1.本发明涉及控制机械系统中的电致动器的领域,该机械系统包括相对于固定元件可移动的可动元件。
背景技术:
2.许多机械系统结合一个或多个电致动器,例如机电致动器,这些致动器连接到电源,并受控以非常精准的方式相对于固定元件移动机械系统的可动元件。每个致动器都是根据控制关系进行控制的,例如,将供给致动器的电力参数与可动元件的位置或速度相关联。
3.当可动元件移动,两个部件的摩擦面进行彼此摩擦的接触时,有必要控制致动器,使其产生足够的力来克服此类摩擦,并使移动发生时不产生振动。为此,控制关系包括补偿结构,该补偿结构使致动器能够获得动力,从而克服摩擦,以平滑的方式移动可动元件。
4.现有的若干模型能够对摩擦进行建模。这些模型以接触表面上所存在的粗糙度性能为基础,粗糙度以弹簧叶片的形式建模成使得接触表面之一的弹簧叶片与其它接触表面的刚性叶片相互作用。
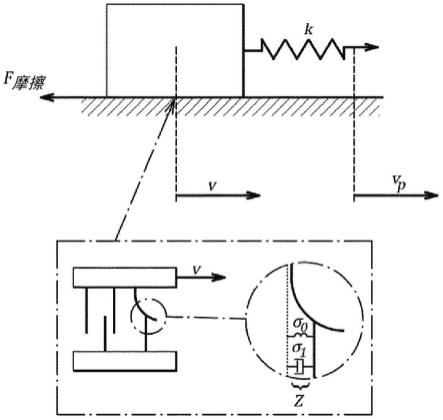
5.lugre模型可用于对在仅两个部件接触时的摩擦进行建模,并可从中导出稳定的摩擦补偿结构,如在文献de wit等人,“a new model for control of systems with friction(用于控制带摩擦系统的新模型)”,第419至425页,第3册40卷,ieee自动控制汇刊,1995,ieee中所述。图1示出了部件p,该部件p搁置在表面s上,以速度v移动,并带有与部件p的运动相对的摩擦力f,图1还示出了其根据lugre模型的表示。lugre模型随后写成以下形式:
[0006][0007]
其中:
[0008]
·
γf(t)是总摩擦力矩;
[0009]
·
σ0是弹簧叶片的刚度;
[0010]
·
σ1是弹簧叶片的运动的阻尼系数;
[0011]
·
σ2是粘性摩擦系数;
[0012]
·
γc是coulomb力矩;
[0013]
·
γs是stribeck或静摩擦力矩;
[0014]
·
ωs是stribeck角速度;以及
[0015]
·
ω是相对角速度。
[0016]
还存在比lugre模型更精准的其它摩擦模型,但它们的结构更复杂(因此实施起来更复杂),如de leuven模型(在文献lampaert等人,“modification of the leuven integrated friction model structure(leuven集成摩擦模型结构的修正)”,第683至687页,第4册47卷,ieee自动控制汇刊,2002,ieee中描述),或者广义maxwell滑动(gms)模型(lampaert等人,“a generalized maxwell-slip friction model appropriate for control purposes(适用于控制目的的广义maxwell滑动摩擦模型)”,第1170至1177页,第4卷,2003ieee工作负荷特征国际研讨会,2003,ieee)。由于其复杂性,这些模型也可用于对更复杂的机械架构进行建模。当多个接触表面相互嵌套时尤其如此,随着轴在第一衬套中发生枢转,而第一衬套本身又在第二衬套中枢转,第二衬套又在轴承中枢转,可能还有密封垫圈与运动部件中的一个或另一个摩擦:不可能确定轴和轴承之间所存在的总摩擦中的各种接触表面的单独贡献。
[0017]
然而,这些模型不能使其所模拟的摩擦以稳定的方式得到补偿。
技术实现要素:
[0018]
本发明的特定目的是提出用于改善对具有多个接触表面的机械系统的致动器进行控制的准度和精度的手段。
