1.本发明属于目标检测与追踪领域,具体涉及一种察打武器系统,还涉及一种察打武器随动跟踪控制方法。
背景技术:
2.机载光电稳定跟踪平台和机载火箭弹发射系统是微型智能察打武器的重要组成,机载光电稳定跟踪平台需要保持光电成像系统的视轴一直保持稳定,机载火箭弹发射系统需要保持对目标的实时瞄准,然而机载光电稳定跟踪平台和机载火箭弹发射系统在工作过程中容易受到载机的运动干扰和环境的影响,其控制性能受到非线性摩擦、陀螺仪漂移、系统振动等因素的影响,并且,无人机的工作环境存在各种不确定因素,在短兵相接的战场环境下,最佳的攻击机会稍纵即逝,因此,在硬件固定的条件下,机载光电稳定跟踪平台和机载火箭弹发射系统的随动跟踪控制方法对察打武器系统具有重要意义。
3.关于机载光电稳定跟踪平台的研究很多,但是微型智能察打武器平台相比于一般的机载光电稳定跟踪平台多出了一套火箭弹发射系统,由于机载微型火箭弹在空中飞行的时间从几秒到几十秒不等,单纯的随动跟踪不能满足其对动态目标的打击需求。
技术实现要素:
4.为此,本发明所要解决的技术问题是提供一种满足对动态目标打击需求的察打武器平台随动跟踪方法,实现在飞行姿态下对目标的持续锁定与跟踪。
5.本发明的上述技术目的通过以下技术方案实现:
6.一种察打武器系统,包括光电追踪系统以及光电伺服系统;
7.所述光电追踪系统包括集成于中央平台(1)的可见光成像装置、红外成像装置、激光测距装置、gnss以及imu;
8.所述光电伺服系统包括俯仰调节子系统和方向调节子系统;所述俯仰调节子系统和所述方向调节子系统均与中央平台(1)连接;
9.所述俯仰调节子系统控制所述中央平台(1)沿竖直方向的轴线运动;所述方向调节子系统控制所述中央平台(1)沿水平方向的轴线运动;
10.所述中央平台(1)通过所述方向调节子系统连接发射仓(2);所述发射仓 (2)内填装火箭弹。
11.优选地,所述俯仰调节子系统包括两组俯仰电机,每一组俯仰电机均包括光电俯仰电机和发射仓俯仰电机,每一组俯仰电机分别对应连接于中央平台两侧,所述光电俯仰电机(连接光电俯仰轴齿轮,所述发射仓俯仰电机连接发射仓俯仰轴齿轮,所述发射仓俯仰轴齿轮通过俯仰轴连接发射仓,所述光电俯仰轴齿轮通过俯仰轴连接中央平台,所述俯仰轴还与俯仰轴编码器连接。
12.一种察打武器系统随动跟踪控制方法,包括如下步骤:
13.s1、无人机搭载察打武器系统飞往目标区域,通过可见光成像装置和红外成像装
置持续获取目标区域的图像信息;察打武器系统从目标区域的图像信息中标定目标,获取目标的位置信息和姿态信息;
14.s2、根据步骤s1中的位置信息和姿态信息解算目标与图像信息的图像中心之间的脱靶量,计算目标与图像中心之间的角度差,然后,根据所述角度差调整光电伺服系统的俯仰角和方向角,保持调整后目标位于图像中心处;
15.s3、激光测距装置测量察打武器系统与目标之间的相对距离和相对角度;从射表中查询当前的相对距离和相对角度下,所对应的向目标发射弹药的发射角度;
16.若发射角度小于预定阈值,向目标发射火箭弹;
17.若发射角度大于预定阈值,间隔30ms进行弹道解算,计算无人机当前位置的发射角度,同时对察打武器系统进行姿态校准和对目标的随动追踪,直至解算出的发射角度小于预定阈值。
18.步骤s3中对察打武器进行姿态校准和对目标的稳定追踪的具体步骤如下:
19.s3.1、姿态调整:以无人机位置为基准坐标系、俯仰子系统的俯仰轴为俯仰坐标系、方向调节子系统的方向轴为偏航坐标系,建立三者之间的数学关系,如下:
[0020][0021][0022]
其中,
[0023]
分别为基础坐标系、偏航坐标系和俯仰坐标系的角速度;
