1.本发明涉及刀具加工设备技术领域,更具体的是涉及一种焊接刀具自动组装设备及其组装方法技术领域。
背景技术:
2.机械加工用的数控刀具包括作为加工部的刀头切削刃部和作为夹持部的刀柄部分,现有生产数控刀具工厂为节省成本,会针对数控加工刀具的要求将夹持部位的部分改为成本较低的材料,例如工具钢,仅加工部采用硬质合金或金刚石。这种数控刀具生产会存在一个工艺,即作为加工部的硬质合金或金刚石刀头和作为夹持部分的工具钢刀柄进行焊接。
3.例如:现有技术cn201821725478.0公开的菱形断屑刀片,在生产这种刀具基体的固定部位安装切削片体,并在刀具基体的中心处开有刀具固定螺栓孔,为迎合市场供给需求,需要批量生产菱形断屑刀具。
4.存在的缺陷在于,现生产菱形断屑刀具过程为:手工拿取刀具基体后,拾取涂抹工具蘸取焊接剂涂抹于刀具基体的焊接部,继而手持镊子夹取切削片体放置于刀具基体的焊接剂涂抹区域,并人工压紧刀具基体与切削片体的黏合,该过程效率较低,无法适应大批量生产菱形断屑刀片,同时,对于人工操作需要一定的熟练度才能把控蘸取涂胶涂抹量、以及快速切换各种对应的工具,所以,综上所述,为迎合市场需求,现需要一种机械设备来生产菱形断屑刀片,替代人工生产菱形断屑刀片出现的问题。
技术实现要素:
5.本发明的目的在于:为了解决上述技术问题,本发明提供一种焊接刀具自动组装设备及其组装方法。
6.本发明为了实现上述目的具体采用以下技术方案:
7.一种焊接刀具自动组装设备,包括工装台,在所述工装台上安装有自动上下料装置,所述自动上下料装置包括第一机器人,第一机器人底部与工装台连接,在所述第一机器人上安装有夹持组件,所述夹持组件包括第一气缸,所述第一气缸的顶部与第一机器人连接,在第一气缸的底部设置有限位块,所述限位块的底部设置有两个顶块,每个顶块的中部均与限位块铰接,每个顶块的一端均与第一气缸的活塞杆铰接,每个顶块的另一端安装有卡块。
8.进一步的,在工装台上分别安装有第一存料盘和第二存料盘,且第一存料盘和第二存料盘均与第一机器人相邻设置。
9.进一步的,在所述工装台的中部安装有转盘以及驱动转盘转动用的多工位分割器,所述多工位分割器底部与工装台连接,且转盘连接在多工位分割器顶部的驱动轴上。
10.进一步的,在所述工装台上设置有涂胶装置,所述涂胶装置包括精密螺杆点胶阀以及驱动精密螺杆点胶阀分别沿工装台的x轴、y轴、z轴移动用的涂胶滑台模组,涂胶滑台
模组安装在工装台上,精密螺杆点胶阀安装在涂胶滑台模组上。
11.进一步的,在所述工装台上设置有切削片体吸附组件,所述切削片体吸附组件包括第二机器人,所述第二机器人安装在工装台上,所述第二机器人上分别安装有用于吸取切削片体的真空吸盘、以及定位刀具用的ccd影像检测器。
12.进一步的,在所述工装台上设置有用于切削片体自动排列的震动盘,所述震动盘与工装台连接,且震动盘与第二机器人相邻设置。
13.进一步的,在所述工装台上设置有刀具压合模具,所述刀具压合模具包括支撑座,所述支撑座的侧面设置有角度调节板,在角度调节板上分别开有定位孔和弧形槽孔,所述定位孔和弧形槽孔均安装有定位螺杆,两定位螺杆均与支撑座螺纹连接;在所述角度调节板上设置有第二气缸,第二气缸与角度调节板连接,在第二气缸的推杆上安装有压紧支架,所述第二气缸支架上安装有压块。
14.进一步的,在所述安装板底部设置有机架,所述机架与安装板连接。
15.进一步的,在所述机架的底部沿其周向矩阵分布有至少四个万向轮,且每个所述万向轮均与机架连接。
