1.本实用新型涉及夹持装置技术领域,具体是一种工业机器人搬运用的夹持装置。
背景技术:
2.物料搬运机械按功能大致可分为起重机械,输送机,装卸机械,搬运车辆和仓储设备等五类,一般说来,起重机械用于升降和搬运,但搬运距离较短,它的机构作间歇式运动,输送机可连续输送物料,搬运路线一般固定不变,大多用来输送散状物料,装卸机械能自行取物并装卸物料,搬运车辆可灵活安排搬运路线,经济运输距离较长,可在室内或室外作业,具有行驶车轮,仓储设备是在仓库中完成堆、取、储存物料的装置,包括料仓装置,高架仓库和给料机等。
3.在中国专利申请号(cn202021809501.1)公布了一种工业搬运机器人的夹持固定装置,该结构通过齿轮与电机的输出轴固接,使得电机启动时可以带动齿轮转动,通过齿轮与齿条啮合连接以及撑架内侧壁的底部与固定杆的一端固接,且固定杆的另一端固接在限位块上,限位块滑动连接在滑槽内,使得齿条与齿轮啮合连接时,齿条保持在一个水平的位置,夹取物料始终保持水平,使得整体结构保持稳定。但是该结构在使用时安装不方便,且设备通过齿轮、齿条的传动方式,导致设备后期的检修难度提高,因此,本领域技术人员提供了一种工业机器人搬运用的夹持装置,以解决上述背景技术中提出的问题。
技术实现要素:
4.本实用新型的目的在于提供一种工业机器人搬运用的夹持装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种工业机器人搬运用的夹持装置,包括筒体,所述筒体的一端对称铰接有曲杆,两个所述曲杆的对应面活动安装有夹板,所述筒体的内部滑动安装有活塞,所述活塞的一端安装有贯穿筒体的活动杆,所述活动杆的下端安装有压板,所述压板的两侧均铰接有与曲杆活动连接的第一连接杆,所述筒体的外侧靠近一端位置处安装有连接环,所述连接环的外侧等间距设有插槽,且连接环的外侧安装有连接座,所述连接座的内侧安装有与插槽插接的卡头。
6.作为本实用新型更进一步的方案:所述筒体的一端安装有进气管,所述连接座的内部安装有与筒体适配的嵌入环,所述嵌入环的中部位置处开设有与进气管适配的开口。
7.作为本实用新型更进一步的方案:所述夹板的夹持面安装有缓冲垫,所述缓冲垫的表面设有防滑纹。
8.作为本实用新型更进一步的方案:所述曲杆的一侧安装有限位板,所述限位板与夹板之间对称安装有第二连接杆,所述第二连接杆的外部位于夹板与曲杆之间安装有弹簧。
9.作为本实用新型更进一步的方案:所述连接环与筒体之间的间隙形成与嵌入环嵌合的嵌合槽,所述嵌合槽的内部安装有密封垫,所述连接座与嵌入环之间的空隙形成与连
接环适配的连接槽。
10.作为本实用新型更进一步的方案:所述筒体为一种不锈钢材质的构件,且筒体的表面涂有防腐层。
11.与现有技术相比,本实用新型的有益效果是:本实用新型结构简单、设计新颖,通过进气管、筒体的设置,实现设备的驱动,有利于活塞带动活动杆、压板活动,从而带动第一连接杆运动,使得曲杆相向运动,从而实现物品的抓取搬运,通过连接环、插槽与连接座、卡头之间的连接,便于连接座与筒体快速连接,从而有利于设备装卸,减低设备的检修难度。
附图说明
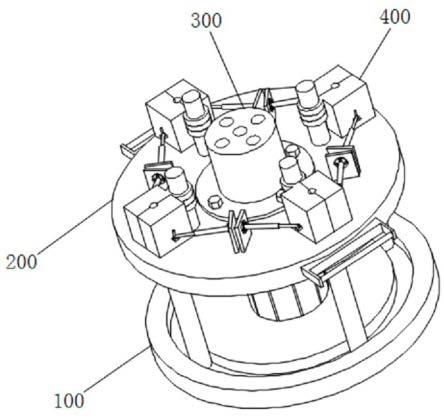
