1.本技术涉及自动化设备的技术领域,尤其是涉及一种点胶机。
背景技术:
2.点胶机主要是将流体点滴、涂覆于产品表面或产品内部的自动化机器,可实现三维、四维路径点胶,点胶机具有精确定位、精准控胶、不拉丝、不漏胶、不滴胶的优点。
3.目前的点胶机点胶完毕后,需要暂停点胶将放料板从承托板上移走,以便点胶后工件的取出,然后等装好工件的放料板安装于承托板上后再继续进行点胶作业。针对上述中的相关技术,发明人认为存在有点胶过程不连续、上料等待时间较长的缺陷。
技术实现要素:
4.为了减少点胶过程的上料等待时间,本技术提供一种点胶机。
5.本技术提供的一种点胶机采用如下的技术方案:
6.一种点胶机,包括操作台、夹持组件、夹持驱动组件、点胶组件和点胶驱动组件,所述夹持组件、夹持驱动组件和点胶驱动组件连接于所述操作台上,所述夹持驱动组件用于驱动所述夹持组件,所述点胶驱动组件用于驱动所述点胶组件,所述夹持组件和夹持驱动组件有两个,并且两个所述夹持组件与操作台的距离不等,且两个所述夹持组件可进行水平方向的相对移动,所述点胶驱动组件包括水平驱动组件和竖直驱动组件。
7.通过采用上述技术方案,设置两个高低错落且可以相对水平移动的夹持组件,可以一个夹持组件夹持工件进行点胶的同时,另一个夹持组件进行上料,点胶完毕后,两个夹持组件通过水平方向的移动进行位置互换,然后继续进行点胶,同时将点好了胶的工件取下,重新换上新的工件,如此循环交替,可以保证点胶件持续不间断的点胶,从而减少工件上料的等待时间。
8.可选的,所述夹持组件包括承托板,所述夹持驱动组件包括与所述承托板相连接的气缸。
9.通过采用上述技术方案,气缸与承托板相连接,驱动承托板在操作台上沿水平方向的运动,气缸可以往复做直线运动,实现两个承托板的来回移动,位置互换交替点胶作业,气缸结构简单,还可以节约成本。
10.可选的,所述水平驱动组件包括第一摆臂、第二摆臂、用于驱动第一摆臂的第一驱动件和用于驱动第二摆臂的第二驱动件,所述第一摆臂一端通过底座连接于所述操作台上,所述第一驱动件设于所述底座内,所述第一摆臂的另一端与所述第二摆臂相连接,所述第二摆臂的另一端与点胶组件相连接。
11.通过采用上述技术方案,通过第一摆臂和第二摆臂将点胶组件连接于操作台上,并且通过第一驱动件和第二驱动件驱动第一摆臂和第二摆臂运动,带动点胶组件在水平方向进行运动,从而实现点胶组件在水平方向的任意位置变化,提高点胶组件的水平方向位置改变的灵活性。
12.可选的,所述竖直驱动组件包括连接杆和供连接杆竖直方向移动的竖向驱动件,所述第二摆臂通过连接杆与所述点胶组件相连接。
13.通过采用上述技术方案,连接杆与竖向驱动件相连接,竖向驱动件驱动连接杆在竖直方向运动,连接杆又与点胶组件相连接,即通过竖向驱动件带动点胶组件在竖直方向的运动,通过水平驱动组件和竖直驱动组件,可以实现点胶组件的水平和竖直方向的运动,从而实现点胶组件任意方向的位置变化。
14.可选的,所述点胶组件包括点胶件和固定件,所述连接杆靠近操作台一端与固定件相连接,所述固定件上设有调节槽,所述点胶件通过所述调节槽与所述固定件相连接。
15.通过采用上述技术方案,点胶件通过调节槽连接于固定件上,并通过固定件与连接杆相连接,通过调节槽可以调节点胶件与固定件的相对位置,调节完毕后再对调节槽和固定件进行相对固定,即可实现点胶件与固定件的相对位置改变,可以在点胶件与固定件连接的同时进行灌注胶水,从而提高灌注胶水的便捷性。
16.可选的,所述固定件设有与所述调节槽相适配的弧形槽壁,所述点胶件设有与所述弧形槽壁相适配的挡边。