[0024]
脚标x、y、z分别为坐标轴;
[0025]
θ
p
为俯仰轴的运动角度,θa为方向轴的运动角度;
[0026]
为基体坐标到偏航坐标的变换矩阵:
[0027][0028]
表示从偏航坐标到俯仰坐标的变换矩阵;
[0029][0030]
根据上述公式依次解出关于俯仰轴和方向轴的动力学参数,计算出两者的动力学模型;
[0031]
将通过察打武器系统所采集到的目标的位置信息和无人机姿态信息代入动力学模型中,解算出需要调整姿态的参数,按照参数对察打武器系统进行姿态调整;
[0032]
s3.2、随动跟踪:建立自适应模糊反步控制器,在所述自适应模糊反步控制器下实现对目标的随动跟踪;
[0033]
首先,建立如下模糊逻辑系统:
[0034]r′
:if x
1 is f
1l and x
2 is
ꢀꢀ
and,...,
[0035]
x
n is
ꢀꢀ
then y is g
l
,l=1,2,...,n;
[0036]
其中,
[0037]
x=(x1,x2,
…
,xn)
t
是系统输入;
[0038]
y是系统输出;
[0039]fil
和g
l
分别为模糊集;
[0040]
n表示规则数;
[0041]
所述模糊逻辑系统中,系统输出与输入之间的函数关系为:
[0042][0043]
其中,
[0044][0044]
和分别是f
il
和g
l
的隶属函数;
[0045]
解得,
[0046][0047]
y(x)=γ
t
φ(x);
[0048]
其中,
[0049]
和φ(x)=[φ1(x),...,φn(x)]
t
分别是理想常数权向量和基函数向量;
[0050]
然后,定义误差向量:
[0051]
z1=x
1-x
1r
[0052]
z2=x
2-α1[0053][0054]
之后通过反步法设计控制器;
[0055]
计算出虚拟控制量和自适应律:
[0056][0057][0058][0059]
然后计算出实际控制律:
[0060][0061]
然后完成控制器设计,将目标的位置信息相对于察大武器系统的坐标和无人机姿态信息代入控制器中,察打武器系统中的俯仰调节子系统、方向调节子系统自动调节,实现对目标的随动跟踪。
[0062]
所述步骤s3.3的弹道解算方法具体为,建立如下弹道解算方程式,解出发射角度:
[0063][0064]
其中,
[0065][0066][0067][0068][0069][0070]
[0071][0072][0073][0074][0075]vrξ
=(v-w
x2
)cosδ
2 cosδ
1-w
y2 cosδ
2 sinδ
1-w
z2 sinδ2;
[0076]
δr=arc cos(v
rξ
/vr);
[0077][0078][0079]
m为火箭弹质量;
[0080]
d为火箭弹长度;
[0081]
l为火箭弹长度;
[0082]
s为火箭弹横截面积;
[0083]cx
为阻力系数;
[0084]cy
为升力系数;
[0085]cz
为马格努斯力系数;
[0086]mz
为静力矩系数;
[0087]mzz
′
为赤道阻尼力矩系数导数;
[0088]mxz
′
为极阻尼力矩系数导数;
[0089]my
′
为magnus力矩系数导数;
[0090]
为弹道坐标系轴的力分量;
[0091]
为弹道坐标系轴的力矩分量;
[0092]
v为火箭弹飞行速度;
[0093]
vr为火箭弹相对无人机速度;
[0094]
为火箭弹相对无人机速度在弹轴系分量;
[0095]
为火箭弹相对无人机速度在第二弹轴系的分量;
[0096]
β第一第二弹轴系转角;
[0097]wx
为纵风;
