1.本发明属于机器人交互领域,涉及一种柔性触觉传感器,特别是涉及一种基于电极阵列的柔性触觉传感器及其制备方法。
背景技术:
2.随着机器人技术的发展,机器人与环境交互的需求越来越大,触觉作为一种对外界环境的感知方式,越来越多地被应用在机器人领域,在机器人的各种作业任务中具有十分重要的现实意义。
3.根据测量原理的区别,目前主流的触觉传感器可以分为压电式、电容式、电阻式、超声波式和光纤式触觉传感器,不同类型的触觉传感器特性不同,适合于特定的应用场景,但大多数触觉传感器柔性较差,不具备仿生结构,尤其在仿人机器人领域的研究中,亟需一种柔性好、仿生结构优良的触觉传感器作为机器人与环境或人类交互的部件。
技术实现要素:
4.鉴于已有的触觉传感器不能满足机器人柔性感知的需求,本发明的目的在于提供一种基于电极阵列的柔性触觉传感器,其具有柔性好、低成本、适应性高的特点。
5.为实现上述目的,本发明采用的技术方案是:
6.一种基于电极阵列的柔性触觉传感器,其特征在于:至少包括一个电路板和设于电路板上具有弹性的软质仿体,所述电路板和软质仿体之间充满导电液体,软质仿体下表面设有若干能与电路板接触并变形的软质凸起;所述电路板上设有若干与导电液体接触的电极点和用于测量电极点之间液体电阻变化的数据采集装置,电极点之间的电路板上绝缘设置;通过相应电极点处液体电阻变化确定施加与软质仿体上力的位置和大小。
7.进一步地,所述电极点包括若干交错分布的激励电极点和感知电极点,所述数据采集装置包括数据采集卡、参考电阻、电容和用于发出激励信号的激励源;
8.所有激励电极点并联后通过电容串联在激励源上,所述激励源发出矩形脉冲激励电压,经过电容转化为双极性交流电压加载至激励电极点;
9.每个感知电极点后连接一个参考电阻,参考电阻另一端接地,所述数据采集卡用于采集参考电阻的电压分值。
10.本发明还提供一种上述柔性触觉传感器的制备方法,其特征在于,包括如下步骤:
11.步骤1、根据软质仿体形状和尺寸制备模具,采用硅胶浇注制备软质仿体;
12.步骤2、将电路板通过胶黏安装在基座中部,将排针置于基座的中控槽内;
13.步骤3、将软质仿体覆盖在电路板上,软质仿体下部的密封凸起装配在基座的密封沟槽内,将环形压板压紧在软质仿体上,并通过紧固件将环形压板固定在基体上;
14.步骤4、将一个空心针头从环形压板上的一个穿刺孔刺穿圆台状凸起直至锥形孔内作为排气管,带有导电液体的注射针头从另一个穿刺孔刺穿圆台状凸起直至锥形孔内注入密封空间内,直至密封空间内充满导电液体,拔掉空心针头和注射针头,完成导电液体的
填充;
15.步骤5、将电路板的电极点通过排针与数据采集装置相连;
16.步骤6、压力标定,使用标准力传感器按压触觉传感器,记录下标准力传感器示数、感知电极点电压值和压强传感器测量值,使用模型对数据进行拟合、训练之后得到标定的函数模型,即完成柔性触觉传感器的制备。
17.本发明的有益效果是:
18.1、通过感知电极的电压变化可以快速定位接触点,且数据采集速率随着数据采集器性能的提高可以达到很高。
19.2、使用模型拟合所有感知电极的电压值、压强传感器测量值与接触的真实压力值之间的关系,训练得到的模型可以用来预测接触力的大小,在一定范围内可以达到很高精度。
20.3、使用硬度接近人体皮肤的仿体硅胶,使传感器具有仿生特性,且仿生硅胶下层填充为导电液,进一步增大了接触区域的柔性,可以和各种不同形状的物体充分接触。
21.4、传感器主要部件使用3d打印技术制作,支持快速修改与成型,可以方便地修改传感器外形以适应各种使用场景,且相比于同类其他产品,制作成本极低。
