1.本实用新型涉及通信技术和控制技术领域,具体涉及一种无人机发射车车载天线智能控制装置。
背景技术:
2.无人机巡线是目前无人巡检的重要手段。目前露天原地操控方式的巡检范围有限,而车载无人机操控虽然消除了巡检范围限制,但无人机的信号不稳定。现有车载无人机所搭配的车载天线普遍固定安装在运载车顶,无法搭配如nmowb150b等小范围强信号但需要频繁进行指向调节的信号收发天线,另外,整体天线系统也缺少能够针对接收数据进行调制和去干扰处理以保持信号持续稳定的相关功能机构。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种无人机发射车车载天线智能控制装置,其通过设置中转控制盒对车外天线的指向控制和接收信号的中间处理,实现了车外天线与无人机之间通讯信号强度优化和接收信号去干扰处理以及车内数据短距离无线数传。
4.本无人机发射车车载天线智能控制装置包括用于接收手柄控制信号和无人机采集图像数据的中转控制盒和用于固定信号发射天线的固定机构,所述中转控制盒和设置在车厢内,所述固定机构设置在车顶,其中,所述中转控制盒与固定机构通过通讯信号线和控制信号线相连接,所述中转控制盒内部主板上集成有处理模块、无线数传模块、信号调制模块、继电器模组、滤波模块、信号放大模块、存储模块、电源模块;所述固定机构包括基座,转动连接在基座内的立架,转动连接在立架上端的颈架,固定在基座上的第一步进电机和固定在立架上的第二步进电机。
5.具体到中转控制盒内部主板功能模块元件及其逻辑连接关系,所述处理模块的pb2~10tim输出端管脚与所述继电器模组各线圈相连接,所述处理模块(11)的pa1~4usart输入端管脚与所述信号调制模块、滤波模块、信号放大模块依次连接,,所述无线数传模块通过txd/rxd总线管脚与处理模块相连接,所述存储模块通过cts/rts读写输入端管脚与处理模块相连接,所述电源模块为主板上各模块供电。
6.具体到固定机构的机械驱动,所述第一步进电机通过减速齿轮组与所述立架下部齿轮缘相啮合;所述第二步进电机通过减速齿轮组与所述颈架一侧的齿轮缘相啮合。
7.具体到天线动作控制信号的发送和天线接收无人机信号的处理,所述信号发射天线通过rs485数据线与所述信号调制模块连接;所述第一步进电机和第二步进电机的步进控制器与所述继电器模组通过信号控制线连接。
8.具体到核心功能模块的选择,所述处理模块采用stm32f105处理器为核心单片机的最小系统电路;无线数传模块采用hc-12si433mhz数据透传模块继电器模组采用yx-m01四路继电器模组;滤波模块采用dc-l低通滤波器;信号放大模块采用tbd62003功率放大器;电源模块采用ib2405s-2w的隔离型dc-dc电源变换模块。
9.具体到所述车载无人机天线的选择,所述信号发射天线采用nmowb150b(base/whip,3db/135-174mhz)射频信号双向发射接收天线。
10.本实用新型一种无人机发射车车载天线智能控制装置,通过设置中转控制盒对车外天线的指向控制和接收信号的中间处理,实现了车外天线与无人机之间通讯信号强度优化和接收信号去干扰处理以及车内数据短距离无线数传,从整体上优化了天线控制信号和接收数据信号的质量。
附图说明
11.下面结合附图对本实用新型一种无人机发射车车载天线智能控制装置作进一步说明:
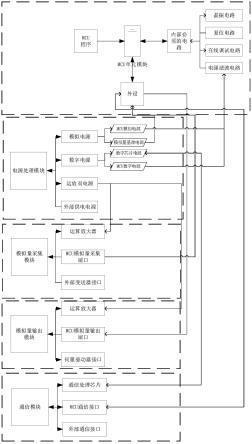
12.图1是本无人机发射车车载天线智能控制装置的平面结构示意图;
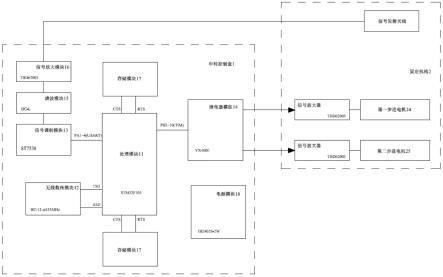
13.图2是本无人机发射车车载天线智能控制装置的逻辑机构连接线框图。
14.图中:
15.1-中转控制盒;11-处理模块、12-无线数传模块、13-信号调制模块、14-继电器模组、15-滤波模块、16-信号放大模块、17-存储模块、18-电源模块;
16.2-固定机构;21-基座、22-立架、23-颈架、24-第一步进电机、25-第二步进电机。
具体实施方式
17.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
18.在本实用新型的描述中,需要理解的是,术语“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置关系均为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
