1.本发明涉及无线电定向技术领域,具体涉及基于毫米波雷达的智能工业机器人及其方法。
背景技术:
2.毫米波雷达,是工作在毫米波波段探测的雷达。通常毫米波是指30~300ghz频域的电磁波。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好。光波在大气中传播衰减严重,器件加工精度要求高。毫米波与光波相比,它们利用大气窗口(毫米波与亚毫米波在大气中传播时,由于气体分子谐振吸收所致的某些衰减为极小值的频率)传播时的衰减小,受自然光和热辐射源影响小。为此,它们在通信、雷达、制导、遥感技术、射电天文学和波谱学方面都有重大的意义。利用大气窗口的毫米波频率可实现大容量的卫星-地面通信或地面中继通信。利用毫米波天线的窄波束和低旁瓣性能可实现低仰角精密跟踪雷达和成像雷达。高分辨率的毫米波辐射计适用于气象参数的遥感。用毫米波和亚毫米波的射电天文望远镜探测宇宙空间的辐射波谱可以推断星际物质的成分。
3.公开号为cn110596648a的中国发明专利公开了一种车载毫米波雷达,所述车载毫米波雷达至少包括由天线罩和壳体构成的腔体结构;其中,所述壳体内壁设有用于与所述腔体结构外部导通的的管状的安装凸台,所述安装凸台端部设有上沉孔,所述上沉孔设置有透气膜。通过本发明装置中下屏蔽盖、透气膜和壳体的结构设计,解决了传统雷达装置塑料散热不良的问题,提高了雷达天线性能。
4.公开号为cn109305097a的中国发明专利公开了一种清扫车夜间防追尾预警装置。该装置的机盒向内表面设有固定连接器,用于与清扫车后车体连接;与之相对的外表面固定led指示牌、定向扬声器和毫米波雷达,定向扬声器和毫米波雷达分别与外表面垂直,毫米波雷达获得后方目标车辆的运动信息;机盒上表面固定光敏传感器;光敏传感器获取外部光照强度信息;霍尔传感器和角速度传感器固定在机盒侧面,角速度传感器作用于弯道时的角度测量,霍尔传感器则用来测量汽车自身的行驶速度;机盒内部固定单片机中央处理器和电源。本发明在夜间可有效监测后方车辆与自身车辆距离信息,判定后方车辆追尾概率,主动进行提醒。
5.但是上述专利仍存在以下问题:在现有工业生产中,对工业区域产生的杂物易造成生产通道堵塞,清扫工作多为人为清理,工作效率低,安全风险高。
技术实现要素:
6.本发明针对现有技术存在的上述问题,提供了基于毫米波雷达的智能工业机器人。
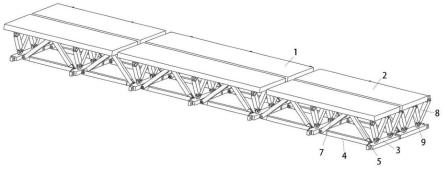
7.本发明的基本方案为:基于毫米波雷达的智能工业机器人,包括红外部、清捞部、装运部、喷洗部和雷达部,所述清捞部置于装运部的前端,所述喷洗部置于装运部的底部,所述雷达部置于清捞部的前端,所述清捞部包括漏框、清捞流道、清捞支架、清捞驱动、清捞转轴、清捞支杆和清扫板,所述清捞流道的顶部置于漏框的一端,所述清捞支架置于清捞流道的顶部,所述清捞驱动置于清捞支架的一端,所述清捞转轴与清捞驱动转动连接,所述清捞支杆置于清捞转轴的两侧,所述清扫板置于清捞支杆的一端。
8.优选地,所述毫米波雷达块包括功率放大器、频率放大器、中央处理器、噪声放大器和混频器,所述中央处理器与频率放大器传输信号,所述频率放大器向功率放大器传输信号,所述噪声放大器经混频器向中央处理器输送信号。
9.优选地,所述雷达部内部设有信号控制块,所述信号控制块包括毫米波雷达块、数据处理块、车速控制块、清捞控制块、喷洗控制块和红外探测块,所述红外探测块与毫米波雷达块向数据处理块传输信号,所述数据处理块分别向车速控制块、清捞控制块和喷洗控制块传输信号,所述红外探测块控制红外部,所述清捞控制块控制清捞部,所述喷洗控制块控制喷洗部。