附图说明
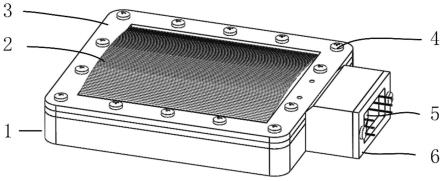
22.图1是本发明所述的柔性触觉传感器的整体外形图;
23.图2是本发明所述的柔性触觉传感器的电路原理图;
24.图3是本发明所述的柔性触觉传感器的爆炸图;
25.图4是本发明所述的柔性触觉传感器的剖视图;
26.图5是本发明所述的柔性触觉传感器的硅胶仿体下表面结构图;
27.图6是本发明所述的柔性触觉传感器的基座结构图;
28.图7是本发明所述的柔性触觉传感器的导电液注射通道结构图;
29.图8是本发明所述的柔性触觉传感器的电路板结构图;
30.图9是本发明所述的柔性触觉传感器的硅胶仿体的上、下模具图。
31.其中,1-基座,11-密封沟槽,12-中部通孔,13-安装孔,14-安装槽,15-导电液注射通道,16-压力测量通道,17-压强传感器安装座,18-锥形孔,2-硅胶仿体,21-密封凸起,22-棱锥状凸起,23-半圆截面状条纹,24-圆台状凸起,25-触觉部,26-压边,3-环形压板,31-穿刺孔,4-螺钉,5-压强传感器,6-压片,7-电路板,71-底部排针,72-激励电极点,73-感知电极点,8-上模具,9-下模具。
具体实施方式
32.为了使本发明所要解决的技术问题、技术方案更加清晰明了,下面结合附图和实施例,对本发明提供的一种基于电极阵列的柔性触觉传感器进行详细说明,所述是对本发明的解释而不是限定。
33.如图1至图8所示,本发明提供一种基于电极阵列的柔性触觉传感器,至少包括一个电路板7和设于电路板7上具有弹性的软质仿体,所述电路板7和软质仿体之间充满导电液体,软质仿体下表面设有能与电路板7接触并变形的软质凸起;所述电路板7上设有大量
与导电液体接触的电极点和用于测量电极点之间液体电阻变化的数据采集装置,电极点之间的电路板7上绝缘设置;通过相应电极点处液体电阻变化确定施加与软质仿体上力的位置和大小。
34.本实施例中,所述软质仿体为采用硅胶制成的硅胶仿体2,具有良好的回弹性和触感。
35.当硅胶仿体2受压时,软质凸起起会先和电路板7接触,随着压力增大,触点附近的软质凸起逐渐变形,导电液向四周排开,使得触点附近的导电性能下降,液体电阻增大,从而使触点附近的感知电极点73的分压减小。根据测得电路板7上感知电极点73的电压变化,依据电压变化比例合成对应感知电极点坐标,可以计算出硅胶仿体2在按压时与电路板7的接触位置,即硅胶仿体2上表面触点的位置。
36.作为一种优选实施例,参加图2和图8所示,所述电极点包括若干交错分布的激励电极点72和感知电极点73,所述数据采集装置包括数据采集卡、参考电阻、电容和用于发出激励信号的激励源;
37.所有激励电极点72并联后通过电容串联在激励源上,所述激励源发出矩形脉冲激励电压,经过电容转化为双极性交流电压加载至激励电极点72;
38.每个感知电极点73后连接一个参考电阻,参考电阻另一端接地;由激励电源正极-电容-激励电极点72-液体电阻-感知电极点73-参考电阻-电源负极(接地)形成了完整的电路结构;
39.所述数据采集卡用于采集参考电阻的电压分值。
40.作为一种优选实施例,所述感知电极点73分布在激励电极点72的四周,便于感知电极点73的测量。
41.作为一种优选实施例,参见图3和图4所示,所述电路板7和硅胶仿体2之间为密封空间,还包括用于测量该空间内导电液体压强的压强传感器5,通过压强测量校正通过液体电阻变化得到的硅胶仿体2上的压力大小。当硅胶仿体2表面受压时,内部密封空间变小,导电液压强增大,导通过压强传感器5可以测量导电液的压强变化,结合感知电极点73测量的电压值,经过模型拟合数据,可以计算出触点处的压力大小。
