1.本实用新型涉及教学设备领域,具体涉及远程辅助用教学机器人。
背景技术:
2.电子信息化已经成为带动教育现代化、智能化,实现教育跨越式发展的重要手段。因此诞生了写字机器人、辅助教学机器人等,可以辅助教师的工作,可在一定程度上降低教师的工作强度。
3.现有的教学辅助机器人,在进行阅读、讲解、解答等工作时,通常放置在一个固定位置,教学辅助机器人不能自行移动,灵活性相对较低。
技术实现要素:
4.本实用新型的目的在于提供远程辅助用教学机器人,解决机器人不能自行移动,灵活性相对较低的问题。
5.为实现上述实用新型目的,本实用新型所采用的技术方案是:远程辅助用教学机器人,包括移动底盘,所述移动底盘上转动连接有机器人主体,所述机器人主体的顶部两侧壁上转动连接有机械臂机构,所述机械臂机构上连接有书写笔的夹持机构。
6.优选地,所述移动底盘为履带式或轮式。
7.优选地,所述书写笔为白板笔,所述夹持机构为夹套。
8.优选地,所述书写笔为粉笔,所述夹持机构包括安装座,所述安装座上设有笔腔,所述粉笔穿设在笔腔内,所述笔腔的外部连接有笔管,所述安装座内设有用于将粉笔顶出到笔管外的顶出结构。
9.优选地,所述笔管外套设有吸尘罩,所述吸尘罩连接在安装座上,所述吸尘罩的内部具有环形结构的积尘腔,所述吸尘罩的内壁上设有吸气孔,所述罩内还设有气泵,所述气泵的进气端与积尘腔相连通,所述积尘腔内设有挡尘环。
10.优选地,所述吸尘罩包括环座,所述环座的一侧连接有内管,所述内管外套设有外管,所述外管的一侧连接在环座上,所述外管的另一端具有积尘部,所述积尘部插设在内管中,所述内管和外管之间的区域为积尘腔,所述吸气孔设置在内管上,所述内管的外壁上设有一圈凸沿,所述挡尘环套设在内管上并抵紧在凸沿上。
11.优选地,所述外管的内壁上设有若干呈倒v形的凸棱,所述凸棱的厚度与积尘腔的厚度相适配,所述吸气孔位于相邻的两个凸棱之间的内管壁上。
12.优选地,所述挡尘环上放置有多个球珠。
13.本实用新型的有益效果集中体现在:
14.1、本实用新型的机器人具有移动底盘,机器人控制机器人移动,机器人的灵活度较高。
15.2、本实用新型的机器人还具有机械臂,机械臂由多个关节构成,同时机械臂上搭载了夹持机构,夹持机构上夹有书写笔后,机器人可以进行书写、绘画等操作,丰富了机器
人的功能,提升了机器人的实用性。
附图说明
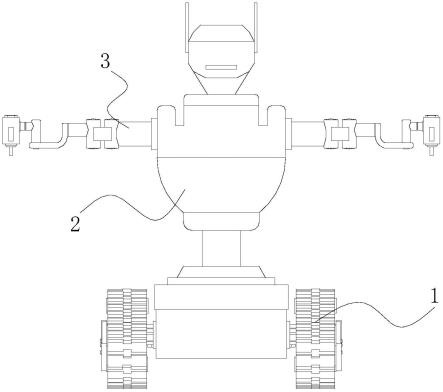
16.图1是本实用新型机器人整体结构示意图;
17.图2是本实用新型吸尘罩内部结构示意图;
18.图3是图2所示结构中a部放大图;
19.图4是本实用新型环座和内管装配示意图;
20.图5是本实用新型顶出结构示意图;
21.图6是本实用新型主控电路框图;
22.图例说明:1、移动底盘;2、机器人主体;3、机械臂机构;4、安装座;5、笔腔;6、笔管;7、积尘腔;8、吸气孔;9、气泵;10、挡尘环;11、环座;12、内管;13、外管;14、积尘部;15、凸沿;16、凸棱;17、球珠;18、推杆;19、主动齿轮;20、齿条;21、弧形通道;22、密闭盖。
具体实施方式
23.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图和具体实施例对本实用新型作进一步的详细说明。
24.如图1-6所示,远程辅助用教学机器人,包括移动底盘1,在本实施例中移动底盘1采用履带式或者轮式结构,如图1所示,所述移动底盘1上转动连接有机器人主体2,机器人主体2可以在移动底盘1上旋转,改变机器人主体2的方向和位置等,具有较高的灵活度,所述机器人主体2的顶部两侧壁上转动连接有机械臂机构3,在本实施例中机械臂机构3优选采用六轴机械臂,所述机械臂机构3上连接有书写笔的夹持机构,因此机器人可完成书写、绘画等教学辅助操作,丰富了机器人的功能,提升了机器人的实用性。
25.在本实施例中根据书写笔的种类设置夹持机构,例如书写笔采用中性笔、白板笔等,消耗油墨等类型的笔,夹持机构可以直接是夹套,书写笔被夹在夹套上。
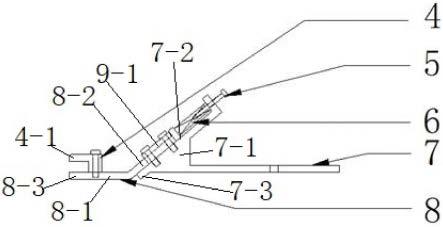
26.又例如采用粉笔等消耗本身的类型,需要设置单独的夹持机构,而粉笔具有成本低,应用相对广泛,本实施例中的机器人在进行书写或绘图等教学时,也主要采用粉笔;因此所述夹持机构包括安装座4,所述安装座4上设有笔腔5,所述粉笔穿设在笔腔5内,所述笔腔5的外部连接有笔管6,所述安装座4内设有用于将粉笔顶出到笔管6外的顶出结构。
27.如图5所示,在本实施例中所述顶出结构包括穿设在笔腔5上方的推杆18,所述安装座4内设有电机,所述电机的传动连接有主动齿轮19,所述推杆18上设有与主动齿轮19相啮合的齿条20,电机带动推杆18在笔腔5内移动,可将粉笔顶入到笔管6内,再从笔管6内顶出,进而实现书写。