10.优选地,所述喷洗部包括多个盘刷架、盘刷支杆、喷洗架、输水管、多个盘刷和刮板,所述盘刷架与喷洗架分别与盘刷支杆两端铰接,所述盘刷与盘刷架转动连接,所述输水管分别与多个盘刷中部连通,所述刮板与喷洗架铰接。
11.优选地,所述装运部包括装运隔板、水仓、隔板滑杆和装运触块,所述装运隔板置于水仓顶部,所属隔板滑杆置于水仓的内壁一侧,所述装运触块置于水仓的底部,所述装运隔板与隔板滑杆滑动连接。
12.优选的,还包括车体部,所述车体部包括车架、多个行轮、转向轴、转向齿轮、转向架和两个前轮轴,所述转向轴置于车架的前端,所述转向齿轮置于转向轴的一端,所述转向架顶部和转向齿轮啮合,两个所述前轮轴对称置于转向架的两侧,多个所述行轮分别与两个前轮轴转动连接。
13.优选的,所述车体部还包括后轮轴、驱动齿轮和从动齿轮,所述驱动齿轮置于车体部的后端,所述从动齿轮置于后轮轴的中部,所述驱动齿轮与从动齿轮啮合,多个所述行轮对称置于后轮轴两侧。
14.优选的,所述红外部置于车架的后端。
15.优选的,还包括太阳能部,所述太阳能部包括太阳能架和太阳能板,所述太阳能架与车架铰接,所述太阳能板置于太阳能架上。
16.本发明还公开了基于毫米波雷达的智能工业机器人的使用方法:s1.在该工业机器人运行过程中,毫米波雷达的中央处理器发出信号,并将雷达信号经频率放大器和功率放大器进行放大后经雷达收发器送出,雷达波信号在遇到障碍或杂物后反弹回雷达收发器,并经噪声放大器和混频器处理后送至中央处理器进行处理,作出操作指令;s2.杂物的位置信号被毫米波雷达块探测到后,将信号传递至数据处理块,数据处
理块向车速控制块发出指令,控制驱动齿轮转动速度,对该工业机器人减速,并控制转向轴转动,转向齿轮带动转向架转向,将该工业机器人移动至杂物处;s3.数据处理块向清捞控制块发出指令,控制清捞驱动带动清捞转轴转动,清捞支杆带动清扫板将杂物捞起,经清捞流道送入漏框内;s4.数据处理块向喷洗控制块发出指令,控制盘刷支杆下方盘刷和刮板,对地面进行水冲洗;s5.该工业机器人经过冲洗后的区域,经红外部探测,红外探测块将信号传至数据处理块,辨别清理效果。
17.本发明的工作原理及优点在于:本发明包括红外部、清捞部、装运部、喷洗部和雷达部,雷达部对障碍物或杂物进行分辨,并控制清捞部对杂物进行清理,并捞起至装运部内收集,随后控制喷洗部对杂物防止区域进行喷洒冲洗,结束后通过红外部进行检查反馈,提高了该工业机器人工作协调性和清杂有效性,提高了毫米波雷达利用的充分性。数据处理块向清捞控制块发出指令,控制清捞驱动带动清捞转轴转动,清捞支杆带动清扫板将杂物捞起,经清捞流道送入漏框内。
18.杂物的位置信号被毫米波雷达块探测到后,将信号传递至数据处理块,数据处理块向车速控制块发出指令,控制驱动齿轮转动速度,对该工业机器人减速,并控制转向轴转动,转向齿轮带动转向架转向,将该工业机器人移动至杂物处;红外部置于车架的后端。该工业机器人经过冲洗后的区域,经红外部探测,红外探测块将信号传至数据处理块,辨别清理效果。在该工业机器人运行过程中,毫米波雷达的中央处理器发出信号,并将雷达信号经频率放大器和功率放大器进行放大后经雷达收发器送出,雷达波信号在遇到障碍或杂物后反弹回雷达收发器,并经噪声放大器和混频器处理后送至中央处理器进行处理,作出操作指令。数据处理块向喷洗控制块发出指令,控制盘刷支杆下方盘刷和刮板,对地面进行水冲洗。装运隔板受杂物重力下压后,随着水仓内水的使用,沿隔板滑杆下滑,直至装运隔板下压至装运触块上,清捞部停止工作,该工业机器人前往指定区域卸货。
附图说明