16.一种焊接刀具的组装方法,包括以下步骤:
17.s.自动上料:在第一工位中,由自动上下料装置的第一机器人拾取存料盘中刀具基体,并将其刀具基体运送至转盘上,接着通过多工位分割器驱动转盘移动至第二工位;
18.s.自动喷涂焊接剂:在第二工位中,由涂胶装置的涂胶滑台模组对精密螺杆点胶阀移动至预定位置后,精密螺杆点胶阀对刀具基体的指定部位喷涂焊接剂作业,随后,再通过多工位分割器驱动转盘将待刀具基体移动至第三工位;
19.s.自动组装切削片体:在第三工位中,由切削片体吸附组件的第二机器人带动真空吸盘移动至预定位置,并由真空吸盘吸取自动排列震动盘中的切削片体,后进过二机器人移动并放置在刀具基体的指定位置,再通过多工位分割器驱动转盘将待刀具基体移动至第四工位;
20.s.自动压合:在第四工位中,刀具压合模组的预先对角度调节板角度调节之后,第二气缸推动压块向转盘处移动,将转盘与压块之间的刀具基体和切削片体压合,再通过多工位分割器驱动转盘将待刀具基体移动至第一工位。
21.s.自动下料:由第一工位的自动上下料装置的第一机器人带动夹持组件移动,再通过夹持组件对自动压合后的刀具夹持,在第一机器人带动夹持组件将其夹持的刀具移动至预定位置。
22.本发明的有益效果如下:
23.1.为了减少人工作业的工作量,因此设计机械结构抓取刀具基体方式替代人工拾取刀具基体,具体由第一机器人带动夹持组件移动,再由夹持组件的第一气缸推动顶块转动,顶块中部铰接在限位块,则将两顶块的另一端向外翻转,所以两顶块配合夹持刀具基体。
24.2.为了减少人工手动对刀具基体上喷涂作业,因此设计喷涂焊接剂装置,涂胶滑台模组是能够沿工装台的x轴、y轴、z轴对精密螺杆点胶阀进行移动,最终精密螺杆点胶阀准确喷涂至刀具基体的指定区域。
25.3.为了减少人工手动对刀具基体上安装切削片体的操作,设计切削片体吸附组
件,真空吸盘吸取切削片体,并在机器人移动将其移动至与之对应的焊接剂喷涂至刀具基体的指定区域。
26.4.为了使得切削片体与刀具基体压紧,避免焊接剂分布不均,设计刀具压合模组,刀具压合模组的预先对角度调节板角度调节之后,第二气缸推动压块向转盘处移动,并将转盘与压块之间的刀具基体和切削片体压合,此过程使得切削片体与刀具基体的连接更紧密。
27.5.设置的机架对于安装板抬升一定的高度,并起着一定的支撑,为了便于移动设备整体,所以在机架的底部的四角处各安装一个万向轮。
附图说明
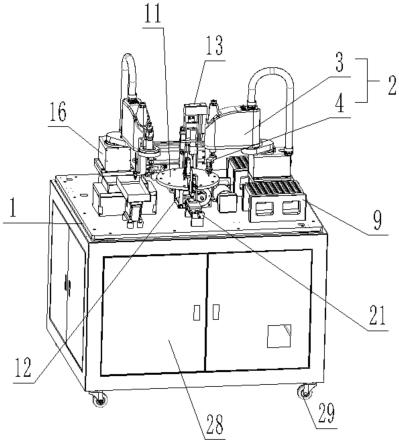
28.图1是本发明的整体结构示意图;
29.图2是本发明的平面结构十示意图;
30.图3是本发明的喷涂装置结构示意图;
31.图4是本发明的切削片体吸附组件结构示意图;
32.图5是本发明的刀具压合模组结构示意图;
33.图6是本发明的自动上下料装置结构示意图;
34.图7是本发明的图5中a1处结构放大示意图;
35.图8是本发明的夹持组件的结构示意图。
36.附图标记:1-工装台、2-自动上下料装置、3-第一机器人、4-夹持组件、5-第一气缸、6-限位块、7-顶块、8-卡块、9-第一存料盘、10-第二存料盘、11-转盘、12-多工位分割器、13-喷涂装置、14-喷涂焊接剂模组、15-精密螺杆点胶阀、16-切削片体吸附组件、17-第二机器人、18-真空吸盘、19-ccd影像检测器、20-震动盘、21-刀具压合模组、22-支撑座、23-角度调节板、231-定位孔、232-弧形槽孔、24-定位螺杆、25-第二气缸、26-压紧支架、27-压块、28-机架、29-万向轮。