28.进一步地,所述安装座4上设有与笔腔5相连通的弧形通道21,弧形通道21的高度与粉笔的高度相适配,因此可在弧形通道21内装数只粉笔,当笔管6内的粉笔用完后,电机反转带动推杆18上升回到初始位置,弧形通道21内的粉笔可滑入到笔腔5内,此时可再由推杆18将粉笔顶出,减少了粉笔的更换次数,提高了便捷性,所述弧形通道21的外部端设有密闭盖22,可防止粉笔掉落出安装座4外。
29.进一步地,由于粉笔在书写的过程中,会产生大量的灰尘,灰尘进入到机器人内部后,易导致内部器件的损坏,增加了后期维护的次数;对此在所述笔管6外套设有吸尘罩,如
图2-4所示,所述吸尘罩连接在安装座4上,吸尘罩可直接连接在安装座4上,拆装方便;所述吸尘罩的内部具有环形结构的积尘腔7,所述吸尘罩的内壁上设有吸气孔8,所述罩内还设有气泵9,所述气泵9的进气端与积尘腔7相连通,所述积尘腔7内设有挡尘环10,挡尘环10由环体和过滤网构成;吸尘罩套在笔管6上后,笔管6和吸尘罩之间具有间隙,在书写的时候启动气泵9,吸气孔8吸气,将书写时产生的笔灰吸走,具有灰尘的气流在经过挡尘环10时,灰尘被阻挡在积尘腔7内,实现灰尘的收集、避免灰尘弥散在空气中。
30.进一步地,为了方便对积尘腔7内堆积的笔灰进行清理,所述吸尘罩包括环座11,所述环座11的一侧连接有内管12,内管12螺纹连接在环座11上,所述内管12外套设有外管13,所述外管13的一侧也通过螺纹连接在环座11上,所述外管13的另一端具有积尘部14,所述积尘部14插设在内管12中,所述内管12和外管13之间的区域为积尘腔7,所述吸气孔8设置在内管12上,所述内管12的外壁上设有一圈凸沿15,所述挡尘环10套设在内管12上并抵紧在凸沿15上;挡尘环10的外径与外管13的内径相适配;因此在工作一段时间后,直接将外管13从环座11上拧下,笔灰就堆积在外管13下部的积尘部14内。
31.进一步地,在积尘腔7内堆积一定笔灰后,在气流的作用下,又会激起堆积的灰尘,进而会影响挡尘网的过滤效率;对此在本实施例中,所述外管13的内壁上设有若干呈倒v形的凸棱16,如图4所示,所述凸棱16的厚度与积尘腔7的厚度相适配,所述吸气孔8位于相邻的两个凸棱16之间的内管12壁上,产生的灰尘会滑动到凸棱16下方的区域内,凸棱16的设置可起到一定的隔离气流的作用,在一定程度上减小了灰尘的激荡,同时激起的灰尘也不易进入到凸棱16的上方。
32.进一步地,挡尘环10在吸附上一定灰尘后,过滤性能会降低;为了保障挡尘环10的过滤性能,因此在所述挡尘环10上放置有多个球珠17,在书写的过程中,安装座4会产生不同方向的位移,因此球珠17会在挡尘环10的上方移动,在移动过程中发生的碰撞会使挡尘环10出现振动,将挡尘环10上吸附的灰尘抖下去。
33.进一步地,本实用新型还包括用于控制机器人主体2的主控电路,如图6所示,主控电路包括控制器、音频识别模块、伺服电机、六轴机械臂驱动模块、摄像模块和显示模块,所述音频识别模块、伺服电机、六轴机械臂驱动模块、摄像模块和显示模块均与控制器电性相连;其中伺服电机安装在移动底盘1上,可驱动机器人进行移动行走,具有良好的灵活性;六轴机械臂驱动模块用于驱动六轴机械臂机构3动作,可使机器人完成多种动作,例如写字、绘图等;音频识别功能能够识别用户的语音,增强了人机交互能力,提高了实用性,有利于推广应用;摄像模块和显示模块,显示模块可以用于显示图像信息,摄像模块可用于图像识别等;控制器可以采用stm32系列的单片机等。
34.进一步地,所述主控电路还包括电源模块、通信模块和存储模块,所述电源模块为主控电路提供工作电源,所述通信模块和存储模块均与控制器电性相连,通信模块采用wifi模块、4g模块等,可实现机器人与其它智能设备(如移动手机等)进行通信连接;还包括避障模块,所述避障模块与控制器电性相连,避障模块可采用雷达传感器,防止机器人在移动时碰撞到其它物体。
35.需要说明的是,对于前述的各个方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本技术并不受所描述的动作顺序的限制,因为依据本技术,某一些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该
知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和单元并不一定是本技术所必须的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。