19.图1为本发明基于毫米波雷达的智能工业机器人的结构示意图;图2为本发明基于毫米波雷达的智能工业机器人中车体部的结构示意图;图3为本发明基于毫米波雷达的智能工业机器人的剖视图;图4为图3中a部位的局部放大图;图5为本发明基于毫米波雷达的智能工业机器人中清捞部的结构示意图;图6为本发明基于毫米波雷达的智能工业机器人中信号控制块的流程图;图7为本发明基于毫米波雷达的智能工业机器人中毫米波雷达块的流程图。
具体实施方式
20.下面通过具体实施方式进一步详细的说明:实施例一:毫米波雷达,是工作在毫米波波段探测的雷达。通常毫米波是指30~300ghz频域
的电磁波。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好。光波在大气中传播衰减严重,器件加工精度要求高。毫米波与光波相比,它们利用大气窗口(毫米波与亚毫米波在大气中传播时,由于气体分子谐振吸收所致的某些衰减为极小值的频率)传播时的衰减小,受自然光和热辐射源影响小。为此,它们在通信、雷达、制导、遥感技术、射电天文学和波谱学方面都有重大的意义。
21.利用大气窗口的毫米波频率可实现大容量的卫星-地面通信或地面中继通信。利用毫米波天线的窄波束和低旁瓣性能可实现低仰角精密跟踪雷达和成像雷达。高分辨率的毫米波辐射计适用于气象参数的遥感。用毫米波和亚毫米波的射电天文望远镜探测宇宙空间的辐射波谱可以推断星际物质的成分。如图1-7所示,本发明提供了基于毫米波雷达的智能工业机器人,包括红外部3、清捞部4、装运部5、喷洗部6和雷达部7,清捞部4置于装运部5的前端,喷洗部6置于装运部5的底部,雷达部7置于清捞部4的前端,清捞部4包括漏框401、清捞流道402、清捞支架403、清捞驱动404、清捞转轴405、清捞支杆406和清扫板407,清捞流道402的顶部置于漏框401的一端,清捞支架403置于清捞流道402的顶部,清捞驱动404置于清捞支架403的一端,清捞转轴405与清捞驱动404转动连接,清捞支杆406置于清捞转轴405的两侧,清扫板407置于清捞支杆406的一端。
22.车体部1还包括后轮轴107、驱动齿轮108和从动齿轮109,驱动齿轮108置于车体部1的后端,从动齿轮109置于后轮轴107的中部,驱动齿轮108与从动齿轮109啮合,多个行轮102对称置于后轮轴107两侧。
23.雷达部7内部设有信号控制块,信号控制块包括毫米波雷达块、数据处理块、车速控制块、清捞控制块、喷洗控制块和红外探测块,红外探测块与毫米波雷达块向数据处理块传输信号,数据处理块分别向车速控制块、清捞控制块和喷洗控制块传输信号,红外探测块控制红外部3,清捞控制块控制清捞部4,喷洗控制块控制喷洗部6。
24.毫米波雷达块包括功率放大器、频率放大器、中央处理器、噪声放大器和混频器,中央处理器与频率放大器传输信号,频率放大器向功率放大器传输信号,噪声放大器经混频器向中央处理器输送信号。
25.本发明包括红外部3、清捞部4、装运部5、喷洗部6和雷达部7,雷达部7对障碍物或杂物进行分辨,并控制清捞部4对杂物进行清理,并捞起至装运部5内收集,随后控制喷洗部6对杂物防止区域进行喷洒冲洗,结束后通过红外部3进行检查反馈,提高了该工业机器人工作协调性和清杂有效性,提高了毫米波雷达利用的充分性。数据处理块向清捞控制块发出指令,控制清捞驱动404带动清捞转轴405转动,清捞支杆406带动清扫板407将杂物捞起,经清捞流道402送入漏框401内,部分杂物带有积水,可经漏框401将水漏至水仓内重复利用。
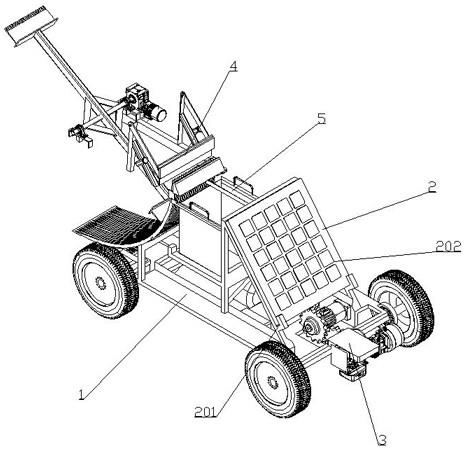
