1.本技术涉及无人机技术领域,尤其涉及一种无人机及其控制方法、系统、手持控制设备、头戴设备和存储介质。
背景技术:
2.无人机,在航拍、巡检、森林防护、灾情勘察及农药喷洒等场景,得到了广泛应用,但是现有的操作员对于无人机的控制,主要是通过遥控器的摇杆进行,控制方法单一,用户体验不好。
技术实现要素:
3.本技术提供了一种无人机及其控制方法、系统、手持控制设备、头戴设备和存储介质,使得无人机的飞行操纵更加容易和安全。
4.第一方面,本技术实施例提供了一种无人机的控制方法,所述方法包括:
5.获取手持控制设备的姿态信息;
6.根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;
7.将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
8.第二方面,本技术实施例提供了一种手持控制设备,所述手持控制设备包括:
9.姿态传感器,用于获取所述手持控制设备的姿态信息;
10.通信模块,用于将所述手持控制设备的姿态信息发送给无人机,以使得所述无人机根据所述手持控制设备的姿态信息,确定所述无人机的控制信息,并将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
11.第三方面,本技术实施例提供了一种手持控制设备,所述手持控制设备包括:
12.姿态传感器,用于获取所述手持控制设备的姿态信息;
13.一个或多个处理器,单独地或共同地工作,用于根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;
14.通信模块,用于将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
15.第四方面,本技术实施例提供了一种无人机,所述无人机包括:
16.第一通信模块,用于获取手持控制设备的姿态信息;
17.一个或多个处理器,单独地或共同地工作,用于根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;
18.第二通信模块,用于将所述无人机的控制信息发送给头戴设备,以使得所述头戴
设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
19.第五方面,本技术实施例提供了一种无人机的控制方法,所述方法包括:
20.获取无人机的控制信息,所述无人机的控制信息是根据手持控制设备的姿态信息确定的,所述无人机的控制信息用于调整所述无人机的姿态或者调整所述无人机的云台的姿态;
21.根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
22.第六方面,本技术实施例提供了一种头戴设备,所述头戴设备包括:
23.通信模块,用于获取无人机的控制信息,所述无人机的控制信息是根据手持控制设备的姿态信息确定的;
24.一个或多个处理器,单独地或共同地工作,用于根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
25.第七方面,本技术实施例提供了一种无人机的控制方法,所述方法包括:
26.获取手持控制设备的姿态信息,所述手持控制设备的姿态信息用于确定所述无人机的控制信息,所述无人机的控制信息用于调整所述无人机的姿态或者调整所述无人机的云台的姿态;
27.根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
28.第八方面,本技术实施例提供了一种头戴设备,所述头戴设备包括:
29.通信模块,用于获取手持控制设备的姿态信息;
30.一个或多个处理器,单独地或共同地工作,用于根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
31.第九方面,本技术实施例提供了一种无人机的控制系统,所述控制系统包括:
32.手持控制设备,用于获取所述手持控制设备的姿态信息,所述姿态信息用于确定无人机的控制信息;
33.无人机,用于根据所述无人机的控制信息调整所述无人机的姿态或者调整所述无人机的云台的姿态;
34.头戴设备,用于根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
35.第十方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述的方法。
36.本技术实施例提供了一种无人机及其控制方法、系统、手持控制设备、头戴设备和存储介质,通过获取手持控制设备的姿态信息,根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。使得用户可以通过调整手持控制设备的姿态来控制无人机,符合人类直觉。通过显示标记指示所述无人机的飞行方向,能够带给用户更直观的操控体验,使得飞行操纵更加容易和安全。
37.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术实施例的公开内容。
附图说明
38.为了更清楚地说明本技术实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
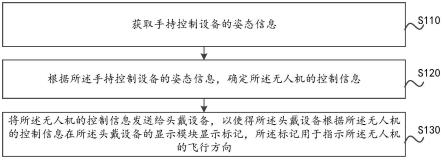
39.图1是本技术实施例提供的一种无人机的控制方法的流程示意图;
40.图2是一实施方式中无人机、手持控制设备、头戴设备通信连接的示意图;
41.图3是一实施方式中手持控制设备的结构示意图;
42.图4是一实施方式中手持控制设备的坐标系的示意图;
43.图5是一实施方式中手持控制设备在yaw方向调整姿态的示意图;
44.图6是一实施方式中手持控制设备在roll方向调整姿态的示意图;
45.图7是一实施方式中手持控制设备在pitch方向调整姿态的示意图;
46.图8是一实施方式中根据手持控制设备的yaw角确定无人机在yaw方向上转动的示意图;
47.图9是一实施方式中根据手持控制设备的roll角确定无人机在yaw方向上转动的示意图;
48.图10是一实施方式中根据手持控制设备的pitch角确定无人机的云台在pitch方向上转动的示意图;
49.图11是一实施方式中控制无人机朝向标记指示的飞行方向飞行的示意图;
50.图12是一实施方式中手持控制设备控制无人机时的速度映射示意图;
51.图13是一实施方式中无人机控制过程的示意图;
52.图14是本技术一实施例提供的一种手持控制设备的示意性框图;
53.图15是本技术另一实施例提供的一种手持控制设备的示意性框图;
54.图16是本技术实施例提供的一种无人机的示意性框图;
55.图17是本技术一实施例提供的一种头戴设备的示意性框图;
56.图18是本技术另一实施例提供的一种头戴设备的示意性框图;
57.图19是本技术另一实施例提供的一种无人机的控制方法的流程示意图;
58.图20是本技术又一实施例提供的一种无人机的控制方法的流程示意图。
具体实施方式
59.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
60.附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。
61.下面结合附图,对本技术的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。
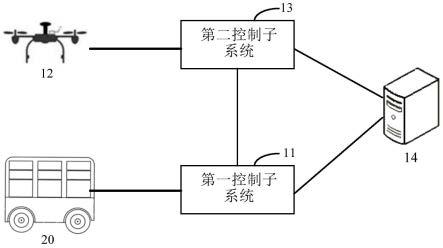
62.请参阅图1,图1是本技术实施例提供的一种无人机的控制方法的流程示意图。如图2是该控制方法的应用场景的示意图。
63.如图2所示,无人机控制系统包括无人机、手持控制设备和头戴设备。
64.所述无人机的控制方法可以应用在无人机或者手持控制设备,用于根据手持控制设备的姿态信息控制无人机等过程。
65.在一些实施方式中,无人机的控制方法应用在无人机。无人机可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
66.在一些实施方式中,无人机的控制方法应用在手持控制设备。手持控制设备获取自身的姿态信息,根据姿态信息确定所述无人机的控制信息,将所述无人机的控制信息发送给无人机以使无人机根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
67.在其他一些实施方式中,无人机的控制方法可以应用在头戴设备。例如头戴设备可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,以及将所述无人机的控制信息发送给无人机,以使无人机根据控制信息执行对应的动作,头戴设备还可以根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
68.通过在所述头戴设备的显示模块显示标记指示所述无人机的飞行方向,用户更加容易熟悉通过手持控制设备控制无人机飞行。
69.在一些实施方式中,无人机包括拍摄设备。无人机可以将所述拍摄设备拍摄得到的图像信息发送给所述头戴设备,以使的所述头戴设备的显示模块叠加显示所述图像信息和所述标记。用户可以直观的从头戴设备的显示模块上看到飞行方向对应的景物,从而预判拍摄效果和碰撞风险。通过在头戴设备的显示模块显示无人机回传给头戴设备的图像,即图传画面,用户在佩戴头戴设备控制无人机飞行时,能够在自己视野范围内控制无人机的运动方向,控制更加直观。有鸟儿飞行一般的体验。
70.示例性的,手持控制设备的姿态信息可以直接发给无人机,如图2所示,通过与所述无人机之间的信道将所述姿态信息发送给所述无人机。
71.可以理解的,图2中手持控制设备、无人机和头戴设备之间的通信连接仅为一种实施方式,在另一些实施方式中,手持控制设备可以通过头戴设备与无人机通信连接,或者头戴设备可以通过手持控制设备与无人机通信连接。在其他一些实施方式中,手持控制设备和头戴设备可以通过中继设备与无人机通信连接。
72.示例性的,手持控制设备的姿态信息可以通过头戴设备发给无人机,例如手持控制设备在连上头戴设备时,手持控制设备的姿态信息先发给头戴设备,再由头戴设备转发给无人机,可以通过头戴设备与无人机之间的信道传输姿态信息,该信道具有高增益,传输
更可靠。
73.示例性的,手持控制设备确定的无人机的控制信息可以直接发给无人机,或者为可以通过头戴设备发给无人机,传输更可靠。
74.其中,无人机可以为旋翼型无人机,例如四旋翼无人机、六旋翼无人机、八旋翼无人机,也可以是固定翼无人机。头戴设备可以为飞行眼镜,例如为第一视角(fpv,first person view)眼镜。
75.手持控制设备例如包括体感遥控器。在一实施方式中,如图3所示,手持控制设备包括多个按键,以及油门控制部件11,其中按键例如包括加解锁(lock)键12、档位按键13、急停(刹车)按键14。可以理解的,不同功能对应的按键和/或按键的功能触发逻辑可以根据实际情况设置。
76.示例性的,油门控制部件例如包括可拉动的油门杆,当然也可以包括其他形式的控制部件,如旋钮、扳机等。用户通过改变手持控制设备的姿态、操作手持控制设备的按键、油门控制部件可以实现对无人机的飞行控制。
77.示例性的,手持控制设备包括传感器,手持控制设备的传感器用于采集手持控制设备的姿态信息,该姿态信息包括体感传感器的俯仰角、偏航角、横滚角、水平方式的移动速度、垂直方向的移动速度、离地高度中的至少一项。举例而言,手持控制设备的传感器可以包括惯性测量单元(inertial measurement unit,imu)、指南针、重力传感器、距离传感器的至少一项。
78.在一些实施方式中,手持控制设备、头戴设备和无人机之间通过无线信道传输数据。
79.示例性的,如图2所示,从无人机到手持控制设备、头戴设备的无线信道,称为下行信道,用于传输无人机采集到的数据,例如视频、图片、传感器数据、以及无人机的状态信息(osd)等遥测数据。