[0098]
wz为横风;
[0099]
为风速沿弹轴系轴的分量。
[0100]
在对火箭弹进行弹道解算时,还包括超前预测,具体包括如下步骤:
[0101]
s3.4、在得到一组弹道解算数据后,纪录此次火箭弹的预计飞行时间t0;
[0102]
s3.5、计算一组飞行时间为t=t0 t1的弹道解算数据;
[0103]
其中,t1为预测时间,所述预测时间小于光电伺服系统完成一次随动跟踪所需的时间;
[0104]
s.3.6,从步骤s3.4得到一组弹道解算数据计时至达到时间t时,向目标发射火箭弹。
[0105]
本发明的上述技术方案,相比现有技术具有以下优点:
[0106]
本发明考虑到微型智能察打武器系统的使用特点,适用于察打武器系统在各种外界扰动和自身振动或摩擦条件下,机载光电平台的随动跟踪,保证视轴始终指向目标,机载发射系统的稳定瞄准,对目标进行持续的弹道锁定。
[0107]
本发明在控制算法中引入模糊控制和自适应控制,使得控制方法能够适用于各种环境,具有更好的环境适应性,使得武器平台减少对作战使用环境的依赖。
[0108]
本发明在瞄准控制中增加了目标运动和自身运动的计算和预测,考虑了火箭弹在空中飞行的时间,使得发射系统瞄准更加准确。
附图说明
[0109]
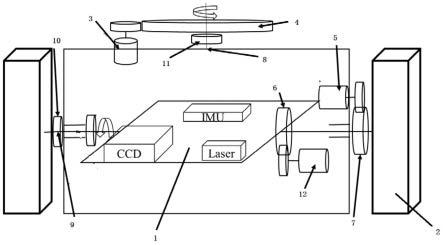
图1是本发明实施例提供的察打武器系统的结构示意图;
[0110]
图2是本发明实施例提供的察打武器系统中各坐标系的示意图;
[0111]
其中,1、中央平台;2、发射仓;3、方位电机;4、方位齿轮;5、发射仓俯仰电机;6、光电俯仰轴齿轮;7、发射仓俯仰轴齿轮;8、方位轴;9、俯仰轴;10、俯仰轴编码器;11、方位轴编码器;12、光电俯仰电机。
具体实施方式
[0112]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0113]
实施例一
[0114]
如图1所示,本实施例提供一种察打武器系统,包括光电追踪系统以及光电伺服系统。
[0115]
所述光电追踪系统包括集成于中央平台1的可见光成像装置、红外成像装置、激光测距装置、gnss以及imu;
[0116]
所述光电伺服系统包括俯仰调节子系统和方向调节子系统;所述俯仰调节子系统和所述方向调节子系统均与中央平台1连接;
[0117]
所述方向调节子系统包括方位电机3,所述方位电机3通过方位齿轮4 连接方位轴8,所述方位轴11与中央平台1连接,所述方位齿轮4与方位轴编码器11连接;
[0118]
所述俯仰调节子系统包括两组俯仰电机,每一组俯仰电机均包括光电俯仰电机12和发射仓俯仰电机5,每一组俯仰电机分别对应连接于中央平台1 两侧,所述光电俯仰电机12连接光电俯仰轴齿轮6,所述发射仓俯仰电机5 连接发射仓俯仰轴齿轮7,所述发射仓俯仰轴齿轮7通过俯仰轴9连接发射仓2,所述光电俯仰轴齿轮6通过俯仰轴9连接中央平台1,所述俯仰轴9 还与俯仰轴编码器10连接。具体地,本实施例中的俯仰轴包括两段独立运动的光电俯仰轴和发射俯仰轴(图中未示出),光电俯仰轴与中央平台1连接,发射俯仰轴与发射仓2连接,以实现俯仰调节子系统对发射仓和中央平台的独立俯仰控制。
[0119]
所述发射仓2内填装火箭弹,火箭弹在光电追踪系统实现对目标的追踪之后,接收指令对目标进行打击。
[0120]
本系统在无人机搭载的情况下,通过光电追踪系统获取目标的位置信息,然后通过光电伺服系统调整发射仓的位置,向目标发射火箭弹实现对目标的随动跟踪以及打击。
[0121]
实施例二
[0122]
本实施例提供一种察打武器随动跟踪与瞄准方法,包括如下步骤:
[0123]
s1、无人机搭载察打武器系统飞往目标区域,通过可见光成像装置和红外成像装置持续获取目标区域的图像信息;察打武器系统从目标区域的图像信息中标定目标,获取目标的位置信息和姿态信息;
[0124]
s2、根据步骤s1中的位置信息和姿态信息解算目标与图像信息的图像中心之间的脱靶量,计算目标与图像中心之间的角度差,然后,根据所述角度差调整光电伺服系统的俯仰角和方向角,保持调整后目标位于图像中心处;
[0125]
s3、激光测距装置测量察打武器系统与目标之间的相对距离和相对角度;从射表中查询当前的相对距离和相对角度下,所对应的向目标发射弹药的发射角度;
[0126]
若发射角度小于预定阈值,向目标发射火箭弹;
[0127]
若发射角度大于预定阈值,间隔30ms进行弹道解算,计算无人机当前位置的发射角度,同时对察打武器系统进行姿态校准和对目标的随动追踪,直至解算出的发射角度小于预定阈值。
[0128]
步骤s3中对察打武器进行姿态校准和对目标的稳定追踪的具体步骤如下:
[0129]
s3.1、姿态调整:以无人机位置为基准坐标系、俯仰子系统的俯仰轴为俯仰坐标系、方向调节子系统的方向轴为偏航坐标系,建立三者之间的数学关系,如下:
[0130][0131][0132]
其中,
[0133]
分别为基础坐标系、偏航坐标系和俯仰坐标系的角速度;
[0134]
脚标x、y、z分别为坐标轴;
[0135]
θ
p
为俯仰轴的运动角度,θa为方向轴的运动角度;
[0136]
为基体坐标到偏航坐标的变换矩阵:
[0137][0138]
表示从偏航坐标到俯仰坐标的变换矩阵;
[0139][0140]
根据上述公式依次解出关于俯仰轴和方向轴的动力学参数,计算出两者的动力学模型。
[0141]
本步骤中建立俯仰轴和方向轴的动力学模型的具体过程如下,由于俯仰轴和方向轴的动力学模型仅输入参数不同,在本实施例中以俯仰轴的动力学模型为例。
[0142]
首先计算俯仰角动量矩和方向角动量矩:
[0143][0144][0145]
计算驱动力矩:
[0146][0147]
计算方向轴的转动惯量和俯仰轴的转动惯量:
[0148]
ja=diag(j
ax
,j
ay
,j
az
);
[0149]jp
=diag(j
px
,j
py
,j
pz
);
[0150]
建立如下动力学模型:
[0151][0152][0153]
其中,脚标p、a分别表示俯仰轴和方向轴、脚标x、y、z表示坐标轴;
[0154]
然后,计算各电机(方向电机、俯仰电机)的输出力矩:
[0155][0156]
其中,jm,bm为电机的惯性对角矩阵和阻尼对角矩阵,r是减速比,ia电机电流,km为对角常数矩阵。
[0157]
计算电压的输出:
[0158][0159]
式中:kb,r和l分别为反电动势常数、电机的电阻和电感的n
×
n 对角矩阵;
[0160]
定义状态向量:
[0161][0162][0163]
[0164][0165]
其中,
[0166][0167]
b=l-1
;
[0168][0169]
f2=-l-1
kbr-1
x
2-l-1
rx3;
[0170]
计算出所有相关的参数后,完成动力学模型设计。
[0171]
将通过察打武器系统所采集到的目标的位置信息和无人机的姿态信息代入动力学模型中,解算出需要调整姿态的参数,根据解算后的参数察打武器系统控制光电俯仰系统中的方位调节子系统和俯仰调节子系统进行姿态调整。
[0172]
s3.2、随动跟踪:建立自适应模糊反步控制器,在所述自适应模糊反步控制器下实现对目标的随动跟踪;
[0173]
首先,建立如下模糊逻辑系统:
[0174]rl
:if x
1 is f
1l and x
2 is
ꢀꢀ
and,...,
[0175]
x
n is
ꢀꢀ
then y is g
l
,l=1,2,...,n;
[0176]
其中,
[0177]
x=(x1,x2,
…
,xn)
t
是系统输入;
[0178]
y是系统输出;
[0179]fil
和g
l
分别为模糊集;
[0180]
n表示规则数;
[0181]
所述模糊逻辑系统中,系统输出与输入之间的函数关系为:
[0182][0183]
其中,
[0184][0184]
和分别是f
il
和g
l
的隶属函数;
[0185]
解得,
[0186][0187]
y(x)=γ
t
φ(x);
[0188]
其中,
[0189]
和φ(x)=[φ1(x),...,φn(x)]
t
分别是理想常数权向量和基函数向量;
[0190]
然后,定义误差向量:
[0191]
z1=x
1-x
1r
[0192]
z2=x
2-α1[0193][0194]
之后通过反步法设计控制器;
[0195]
计算出虚拟控制量和自适应律:
[0196][0197][0198][0199]
然后计算出实际控制律:
[0200][0201]
然后完成控制器设计,将采集到的目标的位置信息相对于武器系统的坐标(x,y,z)和无人机姿态信息(θa和θ
p
)代入控制器中,察打武器系统中的俯仰调节子系统、方向调节
子系统自动调节,实现对目标的随动跟踪。
[0202]
所述步骤s3.3的弹道解算方法具体为,建立如下弹道解算方程式,解出发射角度:
[0203][0204]
其中,
[0205][0206][0207][0208][0209]
[0210][0211][0212][0213][0214][0215]vrξ
=(v-w
x2
)cosδ
2 cosδ
1-w
y2 cosδ
2 sinδ
1-w
z2 sinδ2;
[0216]
δr=arccos(v
rξ
/vr);
[0217][0218][0219]
m为火箭弹质量;
[0220]
d为火箭弹长度;
[0221]
l为火箭弹长度;
[0222]
s为火箭弹横截面积;
[0223]cx
为阻力系数;
[0224]cy
为升力系数;
[0225]cz
为马格努斯力系数;
[0226]mz
为静力矩系数;
[0227]mzz
′
为赤道阻尼力矩系数导数;
[0228]mxz
′
为极阻尼力矩系数导数;
[0229]my
′
为magnus力矩系数导数;
[0230]
为弹道坐标系轴的力分量;
[0231]
为弹道坐标系轴的力矩分量;
[0232]
v为火箭弹飞行速度;
[0233]
vr为火箭弹相对无人机速度;
[0234]
为火箭弹相对无人机速度在弹轴系分量;
[0235]
为火箭弹相对无人机速度在第二弹轴系的分量;
[0236]
β第一第二弹轴系转角;
[0237]wx
为纵风;
[0238]
wz为横风;
[0239]
为风速沿弹轴系轴的分量上述的弹道解算过程中,还包括超前预测过程,具体包括如下步骤:
[0240]
s3.4、在得到一组弹道解算数据后,纪录此次火箭弹的预计飞行时间t0;
[0241]
s3.5、计算一组飞行时间为t=t0 t1的弹道解算数据;
[0242]
其中,t1为预测时间,所述预测时间小于光电伺服系统完成一次随动跟踪所需的时间;
[0243]
s.3.6,从步骤s3.4得到一组弹道解算数据计时至达到时间t时,向目标发射火箭弹。
[0244]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