17.通过采用上述技术方案,设置弧形槽壁以及挡边,可以在点胶件与调节槽连接的同时,将挡边与弧形槽壁相配合,可以提高点胶件和固定件连接的紧密性,并且通过挡边的设置,可以对点胶件起到承托作用,可以减少调节槽的受力,提高调节槽的稳定性。
18.可选的,所述操作台上连接有刮胶件,所述刮胶件包括具有流动腔的刮胶部和与所述流动腔相连通的储胶部。
19.通过采用上述技术方案,点胶件的胶头部分多余的胶水通过刮胶部的边缘进行刮除,使得多余的胶水流入流动腔内,然后通过流动腔与储胶部相连通,使胶水流入储胶部进行储存,通过刮胶件的设置,可以减少点胶件的胶头部分多余胶水对点胶造成影响。
20.可选的,所述操作台上还连接有校正组件,所述校正组件包括连接座和设于底座上的力传感器,所述力传感器有三个并且分别位于x、y、z三个平面。
21.通过采用上述技术方案,因为点胶件与固定件通过调节槽相连接,所以点胶件在使用一段时间后,胶头的位置会发生改变,通过校正组件,将点胶件的胶头放于力传感器上,通过力传感器的感应来对胶头进行校正,可以提高点胶件胶头位置的一致性,从而提高点胶的准确性。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.设置两个高低错落且可以相对水平移动的夹持组件,可以一个夹持组件夹持工件进行点胶的同时,另一个夹持组件进行上料,可以保证点胶件持续不间断的点胶,从而减少工件上料的等待时间;
24.通过水平驱动组件和竖直驱动组件,可以实现点胶组件的水平和竖直方向的运动,从而实现点胶组件任意方向的位置变化;
25.设置调节槽可以在点胶件与固定件连接的同时进行灌注胶水,从而提高灌注胶水的便捷性。
附图说明
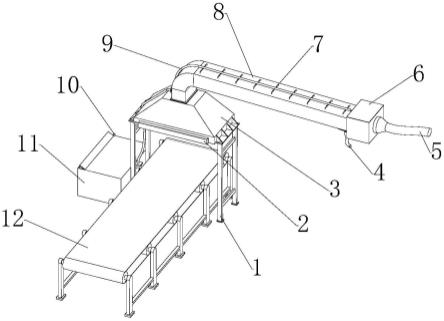
26.图1是本技术实施例的整体结构示意图;
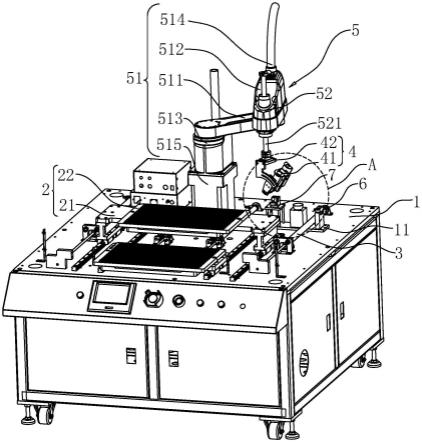
27.图2是本技术实施例的部分结构示意图;
28.图3是图2中a部分的放大示意图。
29.附图标记说明:1、操作台;11、连接板;2、夹持组件;21、承托件;22、放料件;3、夹持驱动组件;4、点胶组件;41、点胶件;411、挡边;42、固定件;421、固定部;422、连接部;423、调节槽;5、点胶驱动组件;51、水平驱动组件;511、第一摆臂;512、第二摆臂;513、第一驱动件;514、第二驱动件;515、底座;52、竖直驱动组件;521、连接杆;6、刮胶件;61、刮胶部;62、储胶部;7、校正组件;71、连接座;72、力传感器。
具体实施方式
30.以下结合附图对本技术作进一步详细说明。
31.本技术实施例公开一种点胶机。参照图1和图2,一种点胶机包括操作台1、夹持组件2、夹持驱动组件3、点胶组件4和点胶驱动组件5,操作台1上连接有用于夹持工件的夹持组件2、用于驱动夹持组件2运动的夹持驱动组件3、用于驱动点胶组件4运动的点胶驱动组件5、用于校正点胶组件4的校正组件7和刮除多余胶水的刮胶件6。
32.参照图2,夹持组件2有两个,并且两个夹持组件2距离操作台1的距离不相等,一高一低,两个夹持组件2通过夹持驱动组件3实现水平方向的相对运动,一个夹持组件2可穿梭于另一个夹持组件2与操作台1的连接空隙,实现位置互换。夹持组件2包括承托件21和与承托件21可拆卸连接的放料件22,承托件21两端设有两个竖向连接柱,放料件22两端设有与连接柱相配合的连接槽,连接槽套设于连接柱上,实现放料件22和承托件21的可拆卸连接,具体的,在本实施例中,放料件22为放料板、承托件21为承托板。
33.参照图2,夹持驱动组件3包括气缸,具体的,在本实施例中,气缸有四个,每两个气缸连接于一个承托板的两侧边,并且四个气缸沿承托板侧边平行设置。