26.本发明还包括车体部1,车体部1包括车架101、多个行轮102、转向轴103、转向齿轮104、转向架105和两个前轮轴106,转向轴103置于车架101的前端,转向齿轮104置于转向轴103的一端,转向架105顶部和转向齿轮104啮合,两个前轮轴106对称置于转向架105的两侧,多个行轮102分别与两个前轮轴106转动连接。
27.杂物的位置信号被毫米波雷达块探测到后,将信号传递至数据处理块,数据处理块向车速控制块发出指令,控制驱动齿轮108转动速度,对该工业机器人减速,并控制转向轴103转动,转向齿轮104带动转向架105转向,将该工业机器人移动至杂物处;红外部3置于车架101的后端。该工业机器人经过冲洗后的区域,经红外部3探测,红外探测块将信号传至数据处理块,辨别清理效果。
28.实施例二:毫米波雷达,是工作在毫米波波段探测的雷达。通常毫米波是指30~300ghz频域的电磁波。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。与红外、激光、电视等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好。光波在大气中传播衰减严重,器件加工精度要求高。毫米波与光波相比,它们利用大气窗口(毫米波与亚毫米波在大气中传播时,由于气体分子谐振吸收所致的某些衰减为极小值的频率)传播时的衰减小,受自然光和热辐射源影响小。为此,它们在通信、雷达、制导、遥感技术、射电天文学和波谱学方面都有重大的意义。
29.利用大气窗口的毫米波频率可实现大容量的卫星-地面通信或地面中继通信。利用毫米波天线的窄波束和低旁瓣性能可实现低仰角精密跟踪雷达和成像雷达。高分辨率的毫米波辐射计适用于气象参数的遥感。用毫米波和亚毫米波的射电天文望远镜探测宇宙空间的辐射波谱可以推断星际物质的成分。如图1-7所示,本发明提供了基于毫米波雷达的智能工业机器人,包括红外部3、清捞部4、装运部5、喷洗部6和雷达部7,清捞部4置于装运部5的前端,喷洗部6置于装运部5的底部,雷达部7置于清捞部4的前端,清捞部4包括漏框401、清捞流道402、清捞支架403、清捞驱动404、清捞转轴405、清捞支杆406和清扫板407,清捞流道402的顶部置于漏框401的一端,清捞支架403置于清捞流道402的顶部,清捞驱动404置于清捞支架403的一端,清捞转轴405与清捞驱动404转动连接,清捞支杆406置于清捞转轴405的两侧,清扫板407置于清捞支杆406的一端。
30.车体部1还包括后轮轴107、驱动齿轮108和从动齿轮109,驱动齿轮108置于车体部1的后端,从动齿轮109置于后轮轴107的中部,驱动齿轮108与从动齿轮109啮合,多个行轮102对称置于后轮轴107两侧。
31.雷达部7内部设有信号控制块,信号控制块包括毫米波雷达块、数据处理块、车速控制块、清捞控制块、喷洗控制块和红外探测块,红外探测块与毫米波雷达块向数据处理块传输信号,数据处理块分别向车速控制块、清捞控制块和喷洗控制块传输信号,红外探测块控制红外部3,清捞控制块控制清捞部4,喷洗控制块控制喷洗部6。
32.毫米波雷达块包括功率放大器、频率放大器、中央处理器、噪声放大器和混频器,中央处理器与频率放大器传输信号,频率放大器向功率放大器传输信号,噪声放大器经混频器向中央处理器输送信号。
33.本发明包括红外部3、清捞部4、装运部5、喷洗部6和雷达部7,雷达部7对障碍物或杂物进行分辨,并控制清捞部4对杂物进行清理,并捞起至装运部5内收集,随后控制喷洗部6对杂物防止区域进行喷洒冲洗,结束后通过红外部3进行检查反馈,提高了该工业机器人工作协调性和清杂有效性,提高了毫米波雷达利用的充分性。数据处理块向清捞控制块发