具体实施方式
37.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和出示的本发明实施例的组件可以以各种不同的配置来布置和设计。
38.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.实施例1
40.如图1-8所示,本实施例提供一种焊接刀具自动组装设备,包括工装台1,在所述工装台1上安装有自动上下料装置2,所述自动上下料装置2包括第一机器人3,第一机器人3底部与工装台1连接,在所述第一机器人3上安装有夹持组件4,所述夹持组件4包括第一气缸5,所述第一气缸5的顶部与第一机器人3连接,在第一气缸5的底部设置有限位块6,所述限
位块6的底部设置有两个顶块7,每个顶块7的中部均与限位块6铰接,每个顶块7的一端均与第一气缸5的活塞杆铰接,每个顶块7的另一端安装有卡块8。
41.上述结构中,为了减少人工作业的工作量,因此设计机械结构抓取刀具基体方式替代人工拾取刀具基体,具体由第一机器人3带动夹持组件4移动至刀具基体的通孔中,夹持组件4的第一气缸5以第一机器人3做支撑,第一气缸5的底部安装限位块6,第一气缸5的活塞杆穿过限位块6后推动顶块7转动,顶块7中部铰接在限位块6,则顶块7的另一端向外翻转,两个顶块7上分别安装一个卡块8,所以两顶块7同时向外翻转抵接在刀具基体的孔内,进而夹持刀具基体,随后,通过第一机器人3带动夹持组件4移动至下一指定位置,再由第一气缸5复位,两顶块7收拢,则刀具基体脱离夹持组件4。
42.实施例2
43.本实施例基于上一实施例的基础上开展,如图2所示,在工装台1上分别安装有第一存料盘9和第二存料盘10,且第一存料盘9和第二存料盘10均与第一机器人3相邻设置,设置第一存料盘9用于储放刀具基体,第二存料盘10则对加工后的工件提供储存空间。
44.并且,如图2所示,在所述工装台1的中部安装有转盘11以及驱动转盘11转动用的多工位分割器12,所述多工位分割器12底部与工装台1连接,且转盘11连接在多工位分割器12顶部的驱动轴上,驱动转盘11转动用的多工位分割器12安装在工装台1的中部,多工位分割器12带动转盘11旋转,进而将放置在转盘11转移到与之对应的工位上,减少人员配送后人工转移工件。
45.如图1和图3所示,在所述工装台1上设置有喷涂装置13,所述喷涂装置13包括精密螺杆点胶阀15以及驱动精密螺杆点胶阀15分别沿工装台1的x轴、y轴、z轴移动用的喷涂焊接剂模组14,喷涂焊接剂模组14安装在工装台1上,精密螺杆点胶阀15安装在喷涂焊接剂模组14上,喷涂焊接剂模组14是能够沿工装台1的x轴、y轴、z轴对精密螺杆点胶阀15进行移动,最终精密螺杆点胶阀15准确喷涂至刀具基体的指定区域。
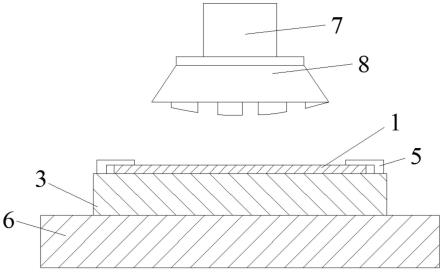