80.示例性的,如图2所示,从手持控制设备、头戴设备到无人机的无线信道,称为上行信道,用于传输遥控数据;例如上行信道用于传输飞控指令以及拍照、录像、返航等控制指令。
81.如图1所示,本技术实施例的无人机的控制方法包括步骤s110至步骤s130。
82.s110、获取手持控制设备的姿态信息。
83.示例性的,根据手持控制设备自身的三轴加速度信号和角速度信号,通过融合算法可以得到手持控制设备的姿态信息,手持控制设备的姿态信息例如包括手持控制设备自身相对于大地坐标系的转动四元数。
84.示例性的,所述手持控制设备的姿态信息包括北东地坐标系下的姿态信息,可选的,也可以是其他坐标系,如东北天坐标系。
85.在一些实施方式中,手持控制设备对应的坐标系如图4所示。如图4所示,手持控制设备的下方为z轴方向,右侧为y轴方向,前方为x轴方向。
86.示例性的,如图5所示,手持控制设备绕z轴转动时可以称为在yaw(偏航)方向调整姿态;如图6所示,手持控制设备绕x轴转动时可以称为在roll(翻滚)方向调整姿态,如图7所示,手持控制设备绕y轴转动时可以称为在pitch(俯仰)方向调整姿态。
87.示例性的,手持控制设备绕z轴转动的角度可以称为yaw角,绕y轴转动的角度可以
称为pitch角,绕x轴转动的角度可以称为roll角。在一些实施方式中,手持控制设备的姿态信息包括yaw角、roll角、pitch角中的至少一项。可以理解的,手持控制设备的姿态调整可以分解为个方向上的转动,因此可以确定手持控制设备的yaw角、roll角和pitch角。
88.s120、根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
89.示例性的,可以根据手持控制设备在各个方向上的姿态调整角度确定无人机的控制信息,无人机的控制信息用于控制无人机调整无人机的机体的姿态和/或无人机搭载的云台的姿态。
90.示例性的,如图8所示,根据手持控制设备的yaw角确定的控制信息用于控制无人机在yaw方向上转动。当然也不限于此。如图9所示,根据手持控制设备的roll角确定的控制信息也可以用于控制无人机在yaw方向上转动。如图10所示,根据手持控制设备的pitch角确定的控制信息也可以用于控制无人机的云台在pitch方向上的转动。
91.s130、将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
92.在一些实施方式中,如图8和图9所示,在无人机的控制信息用于指示无人机向左或向右运动(在yaw方向上转动)时,标记21向左或向右移动,在显示模块的横向方向上偏离中央位置;如图10所示,在无人机的控制信息用于指示无人机的云台做俯仰运动(在pitch方向上转动)时,标记21向上或向下移动,在显示模块的垂直方向上偏离中央位置;在无人机的控制信息用于指示无人机保持姿态不变时,所述标记在所述显示模块的显示界面的预设位置显示,举例而言,所述预设位置位于所述显示界面的正中间。从而可以实现例如用户将手持控制设备指向哪里,在对手持控制设备的油门控制部件进行操作时,无人机就飞向哪里的效果,用户更加容易熟悉通过手持控制设备控制无人机飞行。
93.通过在头戴设备的显示模块显示标记,指示所述无人机的飞行方向,能够带给用户更直观的操控体验。用户通过调整手持控制设备的姿态,可以调整该标记在显示模块中的显示位置,该标记可以显示模块上指示未来无人机的运动方向,使得飞行操纵更加容易和安全。
94.示例性的,当手持控制设备的前方为x轴方向时,可以根据手持控制设备的x轴方向指示无人机的运动方向。可以理解的,x轴方向可以作为“手电筒”发出的光线指示无人机的运动方向,因此根据手持控制设备的姿态信息控制无人机的运动方向,可以称为手电筒模式。
95.在一些实施方式中,所述无人机包括拍摄设备。
96.示例性的,所述方法还包括:将所述拍摄设备拍摄得到的图像信息发送给所述头戴设备,以使的所述头戴设备的显示模块叠加显示所述图像信息和所述标记。用户可以直观的从头戴设备的显示模块上看到飞行方向对应的景物,从而预判拍摄效果和碰撞风险。通过在头戴设备的显示模块显示无人机回传给头戴设备的图像,即图传画面,用户在佩戴头戴设备控制无人机飞行时,能够在自己视野范围内控制无人机的运动方向,控制更加直观。有鸟儿飞行一般的体验。
97.示例性的,所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,包括:所述头戴设备根据所述无人机的控制信息、所述显示模块的显示参数计算
所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
98.示例性的,无人机的控制信息指示的无人机的姿态变化幅度越大,则所述显示模块显示的标记偏离预设位置的距离越大。因此显示模块显示的标记可以体现无人机的姿态变化幅度,便于向用户反馈无人机的飞行方向。
99.示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。因此可以与不同规格的显示模块适配,更准确的指示所述无人机的飞行方向。
100.在一些实施方式中,所述拍摄设备通过云台安装于所述无人机。根据所述手持控制设备的姿态信息,可以调整无人机和/或云台的姿态,从而可以调整拍摄设备的拍摄方向,便于用户在头戴设备的显示模块观察拍摄方向对应视场的景物。
101.示例性的,无人机搭载的云台也可以跟随手持控制设备姿态的调整而转动,可以使得无人机的飞行方向和显示模块显示的所述标记在头戴设备的视野中。
102.在一些实施方式中,发送给所述头戴设备的控制信息是大地坐标系、无人机的机体坐标系或者云台坐标系下的控制信息,以使得所述头戴设备将所述控制信息映射为拍摄设备的相机坐标系下的控制信息,以及根据所述相机坐标系下的控制信息显示所述标记。
103.示例性的,所述方法还包括:将所述无人机的位置和方向、所述无人机与所述云台的相对位置和姿态和/或所述云台和所述拍摄设备之间的相对位置和姿态发送给所述头戴设备,以便所述头戴设备将大地坐标系、无人机的机体坐标系或者云台坐标系下的映射为所述拍摄设备的相机坐标系下的控制信息。
104.示例性的,所述将大地坐标系下的控制信息映射到拍摄设备对应的相机坐标系包括:将大地坐标系下的控制信息映射到无人机机体坐标系(根据无人机的位置和方向);将机体坐标系下的控制信息映射到云台坐标系下(根据无人机与云台的相对位置和姿态,相对位置可以是固定的,姿态可以由无人机与云台上的传感器检测计算得到;将云台坐标系下的控制信息映射到相机坐标系下(根据云台和拍摄设备之间的相对位置和姿态,位置可以是固定的,姿态可以由云台控制量得到)。
105.示例性的,无人机的位置和方向、无人机与云台的相对位置和姿态、云台和拍摄设备之间的相对位置和姿态可以由无人机发送给头戴设备,以便头戴设备进行控制信息的映射。
106.在一些实施方式中,无人机也可以直接给头戴设备传输相机坐标系下的控制信息,这样无人机的位置和方向、无人机与云台的相对位置和姿态、云台和拍摄设备之间的相对位置和姿态可以不用传输。
107.示例性的,所述无人机的控制信息包括无人机姿态控制信息和/或云台姿态控制信息。示例性的,无人机的控制信息用于指示无人机的机体和/或云台的姿态调整的角度和/或角速度。例如,无人机的控制信息用于调整无人机的机体的yaw角度或机体在yaw方向上转动的角速度,或者用于调整无人机的云台的pitch角度或云台在pitch方向上转动的角速度。当然也不限于此。
108.在一些实施方式中,所述无人机的偏航姿态与所述手持控制设备的偏航姿态和/或横滚姿态有关。无人机的偏航姿态可以调整无人机的航向,手持控制设备在yaw方向和/或roll方向调整姿态时可以调整无人机的航向。
109.示例性的,如图5所示,在水平方向上向左或向右转动手持控制设备时,无人机的
飞行方向可以跟随手持控制设备在水平方向上的转动而变化,例如可以与手持控制设备的x轴方向保持一致。头戴设备的显示模块显示的标记向左或向右移动,拍摄装置的方向也相应变化,头戴设备的显示模块显示的所述图像信息也相应变化。
110.示例性的,如图6所示,在竖直方向向左或向右倾斜转动手持控制设备时,无人机的飞行方向可以跟随手持控制设备在竖直方向上的转动而变化。例如,手持控制设备在竖直方向向左倾斜转动时,无人机逆时针旋转,头戴设备的显示模块显示的标记向左移动;手持控制设备在竖直方向向右倾斜转动时,无人机顺时针旋转,头戴设备的显示模块显示的标记向右移动;手持控制设备未在竖直方向倾斜转动时,无人机可以不在水平方向上旋转。
111.示例性的,根据所述手持控制设备的偏航角度和/或横滚角度确定的无人机的控制信息用于使所述标记向左或向右移动。所述标记的移动方向与手持控制设备姿态调整方向的关系,更符合用户的操作习惯,更直观简便。
112.示例性的,如图8和图9所示,用于控制所述无人机和/或所述无人机的云台在偏航方向上向左转动的控制信息,用于使所述标记向左移动,用于控制所述无人机和/或所述无人机的云台在偏航方向上向右转动的控制信息,用于使所述标记向右移动。所述标记的移动方向可以更好的反映无人机和/或所述无人机的云台的姿态调整方向,更符合用户的操作习惯,更直观。
113.在一些实施方式中,所述云台的俯仰姿态与所述手持控制设备的俯仰姿态有关。
114.在一些实施方式中,云台能够在pitch方向转动。所述控制信息包括云台控制信息和无人机控制信息中的至少一个。示例性的,如图10所示,手持控制设备在pitch方向调整姿态时,云台控制信息能够控制无人机的云台带动拍摄装置在pitch方向调整姿态,头戴设备的显示模块显示的标记向上或向下移动,例如在显示模块的垂直方向上偏离中央位置。示例性的,如图8和图9所示,手持控制设备在yaw方向和/或roll方向调整姿态时,无人机带动拍摄设备在yaw方向和/或roll方向调整姿态,头戴设备的显示模块显示的标记向左或向右移动,例如在显示模块的横向方向上偏离中央位置。
115.在另一些实施方式中,云台能够在pitch方向、roll方向、yaw方向上转动。
116.示例性的,云台在pitch方向、roll方向、yaw方向各方向转动时具有对应的限位范围。
117.示例性的,若根据所述姿态信息确定的所述无人机的转动角度处于所述云台的限位范围内,所述控制信息用于控制所述无人机调整所述云台的姿态。
118.示例性的,若所述无人机的控制信息对应的转动角度在云台限位范围内,则所述控制信息包括云台控制信息。示例性的,若所述无人机的控制信息对应的转动角度在云台限位范围内,手持控制设备在pitch方向调整姿态时,无人机的云台带动拍摄设备在pitch方向调整姿态,头戴设备的显示模块显示的标记向上或向下移动;手持控制设备在yaw方向和/或roll方向调整姿态时,无人机的云台带动拍摄设备在yaw方向上调整姿态,头戴设备的显示模块显示的标记向左或向右移动。示例性的,若所述无人机的控制信息对应的转动角度在云台限位范围内,手持控制设备在roll方向调整姿态而在yaw方向未调整姿态时,无人机的云台带动拍摄设备在roll方向调整姿态,头戴设备的显示模块显示的标记可以不向左或向右移动。
119.示例性的,若根据所述姿态信息确定的所述无人机的转动角度处于所述云台的限
位范围外,所述控制信息用于控制所述无人机调整所述云台的姿态和所述无人机的机体的姿态。
120.示例性的,若所述无人机的控制信息对应的转动角度在云台限位范围外,则所述控制信息还包括无人机控制信息。示例性的,所述无人机的控制信息对应的转动角度在云台限位范围外的部分角度可以用于控制无人机调整姿态。例如手持控制设备在yaw方向和/或roll方向调整姿态,使得所述控制信息对应的yaw方向的转动角度超出云台在yaw方向的限位范围,则所述控制信息还控制无人机的机体在yaw方向调整姿态,以及头戴设备的显示模块显示的标记向左或向右移动。
121.示例性的,如图10所示,根据所述手持控制设备的俯仰角度确定的无人机的控制信息用于使所述标记向向上或向下移动。所述标记的移动方向与手持控制设备姿态调整方向的关系,更符合用户的操作习惯,更直观简便。