[0019]
为此,根据本发明,提供了一种控制具有多个嵌套的接触区的机械系统的电致动器的方法,该方法包括以下步骤:
[0020]
·
获取关于机械系统的数据,该系统包括多个嵌套的接触区;
[0021]
·
根据所述数据和与嵌套的接触区的数量相等的多个lugre模型准备系统模型,并确定模型参数和用于补偿嵌套的接触区的摩擦的补偿结构;
[0022]
·
将补偿结构包括在用于致动器的控制关系中;以及
[0023]
·
借助控制关系控制致动器。
[0024]
本发明的方法使得能够对任何类型的多重摩擦进行建模,并对以这种方式所建模的摩擦进行有效补偿,从而获得特别精准和稳定的控制关系。
[0025]
本发明的其它特征和优点将在阅读以下对本发明的具体和非限制性实施例的说明时显现。
附图说明
[0026]
参考附图,附图中:
[0027]
·
图1是摩擦情况以及传统lugre模型对其进行建模的方式的图示;
[0028]
·
图2是示出旋转的机械系统的示意图,可以在该机械系统中实施本发明的方法;
[0029]
·
图3是控制装置的示意图;
[0030]
·
图4是控制装置的补偿器的示意图示;以及
[0031]
·
图5是用于实施本发明的方法的伺服控制回路的示意图。
具体实施方式
[0032]
图2,用于说明本发明的操作的机械系统包括相对摩擦的四个部件,例如,诸如在定子中转动的电动机的转子,该转子被约束为与驱动轴一起旋转,该驱动轴在轴承中转动
以引导旋转。在这种布置中,至少有三个累积的摩擦区,可由四个相互同轴且相对旋转的部件1、2、3和4表示,这四个部件相互接触如下:
[0033]
·
部件1具有与部件2的内表面s2相接触的外表面s1';
[0034]
·
部件2具有与部件3的内表面s3相接触的外表面s2';
[0035]
·
部件3具有与部件4的内表面s4相接触的外表面s3';
[0036]
因此,系统具有三个摩擦区:s1'/s2、s2'/s3、以及s3'/s4。这些摩擦区据称是嵌套的。
[0037]
本发明的方法布置成控制构成机械系统的电致动器的电动机。该控制方法包括以下步骤:
[0038]
·
获取关于机械系统的数据,该系统包括m个嵌套的接触区;
[0039]
·
根据所述数据和并联的m个lugre模型,准备系统模型,称为m-lugre模型,其中m等于嵌套的接触区的数量,通过使用随机优化算法来确定模型参数,并确定用于补偿嵌套的接触区中的摩擦的补偿结构;
[0040]
·
将补偿结构包括在致动器的控制关系中;以及
[0041]
·
借助控制关系控制致动器。
[0042]
m-lugre模型将m个lugre模型i并联,以便计算总摩擦力矩γf(t)如下:
[0043][0044]
其中,对于每个模型i:
[0045]
·
σ
0,i
是代表摩擦粗糙度的弹簧叶片刚度;
[0046]
·
σ
1,i
是弹簧叶片的运动的阻尼系数;
[0047]
·
σ2是粘性摩擦系数(应当注意,任何使用σ
2,i
的需求都通过因式分解来避免);
[0048]
·
zi是叶片的平均变形;
[0049]
·
γ
c,i
是coulomb力矩;
[0050]
·
γ
s,i
是静摩擦力矩;
[0051]
·
ω
s,i
是stribeck角速度;以及
[0052]
·
ω是所测量的电动机的相对角速度。
[0053]
补偿结构是反馈型的,其基于对上述模型的估计,具有以下形式:
[0054]
[0055][0056]
ε=θ
c-θr.