42.作为一种优选实施例,参见图3和图4所示,所述的柔性触觉传感器还包括基座1,所述电路板7安装于基座1上中部,所述硅胶仿体2通过环形压板3压紧在电路板7四周的基座1上。
43.作为一种优选实施例,参见图6所示,所述基座1中部设有用于安装电路板7的安装槽14,安装槽14中部设有向下贯穿的中部通孔12,所述电路板7背面设有与激励电极点72、感知电极点73相连的排针,所述排针置于中部通孔12内,所述电路板7四周与中部通孔12四周的基座1密封相连,以在硅胶仿体2下方形成密封空间。
44.本实施例中,电路板7四周边缘涂有密封胶与基座1粘连,起到密封防漏液的作用。
45.作为一种优选实施例,参见图4和图8所示,所述电路板7是双层印刷电路板7,分为顶层和底层。顶层分布有多个激励电极点72和感知电极点73,激励电极点72和感知电极点73均是直径相同的实心圆,且顶层只有激励电极点72和感知电极点73裸露在外,其余部分均覆盖绿油形成绝缘保护。电路板7底层焊接有电子元件和与外部通信的排针,连接电源之后,可以在激励电极点72处产生双极性矩形脉冲激励电压,底部排针71与感知电极点73并
联,可以测量感知电极点73处的电压。
46.作为一种优选实施例,参见图6所示,所述基座1上设有一圈的密封沟槽11,所述硅胶仿体2底部四周设有能安装在密封沟槽11内的密封凸起21(本实施例为半圆截面密封条),所述环形压板3通过紧固件(比如螺钉4)固定在基座1上,通过密封沟槽11和密封凸起21的配合,在硅胶仿体2与电路板7之间形成密封空间,通过密封沟槽11和密封凸起21的设置,利用了硅胶本身特性提高了密封空间的密封性能,减少外界环境干扰。
47.作为一种优选实施例,参见图3、4和7所示,所述硅胶仿体2中部向上凸起形成触觉部25,触觉部25上表面设有若干半圆截面状条纹23,当物体在硅胶表面滑动时,可以产生震动信号被压强传感器5检测到,不同物体的表面特性不同,产生的震动信号也不相同,因此可以据此判断接触物体的种类。此外,条纹结构还可以增大接触时的摩擦力。
48.作为一种优选实施例,参见图4所示,触觉部25下表面的软质凸起为采用相同材料制成锥尖朝下的棱锥状凸起22,通过设置为棱锥状凸起22提高了凸起的变形能力,间接提高了测量精度。触觉部25四周为与环形压板3配合的压边26,通过压边26的设置提高了对硅胶仿体2固定的牢固性,提高极限环境应对能力。
49.作为一种优选实施例,参见图3和图4所示,所述基座1侧部设有通往密封空间内的压力测量通道16,所述压强传感器5设于压力测量通道16内,测量导电液的压强变化,从而能够校正根据感知电极点73获取的接触压力。作为一种具体安装方式,本发明压力测量通道16延伸到基座1侧部,基座1侧部的压力测量通道16四周设有压强传感器5安装座17,压强传感器5固定在压片6上,压片6通过螺栓固定在压强传感器5安装座17,压强传感器5根部为锥形,当通过螺栓固定压片6时,压强传感器5根部的锥形压紧在压力测量通道16的端部进行密封。
50.作为一种优选实施例,参见图6和图7所示,所述密封沟槽11外侧的基座1上设有至少两个锥形孔18,所述锥形孔18底部通过设有基座1内壁的导电液注射通道15与密封空间内相连,所述硅胶仿体2设有安装在锥形孔18内且与其形状匹配的圆台状凸起24,所述环形板上设有与圆台状凸起24位置和数量对应的穿刺孔31,通过穿刺针从穿刺孔31刺入硅胶仿体2的圆台状凸起24内对密封空间内充放导电液体或者排气,通过该设置无需设置复杂的阀门结构,通过简单的注射器针筒即可完成导电液体的填充,并且能够保证密封空间内充满导电液体。