122.示例性的,如图10所示,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向上转动的控制信息,用于使所述标记向上移动,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向下转动的控制信息,用于使所述标记向下移动。所述标记的移动方向可以更好的反映无人机和/或所述无人机的云台的姿态调整方向,更符合用户的操作习惯,更直观。
123.在一些实施方式中,所述根据所述手持控制设备的姿态信息,确定所述无人机的控制信息,包括:获取所述手持控制设备的参考姿态信息,以及根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息。
124.示例性的,手持控制设备的参考姿态信息对应的姿态也可以成为手持控制设备的初始姿态,或者可以称为手持控制设备的零位。
125.在一些实施方式中,可以根据手持控制设备的当前姿态和手持控制设备的初始姿态的差确定无人机的控制信息,即根据手持控制设备相对于初始姿态的相对姿态确定无人机的控制信息。例如根据手持控制设备的当前转动四元数和初始姿态对应的转动四元数确定相对四元数。相对四元数可以映射到任何想要的旋转系统,例如转化到欧拉角,还可以根据不同需求调整转序等。
126.示例性的,手持控制设备的初始姿态可以为预设的姿态,例如为用户自然手持该手持控制设备时手持控制设备的姿态。或者可以在某一时刻将手持控制设备的当前姿态初始化确定为手持控制设备的初始姿态。
127.在一些实施方式中,所述获取所述手持控制设备的参考姿态信息,包括:将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息。
128.示例性的,进行初始化操作时,将手持控制设备的当前姿态确定为手持控制设备的初始姿态。
129.示例性的,初始化操作可以由用户触发。例如,用户在可以在任意时刻,任意位置触发(如按下手持控制设备上的相应按键)手持控制设备根据手持控制设备当前的姿态确定手持控制设备的参考姿态信息。例如,用户可以按下手持控制设备上的急停按键使无人机停止飞行而保持悬停,在用户再次按下急停按键使无人机能够飞行时,手持控制设备可以根据当前的姿态确定持控制设备的参考姿态信息。
130.示例性的,初始化操作可以在无人机自动起飞完成时自动触发。
131.示例性的,初始化操作也可以由无人机的飞行状态触发。例如在无人机从起飞到预设高度悬停时,可以根据手持控制设备当前的姿态确定持控制设备的参考姿态信息。可以防止手持控制设备的初始姿态未初始化时导致无人机误动作。
132.示例性的,初始化操作也可以由手持控制设备与无人机的通信连接状态触发。例如在手持控制设备与无人机通信连接预设时长时,可以根据手持控制设备当前的姿态确定持控制设备的参考姿态信息。可以防止手持控制设备的初始姿态未初始化时导致无人机误动作。当然也不限于此。
133.示例性的,当所述初始化操作触发时所述手持控制设备的姿态信息满足预设条件时,将所述初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将所述初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。
134.示例性的,在所述手持控制设备的当前姿态处于预设范围内时,使能初始化所述手持控制设备的初始姿态。例如,在手持控制设备当前的yaw角、roll角、pitch角处于对应的预设范围内时,若所述初始化操作触发,则将所述初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。可以避免用户定义了一个异常的姿态作为手持控制设备的零位,即初始姿态,不利于后续通过调整手势控制设备的姿态控制无人机的飞行方向。
135.示例性的,当所述初始化操作触发时所述手持控制设备的姿态信息不满足预设条件时,输出提示信息以提示用户调整所述手持控制设备的姿态。例如,在手持控制设备当前的yaw角、roll角或pitch角未处于对应的预设范围内时,输出提示信息。
136.示例性的,在所述手持控制设备的当前姿态未处于所述预设范围内时,若检测到用户的初始化触发操作,输出提示信息,所述提示信息用于提示当前不能初始化所述手持控制设备的初始姿态和/或提示调整所述手持控制设备的当前姿态。
137.示例性的,所述手持式控制设备的参考俯仰角度、参考横滚角度为预设值,即手持式控制设备的在roll方向上的零位、在pitch方向上的零位为预设值,例如为用户自然手持该手持控制设备时手持控制设备在roll方向上的角度和在pitch方向上的角度。可以防止在无人机从起飞到悬停过程中用户操作手持控制设备在一个异常的姿态,比如在roll方向上偏转90度,使得参考俯仰角度、参考横滚角度过大,用户端平手持式控制设备,即自然手持该手持控制设备时无人机在roll方向上、pitch方向上异常转动。
138.示例性的,所述手持控制设备的当前姿态为所述手持控制设备的参考姿态信息对应的姿态时,所述标记在所述显示模块的显示界面的预设位置显示。举例而言,所述预设位置位于所述显示界面的正中间。显示设备上显示的所述标记可以更准确的指示所述无人机的飞行方向。
139.示例性的,所述手持控制设备的偏航角度和/或横滚角度为零,且所述俯仰角度为零时,所述标记在所述显示模块的显示界面的预设位置显示。
140.在一些实施方式中,可以根据所述手持控制设备的姿态信息确定所述无人机进行姿态调整的目标角速度。可以理解的,在该实施方式中,可以不确定无人机的参考姿态,即无人机的初始姿态,无人机可以根据目标角速度转动而进行姿态调整。
141.示例性的,可以根据所述手持控制设备的偏航角度、俯仰角度、横滚角度中的至少
一项,确定所述无人机在对应方向上进行姿态调整的目标角速度。
142.例如,可以根据手持控制设备的相对于初始姿态的yaw角,如ε确定无人机在yaw方向转动的yaw角速度,即所述无人机的目标偏航角速度,可以称为第一方式。
143.示例性的,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角速度。例如,根据手持控制设备当前的x轴方向与所述初始姿态的x0z平面之间的夹角确定无人机的yaw角速度。当手持控制设备相对于初始状态产生一定的yaw角时,可以以控制无人机在yaw方向转动。例如,无人机在yaw方向转动的yaw角速度为yaw角ε与无人机的yaw角速度增益s的乘积。
144.例如,可以根据手持控制设备的相对于初始姿态的roll角,如θ确定无人机在yaw方向转动的yaw角速度,即所述无人机的目标偏航角速度,可以称为第二方式。
145.示例性的,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。例如,当手持控制设备相对于初始状态产生一定的roll角时,可以控制无人机在yaw方向转动,例如根据roll角θ与无人机的yaw角速度增益s的乘积可以确定无人机在yaw方向转动的yaw角速度。可以理解的,无人机在body坐标系下向前飞行的过程中,存在yaw角速度和机体正方向前进的速度,进而可以实现前进、转弯等飞行。
146.在另一些实施方式中,可以根据所述手持控制设备的姿态信息确定所述无人机进行姿态调整的角度。
147.示例性的,可以根据所述手持控制设备的偏航角度、俯仰角度、横滚角度中的至少一项,确定所述无人机在对应方向上进行姿态调整的角度。
148.例如,可以根据手持控制设备的相对于初始姿态的yaw角,如ε确定无人机在yaw方向转动的yaw角,即所述无人机的目标偏航角度,可以称为第三方式。
149.示例性的,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度。
150.例如,根据手持控制设备当前的x轴方向与所述初始姿态的x0z平面之间的夹角确定无人机在yaw方向转动的yaw角。当手持控制设备相对于初始状态产生一定的yaw角时,可以以控制无人机在yaw方向转动。例如,可以根据所述yaw角ε确定无人机在yaw方向转动的yaw角。
151.例如,可以根据手持控制设备的相对于初始姿态的roll角,如θ确定无人机在yaw方向转动的yaw角,即所述无人机的目标偏航角度,可以称为第四方式。
152.示例性的,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角度。例如,当手持控制设备相对于初始状态产生一定的roll角时,可以控制无人机在yaw方向转动,例如,可以根据roll角θ确定无人机在yaw方向转动的yaw角。
153.可以理解的,无人机在body坐标系下向前飞行的过程中,存在yaw角和机体正方向
前进的速度,进而可以实现前进、转弯等飞行。
154.在其他一些实施方式中,可以根据所述手持控制设备的姿态信息确定所述无人机进行姿态调整的角度和角速度。
155.例如,可以根据手持控制设备的相对于初始姿态的yaw角确定无人机在yaw方向转动的yaw角度,即无人机的目标偏航角度,以及根据手持控制设备的相对于初始姿态的roll角确定在yaw方向转动的yaw角速度,即目标偏航角速度,该种控制方式可以称为第五方式。
156.示例性的,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度;根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。
157.通过定义手持控制设备的姿态信息和无人机的控制信息之间的多种映射方式,可以根据用户的身体结构和用手习惯确定映射方式,使得不同身体结构和用手习惯的人均更加容易上手使用手持控制设备控制无人机。
158.示例性的,第一方式、第三方式比较符合手电筒模式的定义,使用者可以在脑海中想象出真实使用手电筒发出光线指引无人机飞行,但是由于人的手腕在操作手持控制设备转动yaw角的时候左右不是对称的,会有人不适应该方式。第二方式和第四方式,使用者可以通过转动小手臂实现控制无人机转弯,相对省力。第五方式,能够确定无人机的目标偏航角度和目标偏航角速度,可以实现无人机跟随使用者转动身体的动作飞行,在使用者转动身体的同时还可以转动手臂来继续控制无人机在yaw方向上的转动,能够实现大机动飞行。
159.示例性的,根据手持控制设备的相对于初始姿态的yaw角,确定无人机的yaw角。例如,根据手持控制设备当前的x轴方向与所述初始姿态的x0z平面之间的夹角确定无人机的yaw角。可以根据手持控制设备的相对于初始姿态的roll角,确定无人机的yaw角速度。当手持控制设备相对于初始状态产生一定的roll角时,可以控制无人机在yaw方向以所述yaw角速度转动。
160.示例性的,可以根据所述无人机的目标偏航角度和所述无人机的目标偏航角速度调整无人机的姿态。
161.示例性的,所述方法还包括:控制所述无人机在转动所述目标偏航角度之后,以所述目标偏航角速度继续转动。例如,调整无人机在yaw方向转动根据手持控制设备的yaw角确定的无人机的yaw角,之后调整无人机在yaw方向以根据手持控制设备的roll角确定的无人机的yaw角速度继续转动。
162.示例性的,所述方法还包括:控制所述无人机以所述目标偏航角速度至少转动所述目标偏航角度。例如,调整无人机在yaw方向转动根据手持控制设备的yaw角确定的无人机的yaw角,且无人机转动时在yaw方向的角速度为根据手持控制设备的roll角确定的无人机的yaw角速度。
163.在一些实施方式中,所述方法还包括:根据所述目标偏航角度和所述目标偏航角速度在预设时间间隔上的积分,确定所述无人机在偏航方向的控制角度。示例的,控制角度可以通过如下公式计算:
[0164][0165]
示例性的,所述目标偏航角度可以根据下式确定:
[0166]
yaw
rc
(t)-yaw
rc
(0)
[0167]
其中,yaw
rc
(0)表示手持控制设备的初始姿态时的yaw角,即参考偏航角度,t表示以所述初始化操作触发的时间为零点的当前时间,yaw
rc
(t)表示手持控制设备当前的yaw角,即当前的偏航角度。
[0168]
所述目标偏航角速度在预设时间间隔t上的积分可以表示为:
[0169][0170]
其中,τ时刻为0至t时刻之间的时刻,w(τ)表示τ时刻的目标偏航角速度,例如可以根据手持控制设备在τ时刻的横滚角度与参考横滚角度的差值确定,例如根据该差值与无人机的yaw角速度增益s的乘积确定无人机在yaw方向转动的yaw角速度,即目标偏航角速度。
[0171]
示例性的,所述无人机在偏航方向的控制角度可以根据所述目标偏航角度与所述目标偏航角速度在预设时间间隔t上的积分的和确定。
[0172]
示例性的,无人机在初始姿态时的yaw角可以表示为yaw
uav
(0)。
[0173]
在一些实施方式中,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:获取所述无人机的参考姿态信息;根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息以及所述无人机的参考姿态信息,确定所述无人机的控制信息。
[0174]
示例性的,所述无人机的控制信息可以用于控制无人机相对于初始姿态的姿态角度。可以理解的,所述初始姿态为参考姿态信息对应的姿态。在其他示例中,所述无人机的控制信息可以用于控制无人机相对于前一时刻转动的角度。
[0175]
示例性的,所述无人机的当前姿态为所述无人机的参考姿态信息对应的姿态时,所述标记在所述显示模块的显示界面的预设位置显示。举例而言,所述预设位置位于所述显示界面的正中间。显示设备上显示的所述标记可以更准确的指示所述无人机的飞行方向。
[0176]
示例性的,无人机在初始姿态可以为预设的姿态,例如为无人机悬停时的姿态。或者可以在某一时刻将无人机的当前姿态初始化确定为无人机的初始姿态。
[0177]
在一些实施方式中,所述获取所述手持控制设备的参考姿态信息和所述无人机的参考姿态信息,包括:将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。
[0178]
示例性的,初始化操作可以由用户触发,或者可以在无人机起飞完成时进行初始化操作,当然也不限于此。
[0179]
示例性的,当所述初始化操作触发时所述手持控制设备的姿态信息满足预设条件时,将所述初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考
姿态信息,并将所述初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。可以避免用户定义了一个异常的姿态作为手持控制设备的零位,即初始姿态,不利于后续通过调整手势控制设备的姿态控制无人机的飞行方向。示例性的,当所述初始化操作触发时所述手持控制设备的姿态信息不满足预设条件时,输出提示信息以提示用户调整所述手持控制设备的姿态。
[0180]
示例性的,所述无人机的参考俯仰角度、参考横滚角度为预设值,即无人机的在roll方向上的零位、在pitch方向上的零位为预设值,例如为无人机水平悬停时在roll方向上的角度和在pitch方向上的角度。以便无人机保持平稳。
[0181]
示例性的,可以将初始化操作触发时所述手持控制设备的偏航角度作为所述手持控制设备的参考偏航角度,并将初始化操作触发时所述无人机的偏航角度作为所述无人机的参考偏航角度。通过初始化无人机的参考偏航角度,可以确定无人机航向的零位,便于用户通过操作手持控制设备准确调整无人机的航向。
[0182]
在一些实施方式中,所述根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息,包括:根据所述手持控制设备的俯仰角、所述手持控制设备的参考俯仰角,确定所述云台的目标俯仰角。
[0183]
示例性的,手持控制设备在yaw方向和/或roll方向调整姿态时,无人机的机体在在yaw方向调整姿态,头戴设备的显示模块显示的标记向左或向右移动;手持控制设备在pitch方向调整姿态时,无人机的云台在pitch方向调整姿态,头戴设备的显示模块显示的标记向上或向下移动。可以防止无人机的机体在pitch方向大幅度动作引起的风险。
[0184]
示例性的,若根据所述姿态信息确定的所述无人机的在pitch方向转动的角度处于所述云台在pitch方向上的限位范围内,所述控制信息用于控制所述无人机调整所述云台在pitch方向上的姿态。示例性的,若根据所述姿态信息确定的所述无人机的在pitch方向转动的角度超过所述云台在pitch方向上的限位范围内,所述控制信息用于控制所述无人机调整所述云台在pitch方向上的姿态,以及调整所述机体在pitch方向上的姿态。
[0185]
在一些实施方式中,如图3和图11所示,所述手持控制设备包括油门控制部件11。油门控制部件例如包括可操纵的油门,油门的位置,或可称为键程值,或者可称为油门杆量,能够控制无人机在机体坐标系下的速度大小(标量)。如图11所示,向图示的方向按下油门,可以控制无人机沿着飞行方向运动。
[0186]
示例性的,所述方法还包括:获取油门杆量,所述油门杆量是基于对所述油门控制部件的操作生成的;根据所述油门杆量控制所述无人机朝向所述标记指示的飞行方向飞行。
[0187]
在一些实施方式中,将油门的键程值映射到[0,1]之间。假设无人机的最大速度为v
max
。无人机在速度方向上的速度大小为键程值映射后的值与无人机的最大速度为v
max
的乘积。
[0188]
示例性的,当所述油门杆量为最小油门杆量时,所述无人机的位置保持不变。示例性的,当油门全部松开时,键程值映射后的值为0,对应的油门杆量为最小油门杆量,无人机停止在水平方向和/或竖直方向上的移动,例如保持悬停或者根据手持控制设备的姿态信息原地转动,调整飞行方向。可以理解的,可以不需要手动控制油门杆量保持无人机悬停。
[0189]
随着油门逐渐加大,键程值映射后的值大于0时,无人机开始向根据手持控制设备
的姿态信息确定的飞行方向逐渐加速,例如加速至键程值映射后的值与无人机的最大速度为v
max
的乘积。
[0190]
示例性的,当所述油门杆量为最大油门杆量时,所述无人机以预设飞行速度朝向所述标记指示的飞行方向飞行。当油门按到底时,键程值映射后的值为1,无人机以全速,如以最大速度v
max
向所述标记指示的飞行方向飞行。
[0191]
在另一些实施方式中,将油门的键程值映射到[-1,1]之间,当油门维持在中间位置的时候,键程值映射后的值为0,无人机停止在水平方向和/或竖直方向上的移动,例如保持悬停或原地自转;油门从中间位置松开时,键程值映射后的值小于0,无人机可以在竖直方向上向下运动;油门从中间位置按下时,键程值映射后的值大于0,无人机可以在竖直方向上向上运动。这种方式需要手动保持无人机悬停。
[0192]
示例性的,可以通过对油门的键程值进行滤波去除键程值的噪声和振动,可以采用一阶滤波的方式对油门的键程值进行滤波。
[0193]
在一些实施方式中,当所述油门杆量从最小油门杆量到最大油门杆量均匀变化时,所述无人机的飞行速度的增量逐渐变大。
[0194]
示例性的,通过预设的指数曲线(exponential)对油门的键程值进行处理,可以使得前段油门(如油门在中间位置到完全松开之间)比较平滑,做到平滑加速,后段油门(如油门在中间位置到完全按下之间)可以使无人机有一个更快的响应。提高油门操控的手感。
[0195]
在一些实施方式中,无人机的运动可以分解成yaw方向上转动的角度、机体正方向的水平速度的大小|v|和/或垂直方向上的速度。当手持控制设备的坐标系的x轴方向,即“手电筒”发出的光线在水平方向上发生变化时(沿大地坐标系z轴旋转),则无人机的运动可以分解成yaw方向上转动的角度和机体正方向的水平速度|v|。当手持控制设备的x轴方向,即“手电筒”发出的光线在垂直方向上发生变化时(沿大地坐标系y轴旋转),无人机产生垂直方向上的速度。
[0196]
示例性的,可以根据所述手持控制设备的机体坐标系上的预设方向,如x轴方向,确定所述无人机的目标速度方向。当手持控制设备姿态改变,如用户转动手持控制设备的过程中,x轴方向也会跟着一起转动,跟随x轴方向可以分解得到手持控制设备的机身在水平方向的速度、垂直方向上的速度、yaw角、yaw角速度中的至少一种。所以,手持控制设备的姿态信息可以包括手持控制设备的机身在水平方向上的速度、垂直方向上的速度、yaw角、yaw角速度中的至少一种。例如,根据手持控制设备在水平方向上的yaw角、yaw角速度可以确定用于控制无人机在水平方向上转动的控制信息。
[0197]
示例性的,将手持控制设备当前的x轴方向映射到所述初始姿态的x0z平面上,得到一向量,根据该向量可以确定无人机在body坐标系下的运动方向,该运动方向可以称为速度指令向量的方向,简称速度指令方向。在一些实施方式中,若所述手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏差大于预设阈值,所述标记用于指示所述无人机垂直升降。
[0198]
示例性的,若所述手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏差大于预设阈值,则根据所述姿态信息确定的无人机的控制信息用于控制无人机上升或下降,例如控制电机的转速增加使无人机的升力增加或者控制电机的转速降低使无人机的升力降低。以防止无人机在pitch方向大幅度转动引起的风险。
[0199]
示例性的,头戴设备的显示模块的正上方和正下方分别有向上的图标和向下的图标,当手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏差大于预设阈值时,显示模块显示的标记可以和所述向上的图标或向下的图标重合,重合后向上的图标或向下的图标的颜色会变化,提示用户当前无人机可以垂直升降。用户操作油门控制部件,如拉动油门杆可以控制无人机垂直升降。
[0200]
在一些实施方式中,所述方法还包括:在所述无人机起飞到离地预设高度时,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0201]
示例性的,无人机自动垂直起飞到离地1.2米的空中悬停,之后手持控制设备可以进入手电筒模式。可以防止在用户未正确手持该手持控制设备,或未进行初始化操作时手持控制设备的姿态引起无人机误动作。
[0202]
在一些实施方式中,所述方法还包括:当所述无人机处于自动降落状态时,停止根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0203]
示例性的,当无人机的电量低于预设电量阈值时,无人机会触发低电量自动降落。
[0204]
示例性的,无人机在空中任意位置时,用户双击手持控制设备上的相应按键,也可以触发自动降落功能。
[0205]
示例性的,当所述无人机处于自动降落状态时,手持控制设备锁定,即手持控制设备的姿态变化不引起无人机姿态的变化。可以提高无人机自动降落的安全性。自动降落的功能操作简单,降低了手电筒模式时无人机降落的难度,提高了无人机安全落地的可靠性。
[0206]
在一些实施方式中,所述方法还包括:当所述无人机处于自动降落状态时,根据用户对所述手持控制设备的解锁操作,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0207]
示例性的,当所述无人机处于自动降落状态时,若获取到的油门杆量大于预设油门杆量阈值,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0208]
示例性的,无人机降落时,可以通过将油门压下,例如按压至中间位置或从中间位置继续按下时,手持控制设备解锁,接管无人机的控制,即手持控制设备的姿态变化可以映射为无人机姿态的变化,开始控制无人机的运动。例如手持控制设备在roll方向和/或yaw方向的姿态调整可以控制无人机在yaw方向转动,手持控制设备在pitch方向转动可以控制无人机的机体和/或无人机的云台俯仰。
[0209]
示例性的,按压油门可以减缓无人机下降的速度,例如当油门拉到底时可以使无人机垂向悬停。示例性的,当油门松开回到中间位置或从中间位置松开时,手持控制设备锁定,无人机自主降落。