46.如图4所示,在所述工装台1上设置有切削片体吸附组件16,所述切削片体吸附组件16包括第二机器人17,所述第二机器人17安装在工装台1上,所述第二机器人17上分别安装有用于吸取切削片体的真空吸盘18、以及定位切削片体用的ccd影像检测器19,第二机器人17对带动真空吸盘18吸取切削片体并将其放置到精密螺杆点胶阀15准确喷涂至刀具基体的指定区域,此过程中,ccd影像检测器骑着三维空间位置定位,确保其准确性,由于需要对正反面进行选择,因此在工装台1上安装震动盘20,震动盘20内的震动器产生震动促使震动盘20上方放置的刀片翻面,为了使得真空吸盘18便于拾取震动盘20内的切削片体,限制震动盘20与第二机器人17相邻设置来确定二者的位置关系;切削片体吸附组件16的工序完成之后,多工位分割器12带动转盘11将刀具基体流入刀具压合模组21的工位中,由刀片压合模组21对刀具基体和切削片体压紧,其刀具压合模具21安装在工装台1上,刀具压合模具21包括支撑座22,所述支撑座22的侧面设置有角度调节板23,在角度调节板23上分别开有定位孔231和弧形槽孔232,所述定位孔231和弧形槽孔232均安装有定位螺杆24,两定位螺杆24均与支撑座22螺纹连接;在所述角度调节板23上设置有第二气缸25,第二气缸25与角度调节板23连接,在第二气缸25的推杆上安装有压紧支架26,所述第二气缸25支架上安装有压块27,压合时,第二气缸25以角度调节板23作为支撑,第二气缸25的推杆上压紧支架26向下方的转盘11处移动,压紧支架26上的压块27向转盘11处移动,压块27与转盘11之间的
间距缩小,继而压紧放置在压块27与转盘11之间刀具基体和切削片体予以压紧;,同时,角度调节板23与支撑座22连接,角度调节板23与支撑座22之间具有两个定位点,即定位孔231和弧形槽孔232内的两个定位螺杆24,例如:其中一个定位螺杆24穿过定位孔231与支撑座22开有的螺纹孔丝接,另一个定位螺杆24穿过弧形槽孔232与支撑座22开有的螺纹孔丝接,转动角度调节板23时,则以定位孔231的轴心为圆心,以弧形槽孔232与定位孔之间的间距为半径,并以弧形槽孔232的弧长限制转动角度调节板23最大角度,最后通过转动两定位螺杆24对角度调节板23与支撑座22固定,所以对后续需要倾斜向下压紧刀具基体提供更多的选择。
47.如图1所示,在所述安装板底部设置有机架28,所述机架28与安装板连接,设置的机架28对于安装板抬升一定的高度,并起着一定的支撑,为了便于移动设备整体,所以在机架28的底部的四角处各安装一个万向轮29。
48.一种焊接刀具的组装方法,包括以下步骤:
49.s1.自动上料:在第一工位中,由自动上下料装置的第一机器人拾取存料盘中刀具基体,并将其刀具基体运送至转盘上,接着通过多工位分割器驱动转盘移动至第二工位;
50.s2.自动喷涂焊接剂:在第二工位中,由喷涂装置的喷涂焊接剂模组对精密螺杆点胶阀移动至预定位置后,精密螺杆点胶阀对刀具基体的指定部位喷涂焊接剂作业,随后,再通过多工位分割器驱动转盘将待刀具基体移动至第三工位;
51.s3.自动装组合:在第三工位中,由切削片体吸附组件的第二机器人带动真空吸盘移动至预定位置,并由真空吸盘吸取自动排列震动盘中的切削片体,后进过第二机器人移动并放置在刀具基体的指定位置,再通过多工位分割器驱动转盘将待刀具基体移动至第四工位;
52.s4.自动压合:在第四工位中,刀具压合模组的预先对角度调节板角度调节之后,第二气缸推动压块向转盘处移动,将转盘与压块之间的刀具基体和切削片体压合,再通过多工位分割器驱动转盘将待刀具基体移动至第一工位。
53.s5.自动下料:由第一工位的自动上下料装置的第一机器人带动夹持组件移动,再通过夹持组件对自动压合后的刀具夹持,在第一机器人带动夹持组件将其夹持的刀具移动至指定位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。