51.作为一种优选实施例,本发明还提供一种硅胶仿体2的制备方法,首先根据规硅胶仿体2形状设计模具,然后使用3d打印制作出模具,本文设计的模具分为上模具8和下模具9。把上模具8和下模具9拼装在一起,从注射口注入混合之后的硅胶原液,待凝固之后形成特制形状的硅胶仿体2。
52.本发明还提供一种柔性触觉传感器的制备方法,包括如下步骤:
53.步骤1、参见图9所示,根据硅胶仿体2形状和尺寸制备模具,采用硅胶浇注制备硅胶仿体2;
54.步骤2、将电路板7通过胶黏安装在基座1中部,将排针置于基座1的中控槽内;
55.步骤3、将硅胶仿体2覆盖在电路板7上,硅胶仿体2下部的密封凸起21装配在基座1的密封沟槽11内,将环形压板3压紧在硅胶仿体2上,并通过紧固件将环形压板3固定在基体上;
56.步骤4、将一个空心针头从环形压板3上的一个穿刺孔31刺穿圆台状凸起24直至锥形孔18内作为排气管,带有导电液体的注射针头从另一个穿刺孔31刺穿圆台状凸起24直至锥形孔18内注入密封空间内,直至密封空间内充满导电液体,拔掉空心针头和注射针头,完成导电液体的填充;
57.具体的,取两个带有细针管的注射器,分别从圆台状凸起24的位置刺穿仿体硅胶伸入锥形孔18内,一个注射器只保留针管作为排气口,另外一个注射器吸入导电液然后注射进硅胶仿体2下方的密封空间。特别地,触觉传感器内部注射的导电液要完全充满密封空间,不能留有气泡,注射过程中可以通过挤压的方式把气泡从排气通道中挤出。
58.步骤5、将电路板7的电极点通过排针与数据采集装置相连;
59.步骤6、压力标定,使用标准力传感器按压触觉传感器,记录下标准力传感器示数、感知电极点73电压值和压强传感器5测量值,使用模型对数据进行拟合、训练之后得到标定的函数模型,即完成柔性触觉传感器的制备。
60.进一步地,请参考图,制作仿体硅胶的过程为:根据硅胶仿体2的形状设计上模具8和下模具9的结构,使用3d打印制作出模具。把上模具8和下模具9对正拼装,用螺钉4拧紧固定,然后按照1:1的比例混合硅胶原液的a液和b液,充分搅拌之后,再进行去泡处理,去掉硅胶液中的气泡。然后使用针筒注射器从模具的注射口注入硅胶液,当硅胶液从模具另一侧流出时,说明硅胶液已经充满模具内部,停止注射,静置等待硅胶液凝固之后拆开模具,取出成型好的硅胶仿体2。
61.进一步地,请参考图1,下面以一种可能出现的使用情况加以说明:首先组装好触觉传感器,使用注射器往传感器内部密封空间注入导电液。下一步,使用导线连通电路板7上的底部排针71和激励源、数据采集器,给激励源和数据采集器写入程序,控制激励源发出矩形脉冲激励电压,控制数据采集器测量感知电极点73的电压值。然后,对新组装好的触觉传感器进行压力标定:使用标准力传感器按压触觉传感器,记录下标准力传感器示数(即接触力大小)、感知电极点73电压值和压强传感器5测量值,使用模型对数据进行拟合、训练之后得到标定的函数模型。最后,使用时,物体接触到硅胶仿体2上,导致触点附近的感知电极点73处电压发生改变,从而可以计算出触点的位置,再根据标定得到的函数模型,可以计算得到触点的压力大小,从而实现对接触物体的位置和接触力的信息获取。
62.以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。