[0210]
示例性的,无人机降落时,无人机会垂直匀速下降,在离地0.3米的地方悬停并触发二段降落,等待用户双击按键确认降落。在降落的过程中,可以通过操作手持控制设备,例如可以单击手持控制设备上的相应按键取消降落。
[0211]
在一些实施方式中,无人机在降落时,可以通过手持控制设备调整无人机的飞行方向各/或下降速度,以保证降落的安全性,例如降落在没有障碍物的地方。
[0212]
示例性的,可以根据手持控制设备的相对于初始姿态的pitch角确定无人机在垂直方向上的速度。示例性的,根据手持控制设备当前的x轴方向的单位向量投影到大地坐标系的z轴上的分量,将该分量乘以油门控制的无人机速度v,得到无人机在垂直方向上的目
标速度。
[0213]
示例性的,如图12所示,根据手持控制设备的姿态信息控制无人机飞行时,根据手持控制设备的姿态确定的无人机在垂直方向上的目标速度范围可以为[﹣v
max
,v
max
]之间;无人机自动降落时,若手持控制设备解锁,能够控制无人机的运动,则根据手持控制设备的姿态确定的无人机在垂直方向上的目标速度范围可以为[0,v
max
]之间。可以保证无人机可以正常的下降,还可以利用手持控制设备控制无人机的落点。
[0214]
示例性的,在无人机进入降落时,强制将无人机的下降速度置为预设值vlan,根据手持控制设备的姿态映射到垂直方向上的目标速度与下降速度vlan相抵的时候,无人机会停止下降。
[0215]
在一些实施方式中,所述方法还包括:当所述无人机处于自动降落状态时,控制所述云台在俯仰方向上向下转动预设角度。从而拍摄设备拍摄得到的图像信息和头戴设备的显示模块显示的图像信息可以体现无人机下方的景物,便于用户判断无人机落点是否安全,以及在落点有障碍物时通过手持控制设备调整无人机的飞行方向各/或下降速度,以保证降落的安全性,例如降落在没有障碍物的地方。
[0216]
在一些实施方式中,所述头戴设备可以获取手持控制设备的姿态信息,以及根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0217]
示例性的,手持控制设备的姿态可以映射为所述标记显示位置的调整。例如,在水平方向上向左或向右转动手持控制设备,或者在竖直方向向左或向右倾斜转动手持控制设备时,头戴设备的显示模块显示的标记向左或向右移动;手持控制设备在pitch方向调整姿态时,头戴设备的显示模块显示的标记向上或向下移动。
[0218]
示例性的,手持控制设备的姿态调整幅度越大,则所述显示模块显示的标记偏离预设位置的距离越大,同时无人机的控制信息指示的无人机的姿态变化幅度也越大,因此显示模块显示的标记可以体现无人机的姿态变化幅度,便于向用户反馈无人机的飞行方向。
[0219]
在一些实施方式中,可以根据所述手持控制设备的姿态信息、所述显示模块的显示参数计算所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
[0220]
示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。因此可以与不同规格的显示模块适配,更准确的指示所述无人机的飞行方向。
[0221]
在一些实施方式中,所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示的标记为飞行指示标记。
[0222]
所述方法还可以包括:当所述手持控制设备处于头戴设备操作模式时,将所述手持控制设备的姿态信息发送给所述头戴设备,以使得所述头戴设备根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示操作标记,所述操作标记用于操作所述显示模块上的虚拟控制部件。
[0223]
在一些实施方式中,当所述手持控制设备处于头戴设备操作模式时,用户可以通过调整手持控制设备的姿态调整所述操作标记在所述显示模块上的位置,实现所述显示模块的界面交互。例如,可以用于选择菜单。例如用户可以使用单手手持控制设备实现显示模块的菜单选择。可以理解的,手持控制设备的姿态可以映射为操作标记显示位置的调整。例
如,在水平方向上向左或向右转动手持控制设备,或者在竖直方向向左或向右倾斜转动手持控制设备时,头戴设备的显示模块显示的操作标记向左或向右移动;手持控制设备在pitch方向调整姿态时,头戴设备的显示模块显示的操作标记向上或向下移动。示例性的,在进行设置或者需要菜单切换的时候,先将无人机一键刹车悬停,再通过调整手持控制设备的姿态控制操作标记在显示模块上的显示位置,通过操作标记实现在显示模块界面中下拉菜单、选中虚拟控制部件等操作。
[0224]
示例性的,头戴设备屏幕上显示相应菜单的按钮,当该操作标记移动到该按钮上时,该按钮会变颜色表示选中,此时按下手持控制设备的相应按键,如模式键表示确认,双击相应按键,如模式键表示退出选中。当菜单显示出来后,同理操作,用户可以通过调整手持控制设备的姿态控制所述操作标记和相应按键任意操纵菜单栏的选项设置。
[0225]
在一些实施方式中,所述获取手持控制设备的姿态信息,包括:在所述手持控制设备的俯仰角度增加至第一阈值或减小至第二阈值时,记录所述手持控制设备的偏航角度为锁定偏航角度,所述第一阈值大于所述第二阈值。
[0226]
在所述手持控制设备的俯仰角度大于所述第一阈值或小于所述第二阈值时,将所述锁定偏航角度作为所述手持控制设备当前的偏航角度,以及根据所述手持控制设备的机体坐标系上的预设方向与第二预设平面之间的夹角确定所述手持控制设备的横滚角度,所述第二预设平面与所述手持控制设备处于所述锁定偏航角度时的所述预设方向平行,且所述第二预设平面与大地平面垂直。
[0227]
示例性的,当手持控制设备的pitch角度过大或过小的时候,由于欧拉角的性质所限制,手持控制设备的roll角和yaw角此时已经耦合。示例性的,如果手持控制设备有一个很大的pitch角,此时再给手持控制设备以一定的roll角,此时yaw角也会有角度输出,容易导致无人机的控制混乱。通过在手持控制设备的pitch角度大于或小于对应的阈值的时候,记录下此时的yaw角,称为锁定yaw角。之后在继续抬升或降低pitch角度时,锁定yaw角不变。此时手持控制设备的输出roll角,使用手持控制设备的x轴相对于锁定yaw角度的垂直平面(平面垂直于大地x0y平面)的夹角来代替。
[0228]
请结合前述实施方式参阅图13,手持控制设备能够实现以下功能的至少一种:起飞、进入、刹车、返航、降落、悬停、避障,分小点、apas避障绕行、任意角度初始化。
[0229]
无人机在停桨时可以通过双击加解锁键控制无人机起桨。之后可以通过长按加解锁键控制无人机的起飞。
[0230]
自动起飞功能:例如,将无人机放在平地上后,打开无人机电池,连上手持控制设备,先单击手持控制设备加解锁键,无人机起桨,后长按手持控制设备加解锁键,无人机自动垂直起飞到离地1.2米的空中悬停,例如可以自动进入手电筒飞行模式。通过在自动起飞后进入手电筒飞行模式,可以防止手持控制设备位置未准备好时无人机误动作。
[0231]
自动降落功能:无人机在空中任意位置时,用户通过长按加解锁键,可以触发自动降落功能。进入自动降落后,无人机会垂直匀速下降,在离地0.3米的地方悬停并触发二段降落,等待用户通过长按加解锁键确认降落。在降落的过程中,也可以单击大圆键取消降落。自动降落的功能操作简单,降低了手电筒飞行时手动降落的难度,提高了无人机安全落地的可靠性。
[0232]
自动返航功能,无人机在空中任意位置时,用户长按大圆键,如刹车键,可以触发
自动返航功能。进入自动返航后,无人机先上升到返航高度再定速巡航返回到home点。在返航的过程中,也可以单击大圆键取消返航。若无人机的电量不足,在手电筒模式的飞行中,也会触发低电量自动返航,保证无人机能安全返回。自动返航的功能操作简单,降低了手电筒飞行时手动返航的难度,提高了无人机安全返回的可靠性。
[0233]
刹车悬停功能:手电筒模式的刹车功能可通过两种操作实现:1)在正常的飞行中松开油门杆,无人机正常刹车,2)单击大圆键,无人机紧急刹车。
[0234]
正常飞行功能:无人机连上手持控制设备后默认进入手电筒模式,自动起飞后,用户通过操纵手持控制设备可控制无人机正常飞行。其中,操纵手持控制设备滚转姿态和偏航姿态,可控制无人机偏转机头方向,操纵手持控制设备的俯仰姿态和油门可控制无人机上下前后运动,操纵手持控制设备的俯仰姿态还可以控制云台上下运动,保证用户在头戴设备里的视角符合手持控制设备指向的方向。
[0235]
避障飞行功能:在手电筒模式的正常飞行中,会感知环境的障碍物,从而对飞行速度做规划减速,使得无人机和障碍物保持安全距离,防止无人机撞击到障碍物和人群,保证无人机和人群的安全。
[0236]
apas避障绕行功能:在手电筒模式的飞行中,用户若选择打开apas绕障飞行功能,无人机在遇到障碍物时会自动规划绕行路线,躲避障碍物自由飞行,减小了用户对飞行环境安全新判断的难度,增加了用户在复杂环境里飞行的乐趣。
[0237]
任意位置初始化姿态功能:手持控制设备没有固定的回中位置,可供用户在空间的任意位置,以任意姿态使用,因此设计了任意位置初始化手持控制设备姿态功能。用户在任意时刻,任意位置,任意姿态单击大圆键,手持控制设备的姿态会重置回中,同时无人机也会刹车回中,降低了用户使用手持控制设备的操作难度,优化了用户手电筒模式的飞行体验。
[0238]
示例性的,通过模式键可以切换至追头模式:如果头戴设备中有姿态传感器(imu/陀螺仪),可以感应到人头部的变化。进入追头模式之后,无人机云台将跟随头戴设备的姿态。
[0239]
在一些实施方式中,无人机还能够跟随头戴设备的姿态。例如,头戴设备中有姿态传感器(imu/陀螺仪),可以感应到人头部的变化。进入追头模式之后为无人机和/或云台将跟随头戴设备的姿态。
[0240]
示例性的,通过头戴设备的姿态变化控制云台的姿态调整,例如头戴设备的x轴控制云台的俯仰角和偏航角(与手持控制设备定义相同)。可以通过将云台控制和无人机飞行解耦,头戴设备控制云台朝向,手持控制设备控制无人机的运动方向,可以实现例如环绕拍摄等等功能。
[0241]
在一些实施方式中,手电筒模式下,头戴设备上特有的交互包括以下:home点显示:无人机在起飞时会记录home点,当无人机偏离home点时,头戴设备会显示home点指向引导用户正确返航。
[0242]
在一些实施方式中,具有智能提示功能:当无人机执行自动起桨,自动起飞,自动返航,自动降落时,无人机是不可人为控制的,此时头戴设备会主动提示无人机在智能功能中,防止用户因无法控制无人机而感到困惑并引导用户正确使用按键操纵无人机。
[0243]
在一些实施方式中,当无人机出现动力不足,指南针需要校准,无人机温度过高,
电机堵转等异常状态时,头戴设备会标红提示用户,保证飞行安全。
[0244]
在一些实施方式中,可以提供刹车锁定及解锁提示:在飞行过程中,用户可以按刹车键使得无人机快速刹车悬停,同时锁定手持控制设备杆量,无法控制无人机,此时头戴设备会提示用户刹车锁定。若用户想要再次控制无人机时,需把手持控制设备端平,再次点击刹车键解锁手持控制设备,若解锁失败,头戴设备会提示用户将手持控制设备端平。以上的刹车锁定及解锁交互,保证了多人体验同一手持控制设备飞行时的安全、可靠和一致性。
[0245]
在一些实施方式中,可以提供观众模式:无人机在手电筒模式里可以同时连接两个头戴设备,用手持控制设备控制飞行的为主头戴设备,另一个则为从头戴设备,无法控制无人机,主要用于充当观众视角的角色,增加多人体验飞行的趣味性。
[0246]
示例性的,无人机在手电筒模式里可以同时连接两个头戴设备,两个头戴设备各自对应一个手持控制设备,在其中一个手持控制设备锁定时,另一个手持控制设备可以解锁,来对无人机进行操控。
[0247]
本技术实施例提供的无人机的控制方法,通过获取手持控制设备的姿态信息,根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。使得用户可以通过调整手持控制设备的姿态来控制无人机,符合人类直觉。通过显示标记指示所述无人机的飞行方向,能够带给用户更直观的操控体验,使得飞行操纵更加容易和安全。
