个定位块。
124.所述缓存垫506设置于电动升降装置三505的活动端上。
125.所述暂存框507由方形底框和侧边栏柱构成;暂存框507插接于定位块上。
126.所述活动盘部分包括活动底板602和承载板601。
127.所述承载板601平行设置于活动底板602上,承载板601上等距设置若干个“u”形开口通槽二。
128.所述智能控制部分包括控制机构、反馈机构和预警机构。
129.所述控制机构包括启动按钮、暂停按钮和微处理器。
130.所述启动按钮和暂停按钮设置于长方体中空容器一101上底板。
131.所述微处理器设置于长方体中空容器一101内。
132.所述反馈机构包括光电计数传感器模块、距离传感器模块二和距离传感器模块三。
133.所述光电计数传感器模块设置于传送轨道404侧壁上。
134.所述距离传感器模块二设置于检测杆306上。
135.所述距离传感器模块三设置于“n”形支撑板侧壁上。
136.所述预警机构包括蜂鸣器和可变色发光二极管。
137.所述蜂鸣器和可变色发光二极管设置于“l”形支柱二106上。
138.所述推杆电机一301、距离传感器模块一、电动升降装置一304、压力传感器模块、电磁铁一、伺服电机一、推杆电机二405、电动升降装置二501、电动升降装置三505、蜂鸣器、可变色发光二极管、光电计数传感器模块、距离传感器模块二、距离传感器模块三、启动按钮、暂停按钮和微处理器之间电性连接。
139.工作原理及使用方法:
140.第一步,预设置:
141.对本实用新型装置进行供电调试。
142.将滑轨一202和“u”形固定柱204安装到辊轴柱加工装置701(或其他磨边机辊轴加工设备)上。
143.将活动盘部分放置于辊轴一上。
144.第二步,上件:
145.将磨边机辊轴放置到滑轨一202上。磨边机辊轴沿着滑轨滑至检测杆306上,距离传感器模块二将采集到的信号输出给微处理器,微处理器输出信号给电磁铁一和推杆电机一,电磁铁一启动,将磨边机辊轴的位置进行修正,推杆电机一带动检测盒302上移。
146.距离传感器模块一和压力传感器模块将采集到的信号输出给微处理器。微处理器结合信息进行判定。
147.情况一:磨边机辊轴达标(即:质量和长度均符合预设值),微处理器输出信号给伺服电机一和电动升降装置一304。电动升降装置一304带动检测杆306下移,磨边机辊轴进入承载板601的“u”形开口通槽二内。伺服电机一启动,使得活动盘部分前移一个单位距离。之后检测杆306复位。
148.情况二:磨边机辊轴不达标(即:质量或长度不符合预设值),微处理器输出信号给
推杆电机二405和电动升降装置一304。电动升降装置一304带动检测杆306上移,磨边机辊轴位于“l”形连接轨道406上方,之后,推杆电机二405带动“l”形连接轨道406前移,使得磨边机辊轴进入传送轨道404。接着,电动升降装置一304和推杆电机二405依次复位。
149.第三步,暂存:
150.情况一中,当活动盘部分满载时,微处理器输出信号给电动升降装置一304、电动升降装置二501、伺服电机一、蜂鸣器和可变色发光二极管。伺服电机一通过辊轴一401,将活动盘部分运载至电动升降装置二501上方,之后,电动升降装置二501下移,可变色发光二极管显示红色,蜂鸣器短鸣,提醒操作人员进行卸载。操作人员通过滚轮504牵引活动盘部分,使得活动盘部分运行至“n”形支撑板一侧进行卸载。
151.情况二中,当磨边机辊轴进入暂存框507,数量达到预设数目时,光电计数传感器模块将采集到的信号输出给微处理器,微处理器输出信号给电动升降装置三505、蜂鸣器和可变色发光二极管,蜂鸣器长鸣,可变色发光二极管显示红色,电动升降装置三505下移,方便操作人员进行卸载。
152.第四步,预警:
153.当电磁铁一起动5秒后,检测杆306两端的距离传感器模块二检测到数值超出误差范围时,微处理器输出信号给可变色发光二极管和蜂鸣器。可变色发光二极管显示红色并闪烁,蜂鸣器间歇性长鸣,提醒操作人员进行检修或维护。
154.实施例2,在实施例1的基础上,增设双动子丝杆电机和驱动块于一支撑侧板上,支撑侧板设置于长方体中空容器一101上底板上,且支撑板位于电动升降装置三505左侧,驱动块设置于双动子丝杆电机的动子上。且驱动块与活动盘部分相适配,双动子丝杆电机与微处理器电性连接。实现对电动升降装置二501上的活动盘部分的位置控制,降低操作强度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。