[0057][0058]
其中:
[0059]
·
ε是输入设定点或参考信号(用于位置或速度)与结果输出信号θr(位置或速度,取决于输入设定点)之间的误差;
[0060]
·
变量k
s,i
的数量为m,确定它们是为了改善补偿器在面对诸如温度的外部条件的改变或系统本身的变化时的稳健性;以及
[0061]
·
其它参数和变量参考模型如上所述。
[0062]
补偿器的调整包括识别m-lugre模型的每个lugre模型i的所有参数的步骤,以及确定确保良好运行和确保稳定补偿器的变量k
s,1
,
…
,k
s,i
,
…
,k
s,m
的步骤。
[0063]
通过使用随机优化算法,尤其是是差分进化算法来限定m-lugre模型的参数。该算法在文件p.feyel等人,“lugre friction model identification and compensator tuning using a differential evolution algorithm(使用差分进化算法的lugre摩擦模型识别与补偿器调谐)”,第85至91页,2013ieee差分进化研讨会(sde),2013,ieee中描述。优选连续多次使用该算法,以便改进对模型参数的确定。如何确定算法的调整参数本身已知。可以使用差分进化算法的标准调整参数,诸如在文献r.storn and k.price,“differential evolution-a simple and efficient heuristic for global optimization over continuous spaces(差分进化——对连续空间进行全局优化的简单有效的启发式算法”,第341-359页,全球优化杂志11,kluwer高等学院出版社,1997中所述的调整参数。
[0064]
在本示例中,用于机械系统的数据包括机械系统的规格和在伺服控制回路上所执行的测试或模拟结果,例如如图5所示的系统的数据,该系统由直流(dc)电动机型的致动器致动,以便移动假定为纯惯性质量j的负载。可以理解,伺服控制回路接收设定点θc作为输入,并递送输出θr。根据设定点θc确定乘积js2以及误差ε,js2是使负载移动过角度θc所需的力矩,ε是设定点θc和输出θr之间的误差。误差ε用于校正器k(s),该校正器k(s)递送与coulomb力矩γc相对应的指令,从γc中减去从输出中提取的总摩擦力γs()。该减法结果除以乘积js2,以得到输出θr。
[0065]
获取不同场景(对应于不同的使用条件,尤其是温度,以及每个使用条件的不同电源参数)的数据,作为示例,数据可包括:供给电致动器的电源参数(电压、电流)、致动器所递送的根据电源参数而变化的运动速度和力、将在机械系统的输出处获得的运动速度和力,
…
,采样这些信号。
[0066]
此后,差分进化算法与以下成本函数一起用于温度tc:
[0067]
[0068]
其中:
[0069]
·
nm是场景的数量;
[0070]
·ns,k
是样本的数量;以及
[0071]
·
是使用以下决策向量(σ
0,i
,σ
1,i
,σ2,γ
c,i
,γ
s,i
,ω
s,i
)进行模拟的模型的输出,其中i在1至m之间变化,因此需要调整(5m 1)个参数的向量。
[0072]
一旦确定了各种场景的m-lugre模型的参数,就能够在图4的伺服控制回路的基础上运行模拟,以确定指令和给定变量集ks,1,
…
,ks,i,
…
,k
s,m
的采样误差。为此,再次使用差分进化算法,但与以下成本函数一起使用:
[0073][0074]
其中:
[0075]
·nt
是所测试的场景的数量;
[0076]
·ns,k
是样本的数量;
[0077]
·
γ
c,k
是指令;以及
[0078]
·
α和β是经选择的正实数,用于协调数量级,或给予误差、指令或指令的变化更大的重要性。例如,如果α和β远小于1,则会放大误差;如果β为零,则指令的导数高。
[0079]
图3和4示出了某系统的反馈型补偿器,该系统由直流电动机型的致动器移动假定为纯惯性质量j的负载。
[0080]
可以理解,补偿器接收设定值θc作为输入,从该设定值θc和输出θr之间确定乘积js2和误差ε。在本示例中,补偿器具有本身已知的补偿结构(de wit等人,“a new model for control of systems with friction(用于控制带摩擦系统的新模型)”,第419至425页,第3册40卷,ieee自动控制汇刊,1995,ieee)。误差ε用于校正器k(s)和补偿器两者的输出被加到乘积js2中,以获得coulomb力矩γc,从coulomb力矩γc中减去模型所产生的总摩擦力γs()。该减法结果除以乘积js2,以得到输出θr。
[0081]
这产生了包含摩擦补偿的控制关系,由于原始lugre补偿的结构得到了保持,这种控制关系可用于以有效、平滑和稳定的方式控制致动器。
[0082]
当然,本发明不限于所描述的实施方式,而是涵盖落入由权利要求所限定的本发明领域内的任何变型。
[0083]
具体地,本发明的方法可用于控制任何类型的机械系统的致动器。这样的机械系统是为了产生可动元件的精准运动,例如,用于将光学构件或慢性构件对准给定方向。机械系统可包括可旋转移动和/或平移移动的部件。
[0084]
术语“lugre模型”用于既包括最初定义的lugre模型,也包括其衍生物,如dahl模型和coulomb模型。
[0085]
补偿结构可以是反馈型以外的类型,例如,其可以是前馈型。
[0086]
可以使用一些其它随机算法,或者使用随机算法以外的算法。例如,可以使用单纯形法、模式搜索算法、次梯度法算法、坐标下降算法,
…
[0087]
使用无梯度的全局优化算法(在文献中称为“无导数优化算法”)可以更容易地执行该方法,但并不必需。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