[0248]
可以将手持控制设备的转动更加直观的转化为无人机的姿态控制,达到人-手持控制设备-无人机三方交互的目的,在一些实施方式中用户仅用单手即可操作无人机。能够以符合人类直觉的方式将手腕转动等肢体动作转化为无人机姿态的调整指令。
[0249]
请结合上述实施例参阅图14,图14是本技术实施例提供的手持控制设备610的示意性框图。
[0250]
其中手持控制设备610例如包括体感遥控器,当然也不限于此。
[0251]
该手持控制设备610包括姿态传感器611和通信模块612。
[0252]
其中,姿态传感器611用于获取所述手持控制设备610的姿态信息;通信模块612用于将所述手持控制设备610的姿态信息发送给无人机,以使得所述无人机根据所述手持控制设备610的姿态信息,确定所述无人机的控制信息,并将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0253]
示例性的,无人机可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0254]
在一些实施方式中,所述手持控制设备包括油门控制部件。
[0255]
如图14所示,所述手持控制设备还包括:一个或多个处理器613,单独地或共同地工作,用于:获取油门杆量,所述油门杆量是基于对所述油门控制部件的操作生成的。
[0256]
示例性的,所述通信模块还用于将所述油门杆量发送给所述无人机,以使所述无人机根据所述油门杆量控制所述无人机朝向所述标记指示的飞行方向飞行。
[0257]
示例性的,当所述油门杆量为最小油门杆量时,所述无人机的位置保持不变。
[0258]
示例性的,当所述油门杆量为最大油门杆量时,所述无人机以预设飞行速度朝向所述标记指示的飞行方向飞行。
[0259]
示例性的,当所述油门杆量从最小油门杆量到最大油门杆量均匀变化时,所述无人机的飞行速度的增量逐渐变大。
[0260]
示例性的,所述无人机包括拍摄设备,所述拍摄设备通过云台安装于所述无人机;
[0261]
所述无人机的控制信息包括无人机姿态控制信息和/或云台姿态控制信息。
[0262]
示例性的,所述手持控制设备的偏航姿态和/或横滚姿态用于确定所述无人机的偏航姿态;和/或
[0263]
所述手持控制设备的俯仰姿态用于确定所述云台的俯仰姿态。
[0264]
示例性的,根据所述手持控制设备的偏航角度和/或横滚角度确定的无人机的控制信息用于使所述标记向左或向右移动;和/或
[0265]
根据所述手持控制设备的俯仰角度确定的无人机的控制信息用于使所述标记向向上或向下移动。
[0266]
示例性的,用于控制所述无人机和/或所述无人机的云台在偏航方向上向左转动的控制信息,用于使所述标记向左移动,用于控制所述无人机和/或所述无人机的云台在偏航方向上向右转动的控制信息,用于使所述标记向右移动。
[0267]
示例性的,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向上转动的控制信息,用于使所述标记向上移动,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向下转动的控制信息,用于使所述标记向下移动。
[0268]
示例性的,所述无人机的控制信息根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息确定。
[0269]
示例性的,所述无人机的控制信息包括所述无人机的目标偏航角速度;
[0270]
所述无人机的目标偏航角速度根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度确定,或者根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度确定。
[0271]
示例性的,所述无人机的控制信息包括目标偏航角度:所述目标偏航角度根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度确定,或者根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度确定。
[0272]
示例性的,所述无人机的控制信息包括目标偏航角度和目标偏航角速度,所述目标偏航角度根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度确定的所述无人机的目标偏航角度;所述无人机的目标偏航角速度根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度确定。
[0273]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:
[0274]
控制所述无人机在转动所述目标偏航角度之后,以所述目标偏航角速度继续转动。
[0275]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:
[0276]
控制所述无人机以所述目标偏航角速度至少转动所述目标偏航角度。
[0277]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:
[0278]
根据所述目标偏航角度和所述目标偏航角速度在预设时间间隔上的积分,确定所述无人机在偏航方向的控制角度。
[0279]
示例性的,所述无人机包括拍摄设备,所述拍摄设备通过云台安装于所述无人机;
[0280]
所述无人机的控制信息,包括:
[0281]
根据所述手持控制设备的俯仰角、所述手持控制设备的参考俯仰角确定的所述云台的目标俯仰角。
[0282]
示例性的,若所述手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏差大于预设阈值,所述标记用于指示所述无人机垂直升降。
[0283]
示例性的,所述处理器还用于将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息。
[0284]
示例性的,所述处理器将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息时,用于:
[0285]
将初始化操作触发时所述手持控制设备的偏航角度作为所述手持控制设备的参考偏航角度;
[0286]
所述手持式控制设备的参考俯仰角度、参考横滚角度为预设值。
[0287]
示例性的,所述处理器将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息时,用于:
[0288]
当所述初始化操作触发时所述手持控制设备的姿态信息满足预设条件时,将所述初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息;
[0289]
否则,输出提示信息以提示用户调整所述手持控制设备的姿态。
[0290]
示例性的,所述处理器还用于:
[0291]
在所述无人机起飞到离地预设高度时,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0292]
示例性的,所述处理器还用于:
[0293]
当所述无人机处于自动降落状态时,若获取到的油门杆量大于预设油门杆量阈值,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0294]
示例性的,所述标记为飞行指示标记,所述通信模块还用于:
[0295]
当所述手持控制设备处于头戴设备操作模式时,将所述手持控制设备的姿态信息发送给所述头戴设备,以使得所述头戴设备根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示操作标记,所述操作标记用于操作所述显示模块上的虚拟控制部件。
[0296]
本技术实施例提供的手持控制设备的具体原理和实现方式均与前述实施例的无人机的控制方法类似,此处不再赘述。
[0297]
请结合上述实施例参阅图15,图15是本技术实施例提供的手持控制设备620的示意性框图。
[0298]
其中手持控制设备620例如包括体感遥控器,当然也不限于此。
[0299]
该手持控制设备620包括姿态传感器621、一个或多个处理器622以及通信模块623。
[0300]
其中,姿态传感器621用于获取所述手持控制设备620的姿态信息;一个或多个处理器622,单独地或共同地工作,用于根据所述手持控制设备620的姿态信息,确定所述无人
机的控制信息;通信模块623用于将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0301]
示例性的,手持控制设备获取自身的姿态信息,根据姿态信息确定所述无人机的控制信息,将所述无人机的控制信息发送给无人机以使无人机根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。示例性的,手持控制设备确定的无人机的控制信息可以直接发给无人机,或者为可以通过头戴设备发给无人机,传输更可靠。
[0302]
示例性的,所述手持控制设备包括油门控制部件,所述处理器还用于:
[0303]
获取油门杆量,所述油门杆量是基于对所述油门控制部件的操作生成的;
[0304]
所述通信模块还用于将所述油门杆量发送给所述无人机,以使所述无人机根据所述油门杆量控制所述无人机朝向所述标记指示的飞行方向飞行。
[0305]
示例性的,当所述油门杆量为最小油门杆量时,所述无人机的位置保持不变。
[0306]
示例性的,当所述油门杆量为最大油门杆量时,所述无人机以预设飞行速度朝向所述标记指示的飞行方向飞行。
[0307]
示例性的,当所述油门杆量从最小油门杆量到最大油门杆量均匀变化时,所述无人机的飞行速度的增量逐渐变大。
[0308]
示例性的,所述无人机包括拍摄设备,所述拍摄设备通过云台安装于所述无人机;
[0309]
所述无人机的控制信息包括无人机姿态控制信息和/或云台姿态控制信息。
[0310]
示例性的,所述手持控制设备的偏航姿态和/或横滚姿态用于确定所述无人机的偏航姿态;和/或
[0311]
所述手持控制设备的俯仰姿态用于确定所述云台的俯仰姿态。
[0312]
示例性的,根据所述手持控制设备的偏航角度和/或横滚角度确定的无人机的控制信息用于使所述标记向左或向右移动;和/或
[0313]
根据所述手持控制设备的俯仰角度确定的无人机的控制信息用于使所述标记向向上或向下移动。
[0314]
示例性的,用于控制所述无人机和/或所述无人机的云台在偏航方向上向左转动的控制信息,用于使所述标记向左移动,用于控制所述无人机和/或所述无人机的云台在偏航方向上向右转动的控制信息,用于使所述标记向右移动。
[0315]
示例性的,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向上转动的控制信息,用于使所述标记向上移动,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向下转动的控制信息,用于使所述标记向下移动。
[0316]
示例性的,所述处理器根据所述手持控制设备的姿态信息,确定所述无人机的控制信息时,用于:
[0317]
获取所述手持控制设备的参考姿态信息;
[0318]
根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息。
[0319]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的
参考姿态信息,确定所述无人机的控制信息时,用于:
[0320]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角速度;或者