34.参照图2,点胶驱动组件5包括水平驱动组件51和竖直驱动组件52,水平驱动组件51包括第一摆臂511、第二摆臂512、第一驱动件513、第二驱动件514和底座515,第一驱动件513用于驱动第一摆臂511,第二驱动件514用于驱动第二摆臂512,底座515垂直连接于操作台1上,第一驱动件513设置于底座515内,第一摆臂511一端通过第一驱动件513与底座515相连接,第一摆臂511的另一端通过第二驱动件514与第二摆臂512相连接,第二摆臂512的另一端通过竖直驱动组件52与点胶组件4相连接,具体的,在本实施例中,第一驱动件513和第二驱动件514均为电机。
35.参照图2,竖直驱动组件52包括连接杆521和与连接杆521相连接的竖向驱动件,具体的,竖向驱动件设于第二摆臂512内,连接杆521穿设于第二摆臂512,并通过竖向驱动件与第二摆臂512进行沿竖直方向的相对运动,具体的,在本实施例中,竖向驱动件为电机。
36.参照图2和图3,点胶组件4包括点胶件41和固定件42,固定件42包括固定部421和连接部422,固定部421为水平方向设置的方形板,固定件42的固定部421与第一摆臂511垂直连接,连接部422垂直连接于固定部421的一侧边,点胶件41固定连接于固定件42的连接部422。连接部422上设有位于竖直平面内的调节槽423,在本实施例中,调节槽423呈弧形,点胶件41点胶时,点胶件41和调节槽423通过螺栓实现相对固定,点胶件41也可以通过在调节槽423内滑移实现角度的调节,调节槽423周围有与弧形调节槽423相适配的弧形槽壁,点胶件41还设有具有一定宽度的挡边411,挡边411与弧形槽壁相接触。具体的,点胶件41为针
筒。
37.参照图2和图3,操作台1上连接有连接板11,连接板11上水平连接有刮胶件6和校正组件7,刮胶件6包括刮胶部61和储胶部62,刮胶部61内设有流动腔,储胶部62与流动腔相连通,用于存储点胶件41上多余的胶水,具体的,刮胶部61大体呈t状,有利于胶水从流动腔流入储胶部62,储胶部62外部呈长方体状,在本实施例中,点胶件41每点完一组放料件22上的工件就进行一次刮胶。
38.参照图2和图3,校正组件7包括连接座71和三个力传感器72,连接座71竖直连接于连接板11上,连接座71上设有两块相互垂直的挡板,三个力传感器72连接于两块挡板和底座515设有挡板的表面上,即力传感器72的传感面分别朝向x、y、z三个平面,具体的,力传感器72的表面呈圆形,且校正组件7设于靠近点胶驱动组件5一侧,在本实施例中,在点胶过程中,点胶件41每隔半小时进行一次校正。
39.本技术实施例一种点胶机的实施原理为:将工件放置于放料件22上,再把装有工件的放料件22连接于承托板上,通过点胶驱动组件5驱动第一摆臂511和第二摆臂512运动,第一摆臂511和第二摆臂512带动点胶组件4进行点胶作业,在放料件22进行点胶时,将工件放置于另一个放料件22上,然后再把刚放置工件的放料件22放置于另一承托件21上,正在点胶的放料件22上的工件点胶完毕后,通过四个气缸对两个承托件21的驱动,将一个承托件21穿过另一个承托件21进行双向水平移动换位,两个承托件21换位时,点胶件41进行刮胶,换位完成后,点胶件41进行进行点胶作业,两个承托件21和放料件22交替点胶、上料,如此循环往复,可以满足点胶件41不间断的点胶作业,从而减少点胶过程的上料等待时间。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。