出指令,控制清捞驱动404带动清捞转轴405转动,清捞支杆406带动清扫板407将杂物捞起,经清捞流道402送入漏框401内。部分杂物带有积水,可经漏框401将水漏至水仓内重复利用。
34.本发明还包括车体部1,车体部1包括车架101、多个行轮102、转向轴103、转向齿轮104、转向架105和两个前轮轴106,转向轴103置于车架101的前端,转向齿轮104置于转向轴103的一端,转向架105顶部和转向齿轮104啮合,两个前轮轴106对称置于转向架105的两侧,多个行轮102分别与两个前轮轴106转动连接。
35.杂物的位置信号被毫米波雷达块探测到后,将信号传递至数据处理块,数据处理块向车速控制块发出指令,控制驱动齿轮108转动速度,对该工业机器人减速,并控制转向轴103转动,转向齿轮104带动转向架105转向,将该工业机器人移动至杂物处;红外部3置于车架101的后端。该工业机器人经过冲洗后的区域,经红外部3探测,红外探测块将信号传至数据处理块,辨别清理效果。
36.在该工业机器人运行过程中,毫米波雷达的中央处理器发出信号,并将雷达信号经频率放大器和功率放大器进行放大后经雷达收发器送出,雷达波信号在遇到障碍或杂物后反弹回雷达收发器,并经噪声放大器和混频器处理后送至中央处理器进行处理,作出操作指令;本发明还包括太阳能部2,太阳能部2包括太阳能架201和太阳能板202,太阳能架201与车架101铰接,太阳能板202置于太阳能架201上。太阳能架201可根据太阳角度调节倾斜角度,太阳能板202为该工业机器人提供电力。
37.装运隔板501受杂物重力下压后,随着水仓502内水的使用,沿隔板滑杆503下滑,直至装运隔板501下压至装运触块504上,清捞部4停止工作,该工业机器人前往指定区域卸货。
38.装运部5包括装运隔板501、水仓502、隔板滑杆503和装运触块504,装运隔板501置于水仓502顶部,所属隔板滑杆503置于水仓502的内壁一侧,装运触块504置于水仓502的底部,装运隔板501与隔板滑杆503滑动连接。
39.喷洗部6包括多个盘刷架601、盘刷支杆602、喷洗架603、输水管604、多个盘刷605和刮板606,盘刷架601与喷洗架603分别与盘刷支杆602盘刷支杆两端铰接,盘刷605与盘刷架601转动连接,输水管604分别与多个盘刷中部连通,刮板606与喷洗架603铰接。数据处理块向喷洗控制块发出指令,控制盘刷支杆602下方盘刷605和刮板606,对地面进行水冲洗。
40.本发明还公开了基于毫米波雷达的智能工业机器人的使用方法:s1.在该工业机器人运行过程中,毫米波雷达的中央处理器发出信号,并将雷达信号经频率放大器和功率放大器进行放大后经雷达收发器送出,雷达波信号在遇到障碍或杂物后反弹回雷达收发器,并经噪声放大器和混频器处理后送至中央处理器进行处理,作出操作指令;s2.杂物的位置信号被毫米波雷达块探测到后,将信号传递至数据处理块,数据处理块向车速控制块发出指令,控制驱动齿轮108转动速度,对该工业机器人减速,并控制转向轴103转动,转向齿轮104带动转向架105转向,将该工业机器人移动至杂物处。
41.s3.数据处理块向清捞控制块发出指令,控制清捞驱动404带动清捞转轴405转动,清捞支杆406带动清扫板407将杂物捞起,经清捞流道402送入漏框401内。
42.s4.数据处理块向喷洗控制块发出指令,控制盘刷支杆602下方盘刷605和刮板606,对地面进行水冲洗;s5.该工业机器人经过冲洗后的区域,经红外部3探测,红外探测块将信号传至数据处理块,辨别清理效果。
43.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。