[0321]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。
[0322]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0323]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度;或者
[0324]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角度。
[0325]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0326]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度;
[0327]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。
[0328]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:控制所述无人机在转动所述目标偏航角度之后,以所述目标偏航角速度继续转动。
[0329]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:控制所述无人机以所述目标偏航角速度至少转动所述目标偏航角度。
[0330]
示例性的,所述无人机的目标偏航角度和所述无人机的目标偏航角速度用于:根据所述目标偏航角度和所述目标偏航角速度在预设时间间隔上的积分,确定所述无人机在偏航方向的控制角度。
[0331]
示例性的,所述无人机包括拍摄设备,所述拍摄设备通过云台安装于所述无人机;
[0332]
所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0333]
根据所述手持控制设备的俯仰角、所述手持控制设备的参考俯仰角,确定所述云台的目标俯仰角。
[0334]
示例性的,若所述手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏差大于预设阈值,所述标记用于指示所述无人机垂直升降。
[0335]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0336]
获取所述无人机的参考姿态信息;
[0337]
根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息以及所述无人机的参考姿态信息,确定所述无人机的控制信息。
[0338]
示例性的,所述处理器获取所述手持控制设备的参考姿态信息和所述无人机的参考姿态信息时,用于:
[0339]
将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参
考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。
[0340]
示例性的,所述处理器获取所述手持控制设备的参考姿态信息和所述无人机的参考姿态信息时,用于:
[0341]
将初始化操作触发时所述手持控制设备的偏航角度作为所述手持控制设备的参考偏航角度,并将初始化操作触发时所述无人机的偏航角度作为所述无人机的参考偏航角度;
[0342]
所述手持式控制设备的参考俯仰角度、参考横滚角度为预设值。
[0343]
示例性的,所述处理器将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息时,用于:
[0344]
当所述初始化操作触发时所述手持控制设备的姿态信息满足预设条件时,将所述初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将所述初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息;
[0345]
否则,输出提示信息以提示用户调整所述手持控制设备的姿态。
[0346]
示例性的,所述处理器还用于:
[0347]
在所述无人机起飞到离地预设高度时,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0348]
示例性的,所述处理器还用于:
[0349]
当所述无人机处于自动降落状态时,控制所述无人机的云台在俯仰方向上向下转动预设角度。
[0350]
示例性的,所述处理器还用于:
[0351]
当所述无人机处于自动降落状态时,若获取到的油门杆量大于预设油门杆量阈值,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0352]
示例性的,所述标记为飞行指示标记,所述通信模块还用于:
[0353]
当所述手持控制设备处于头戴设备操作模式时,将所述手持控制设备的姿态信息发送给所述头戴设备,以使得所述头戴设备根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示操作标记,所述操作标记用于操作所述显示模块上的虚拟控制部件。
[0354]
本技术实施例提供的手持控制设备的具体原理和实现方式均与前述实施例的无人机的控制方法类似,此处不再赘述。
[0355]
本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述实施例提供的无人机的控制方法的步骤。
[0356]
其中,所述计算机可读存储介质可以是前述任一实施例所述的手持控制设备的内部存储单元,例如所述手持控制设备的硬盘或内存。所述计算机可读存储介质也可以是所述手持控制设备的外部存储设备,例如所述手持控制设备上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。
[0357]
请参阅图16,图16是本技术实施例提供的无人机700的示意性框图。示例性的,无人机700可以为旋翼型无人机,例如四旋翼无人机、六旋翼无人机、八旋翼无人机,也可以是
固定翼无人机。
[0358]
该无人机700包括第一通信模块701、一个或多个处理器702,以及第二通信模块703。
[0359]
其中,第一通信模块701用于获取手持控制设备的姿态信息;一个或多个处理器702,单独地或共同地工作,用于根据所述手持控制设备的姿态信息,确定所述无人机700的控制信息;第二通信模块703,用于将所述无人机700的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机700的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机700的飞行方向。
[0360]
可以理解的。第一通信模块701和第二通信模块703可以为不同的通信模块,也可以为同一个通信模块,例如可以为一体设置的通信模块。
[0361]
示例性的,无人机可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0362]
示例性的,所述第一通信模块还用于:
[0363]
获取所述手持控制设备的油门杆量,所述油门杆量是基于对所述手持控制设备的油门控制部件的操作生成的;
[0364]
所述处理器还用于根据所述油门杆量控制所述无人机朝向所述标记指示的飞行方向飞行。
[0365]
示例性的,当所述油门杆量为最小油门杆量时,所述无人机的位置保持不变。
[0366]
示例性的,当所述油门杆量为最大油门杆量时,所述无人机以预设飞行速度朝向所述标记指示的飞行方向飞行。
[0367]
示例性的,当所述油门杆量从最小油门杆量到最大油门杆量均匀变化时,所述无人机的飞行速度的增量逐渐变大。
[0368]
示例性的,所述无人机包括拍摄设备,所述第二通信模块还用于:
[0369]
将所述拍摄设备拍摄得到的图像信息发送给所述头戴设备,以使的所述头戴设备的显示模块叠加显示所述图像信息和所述标记。
[0370]
示例性的,所述拍摄设备通过云台安装于所述无人机;
[0371]
所述无人机的控制信息包括无人机姿态控制信息和/或云台姿态控制信息。
[0372]
示例性的,所述无人机的偏航姿态与所述手持控制设备的偏航姿态和/或横滚姿态有关;和/或
[0373]
所述云台的俯仰姿态与所述手持控制设备的俯仰姿态有关。
[0374]
示例性的,根据所述手持控制设备的偏航角度和/或横滚角度确定的无人机的控制信息用于使所述标记向左或向右移动;和/或
[0375]
根据所述手持控制设备的俯仰角度确定的无人机的控制信息用于使所述标记向向上或向下移动。
[0376]
示例性的,用于控制所述无人机和/或所述无人机的云台在偏航方向上向左转动的控制信息,用于使所述标记向左移动,用于控制所述无人机和/或所述无人机的云台在偏航方向上向右转动的控制信息,用于使所述标记向右移动。
[0377]
示例性的,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向上转动的控制信息,用于使所述标记向上移动,用于控制所述无人机和/或所述无人机的云台在俯仰方向上向下转动的控制信息,用于使所述标记向下移动。
[0378]
示例性的,所述处理器根据所述手持控制设备的姿态信息,确定所述无人机的控制信息时,用于:
[0379]
根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息。
[0380]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0381]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角速度;或者
[0382]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。
[0383]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0384]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度;或者
[0385]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角度。
[0386]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0387]
根据所述手持控制设备的偏航角度、所述手持控制设备的参考偏航角度,确定所述无人机的目标偏航角度;
[0388]
根据所述手持控制设备的横滚角度、所述手持控制设备的参考横滚角度,确定所述无人机的目标偏航角速度。
[0389]
示例性的,所述处理器还用于:
[0390]
控制所述无人机在转动所述目标偏航角度之后,以所述目标偏航角速度继续转动。
[0391]
示例性的,所述处理器还用于:
[0392]
控制所述无人机以所述目标偏航角速度至少转动所述目标偏航角度。
[0393]
示例性的,所述处理器还用于:
[0394]
根据所述目标偏航角度和所述目标偏航角速度在预设时间间隔上的积分,确定所述无人机在偏航方向的控制角度。
[0395]
示例性的,所述无人机包括拍摄设备,所述拍摄设备通过云台安装于所述无人机;
[0396]
所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0397]
根据所述手持控制设备的俯仰角、所述手持控制设备的参考俯仰角,确定所述云台的目标俯仰角。
[0398]
示例性的,若所述手持控制设备的俯仰角与所述手持控制设备的参考俯仰角的偏
差大于预设阈值,所述标记用于指示所述无人机垂直升降。
[0399]
示例性的,所述处理器根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息,确定所述无人机的控制信息时,用于:
[0400]
根据所述手持控制设备的姿态信息和所述手持控制设备的参考姿态信息以及所述无人机的参考姿态信息,确定所述无人机的控制信息。