19.以下用具体实施例对本实用新型技术方案做进一步描述,但本实用新型的保护范围不限制于下列实施例。
20.实施方式1:如图1、2所示,本无人机发射车车载天线智能控制装置包括用于接收手柄控制信号和无人机采集图像数据的中转控制盒1和用于固定信号发射天线的固定机构2,所述中转控制盒1和设置在车厢内,所述固定机构2设置在车顶,其中,所述中转控制盒1与固定机构2通过通讯信号线和控制信号线相连接,所述中转控制盒1内部主板上集成有处理模块11、无线数传模块12、信号调制模块13、继电器模组14、滤波模块15、信号放大模块16、存储模块17、电源模块18;所述固定机构2包括基座21,转动连接在基座21内的立架22,转动连接在立架22上端的颈架23,固定在基座21上的第一步进电机24和固定在立架22上的第二步进电机25。具体到核心功能模块的选择,所述处理模块11采用stm32f105处理器为核心单片机的最小系统电路;无线数传模块12采用hc-12si433mhz数据透传模块继电器模组采用yx-m01四路继电器模组14;滤波模块15采用dc-l低通滤波器;信号放大模块16采用
tbd62003功率放大器;电源模块18采用ib2405s-2w的隔离型dc-dc电源变换模块。
21.实施方式2:本无人机发射车车载天线智能控制装置所述处理模块11的pb2~10tim输出端管脚与所述继电器模组14各线圈相连接,所述处理模块11的pa1~4usart输入端管脚与所述信号调制模块13、滤波模块15、信号放大模块16依次连接,所述无线数传模块12通过txd/rxd总线管脚与处理模块11相连接,所述存储模块17通过cts/rts读写输入端管脚与处理模块11相连接,所述电源模块18为主板上各模块供电。其余结构和部件如实施方式1所述,不再重复描述。
22.实施方式3:本无人机发射车车载天线智能控制装置所述第一步进电机24通过减速齿轮组与所述立架22下部齿轮缘相啮合;所述第二步进电机25通过减速齿轮组与所述颈架23一侧的齿轮缘相啮合。其余结构和部件如实施方式1所述,不再重复描述。
23.实施方式4:本无人机发射车车载天线智能控制装置所述信号发射天线通过rs485数据线与所述信号调制模块13连接;所述第一步进电机24和第二步进电机25的步进控制器与所述继电器模组14通过信号控制线连接。其余结构和部件如实施方式1所述,不再重复描述。
24.实施方式5:本无人机发射车车载天线智能控制装置所述信号发射天线采用nmowb150b(base/whip,3db/135-174mhz)射频信号双向发射接收天线。其余结构和部件如实施方式1所述,不再重复描述。
25.运行时:通过遥控手柄向中转控制盒发送天线调节信号,中转控制盒利用无线数传模块接收信号后,经处理模块转化为脉冲信号经继电器模组向第一、二步进电机的步进控制器发送,步进电机驱动立架和颈架转动,调节信号收发天线的指向,已获得最大的信号强度,天线接收无人机发送的数据后,通过放大模块和滤波模块对载波信号进行放大和去干扰后,发送至处理模块,处理模块一路经无线数传模块向车载显示设备发送,另一路通过存储模块对数据进行可覆盖式存储,无人机控制信号则通过无线数传模块发送至处理模块,然后经信号调制模块载波调制后,经滤波放大向通过天线向无人机发送。从而实现了车外天线与无人机之间通讯信号强度优化和接收信号去干扰处理以及车内数据短距离无线数传,从整体上优化了天线控制信号和接收数据信号的质量。
26.本无人机发射车车载天线智能控制装置通过设置中转控制盒对车外天线的指向控制和接收信号的中间处理,实现了车外天线与无人机之间通讯信号强度优化和接收信号去干扰处理以及车内数据短距离无线数传,从整体上优化了天线控制信号和接收数据信号的质量。
27.以上描述显示了本实用新型的主要特征、基本原理,以及本实用新型的优点。对于本领域技术人员而言,显然本实用新型不限于上述示范性实施方式或者实施例的细节,且在不背离本实用新型的精神或者基本特征的情况下,能够以其他的具体形式实现本实用新型。因此应将上述实施方式或者实施例看作示范性的,且非限制性的。本实用新型的范围由所附权利要求而非上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
28.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当
将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。