[0401]
示例性的,所述处理器还用于:
[0402]
将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息。
[0403]
示例性的,所述处理器将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息时,用于:
[0404]
将初始化操作触发时所述手持控制设备的偏航角度作为所述手持控制设备的参考偏航角度,并将初始化操作触发时所述无人机的偏航角度作为所述无人机的参考偏航角度;
[0405]
所述手持式控制设备的参考俯仰角度、参考横滚角度为预设值。
[0406]
示例性的,所述处理器将初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息时,用于:
[0407]
当所述初始化操作触发时所述手持控制设备的姿态信息满足预设条件时,将所述初始化操作触发时所述手持控制设备的姿态信息作为所述手持控制设备的参考姿态信息,并将所述初始化操作触发时所述无人机的姿态信息作为所述无人机的参考姿态信息;
[0408]
否则,输出提示信息以提示用户调整所述手持控制设备的姿态。
[0409]
示例性的,所述处理器还用于:
[0410]
在所述无人机起飞到离地预设高度时,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0411]
示例性的,所述处理器还用于:
[0412]
当所述无人机处于自动降落状态时,控制所述无人机的云台在俯仰方向上向下转动预设角度。
[0413]
示例性的,所述处理器还用于:
[0414]
当所述无人机处于自动降落状态时,若获取到的油门杆量大于预设油门杆量阈值,使能根据所述手持控制设备的姿态信息,确定所述无人机的控制信息。
[0415]
本技术实施例提供的无人机的具体原理和实现方式均与前述实施例的无人机的控制方法类似,此处不再赘述。
[0416]
本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序中包括程序指令,所述计算机程序被处理器执行时使所述处理器实现上述实施例提供的无人机的控制方法的步骤。
[0417]
其中,所述计算机可读存储介质可以是前述任一实施例所述的无人机的内部存储单元,例如所述无人机的硬盘或内存。所述计算机可读存储介质也可以是所述无人机的外
部存储设备,例如所述无人机上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。
[0418]
请结合上述实施例参阅图17,图17是本技术实施例提供的头戴设备810的示意性框图。
[0419]
示例性的,头戴设备810可以为飞行眼镜,例如为第一视角(fpv,first person view)眼镜。
[0420]
该头戴设备810包括通信模块811以及一个或多个处理器812。
[0421]
其中,通信模块811用于获取无人机的控制信息,所述无人机的控制信息是根据手持控制设备的姿态信息确定的;一个或多个处理器812,单独地或共同地工作,用于根据所述无人机的控制信息在所述头戴设备810的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0422]
示例性的,无人机可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0423]
示例性的,手持控制设备获取自身的姿态信息,根据姿态信息确定所述无人机的控制信息,将所述无人机的控制信息发送给无人机以使无人机根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0424]
在一些实施方式中,所述处理器812根据所述无人机的控制信息在所述头戴设备810的显示模块显示标记时,用于根据所述无人机的控制信息、所述显示模块的显示参数计算所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
[0425]
示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。
[0426]
本技术实施例提供的头戴设备的具体原理和实现方式均与前述实施例的无人机的控制方法类似,此处不再赘述。
[0427]
请结合上述实施例参阅图18,图18是本技术实施例提供的头戴设备820的示意性框图。
[0428]
示例性的,头戴设备820可以为飞行眼镜,例如为第一视角(fpv,first person view)眼镜。
[0429]
该头戴设备820包括通信模块821以及一个或多个处理器822。
[0430]
其中,通信模块821用于获取手持控制设备的姿态信息;一个或多个处理器822,单独地或共同地工作,用于根据所述手持控制设备的姿态信息在所述头戴设备820的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0431]
在一些实施方式中,所述处理器根据所述手持控制设备的姿态信息在所述头戴设备820的显示模块显示标记时,用于根据所述手持控制设备的姿态信息、所述显示模块的显示参数计算所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
[0432]
示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。
[0433]
本技术实施例提供的头戴设备的具体原理和实现方式均与前述实施例的无人机
的控制方法类似,此处不再赘述。
[0434]
本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述实施例提供的无人机的控制方法的步骤。
[0435]
其中,所述计算机可读存储介质可以是前述任一实施例所述的头戴设备的内部存储单元,例如所述头戴设备的硬盘或内存。所述计算机可读存储介质也可以是所述头戴设备的外部存储设备,例如所述头戴设备上配备的插接式硬盘,智能存储卡(smart media card,smc),安全数字(secure digital,sd)卡,闪存卡(flash card)等。
[0436]
请结合前述实施例参阅图19,图19是本技术实施例提供的一种无人机的控制方法的流程示意图。
[0437]
示例性的,所述无人机的控制方法可以用于头戴设备。
[0438]
如图19所示,无人机的控制方法包括步骤s210至步骤s220。
[0439]
s210、获取无人机的控制信息,所述无人机的控制信息是根据手持控制设备的姿态信息确定的,所述无人机的控制信息用于调整所述无人机的姿态或者调整所述无人机的云台的姿态;
[0440]
s220、根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0441]
示例性的,所述无人机的控制信息包括所述无人机的目标偏航角度和/或所述无人机的目标偏航角速度;其中所述无人机的目标偏航角度用于控制所述无人机在偏航方向转动所述目标偏航角度,所述目标偏航角速度用于控制所述无人机在偏航方向以所述目标偏航角速度转动。
[0442]
示例性的,所述根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,包括:根据所述无人机的控制信息、所述显示模块的显示参数计算所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
[0443]
示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。
[0444]
请结合前述实施例参阅图20,图20是本技术实施例提供的一种无人机的控制方法的流程示意图。
[0445]
示例性的,所述无人机的控制方法可以用于头戴设备。
[0446]
如图20所示,无人机的控制方法包括步骤s310至步骤s320。
[0447]
s310、获取手持控制设备的姿态信息,所述手持控制设备的姿态信息用于确定所述无人机的控制信息,所述无人机的控制信息用于调整所述无人机的姿态或者调整所述无人机的云台的姿态。
[0448]
s320、根据所述手持控制设备的姿态信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0449]
示例性的,所述无人机的控制信息包括所述无人机的目标偏航角度和/或所述无人机的目标偏航角速度;其中所述无人机的目标偏航角度用于控制所述无人机在偏航方向转动所述目标偏航角度,所述目标偏航角速度用于控制所述无人机在偏航方向以所述目标偏航角速度转动。
[0450]
示例性的,所述根据所述无人机的控制信息在所述头戴设备的显示模块显示标
记,包括:根据所述无人机的控制信息、所述显示模块的显示参数计算所述标记在所述显示模块上的像素坐标,以便在所述显示模块显示标记。
[0451]
示例性的,所述显示参数包括所述显示模块的画面比例和分辨率。
[0452]
请结合前述实施例参阅图2,图2是本技术实施例提供的无人机的控制系统的结构示意图。
[0453]
如图2所示,无人机的控制系统包括手持控制设备、无人机和头戴设备。可以理解的,图2中手持控制设备、无人机和头戴设备之间的通信连接仅为一种实施方式,在另一些实施方式中,手持控制设备可以通过头戴设备与无人机通信连接,或者头戴设备可以通过手持控制设备与无人机通信连接。在其他一些实施方式中,手持控制设备和头戴设备可以通过中继设备与无人机通信连接。
[0454]
其中,无人机可以为旋翼型无人机,例如四旋翼无人机、六旋翼无人机、八旋翼无人机,也可以是固定翼无人机。头戴设备可以为飞行眼镜,例如为第一视角(fpv,first person view)眼镜。手持控制设备例如包括体感遥控器。
[0455]
其中,手持控制设备用于获取所述手持控制设备的姿态信息,所述姿态信息用于确定无人机的控制信息;无人机用于根据所述无人机的控制信息调整所述无人机的姿态或者调整所述无人机的云台的姿态;头戴设备,用于根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0456]
在一些实施方式中,无人机可以获取手持控制设备发送的姿态信息,根据手持控制设备的姿态信息确定所述无人机的控制信息,根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。
[0457]
在另一些实施方式中,手持控制设备获取自身的姿态信息,根据姿态信息确定所述无人机的控制信息,将所述无人机的控制信息发送给无人机以使无人机根据控制信息执行对应的动作,以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。示例性的,手持控制设备确定的无人机的控制信息可以直接发给无人机,或者为可以通过头戴设备发给无人机,传输更可靠。
[0458]
本技术实施例提供的无人机及其控制方法、系统、手持控制设备、头戴设备,以及计算机可读存储介质,通过获取手持控制设备的姿态信息,根据所述手持控制设备的姿态信息,确定所述无人机的控制信息;以及将所述无人机的控制信息发送给头戴设备,以使得所述头戴设备根据所述无人机的控制信息在所述头戴设备的显示模块显示标记,所述标记用于指示所述无人机的飞行方向。使得用户可以通过调整手持控制设备的姿态来控制无人机,符合人类直觉。通过显示标记指示所述无人机的飞行方向,能够带给用户更直观的操控体验,使得飞行操纵更加容易和安全。
[0459]
应当理解,在此本技术中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本技术。
[0460]
还应当理解,在本技术和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
[0461]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。