12.图1为一种工业机器人搬运用的夹持装置的结构示意图;
13.图2为一种工业机器人搬运用的夹持装置的内部结构示意图;
14.图3为一种工业机器人搬运用的夹持装置中连接环的结构示意图。
15.图中:1、筒体;2、连接环;3、插槽;4、进气管;5、曲杆;6、活动杆;7、压板;8、第一连接杆;9、限位板;10、第二连接杆;11、夹板;12、连接座;13、连接槽;14、嵌入环;15、卡头;16、弹簧;17、活塞。
具体实施方式
16.请参阅图1~3,本实用新型实施例中,一种工业机器人搬运用的夹持装置,包括筒体1,筒体1的一端对称铰接有曲杆5,两个曲杆5的对应面活动安装有夹板11,筒体1的内部滑动安装有活塞17,活塞17的一端安装有贯穿筒体1的活动杆6,活动杆6的下端安装有压板7,压板7的两侧均铰接有与曲杆5活动连接的第一连接杆8,筒体1的外侧靠近一端位置处安装有连接环2,连接环2的外侧等间距设有插槽3,且连接环2的外侧安装有连接座12,连接座12的内侧安装有与插槽3插接的卡头15,在使用时,通过进气管4实现筒体1的充气、排气,从而实现筒体1内部气压的改变,进一步推动活塞17在筒体1内部活动,从而带动活动杆6伸缩,进一步带动压板7活动,从而带动第一连接杆8运动,使得曲杆5相向运动,从而实现物品的抓取搬运,通过第二连接杆10、夹板11、以及弹簧16的设置,有利于物品夹持时的缓冲,从而提高物品抓取时的稳定性,此外,通过连接环2、插槽3与连接座12、卡头15之间的连接,便于连接座12与筒体1的快速连接,从而有利于设备装卸,减低设备的检修难度。
17.在图1和图2中,筒体1的一端安装有进气管4,连接座12的内部安装有与筒体1适配的嵌入环14,嵌入环14的中部位置处开设有与进气管4适配的开口,有利于筒体1内部气压的改变。
18.在图1中,夹板11的夹持面安装有缓冲垫,缓冲垫的表面设有防滑纹,提高设备抓取时的稳定性。
19.在图1和图2中,曲杆5的一侧安装有限位板9,限位板9与夹板11之间对称安装有第二连接杆10,第二连接杆10的外部位于夹板11与曲杆5之间安装有弹簧16,通过第二连接杆10、夹板11、以及弹簧16的设置,有利于物品夹持时的缓冲,从而提高物品抓取时的稳定性。
20.在图1中,连接环2与筒体1之间的间隙形成与嵌入环14嵌合的嵌合槽,嵌合槽的内部安装有密封垫,连接座12与嵌入环14之间的空隙形成与连接环2适配的连接槽13,便于连接座12与筒体1的快速连接,从而有利于设备装卸,减低设备的检修难度。
21.在图1中,筒体1为一种不锈钢材质的构件,且筒体1的表面涂有防腐层,主要起到耐腐蚀的作用。
22.本实用新型的工作原理是:本实用新型结构简单、设计新颖,在使用时,通过进气管4实现筒体1的充气、排气,从而实现筒体1内部气压的改变,进一步推动活塞17在筒体1内部活动,从而带动活动杆6伸缩,进一步带动压板7活动,从而带动第一连接杆8运动,使得曲杆5相向运动,从而实现物品的抓取搬运,通过第二连接杆10、夹板11、以及弹簧16的设置,有利于物品夹持时的缓冲,从而提高物品抓取时的稳定性,此外,通过连接环2、插槽3与连接座12、卡头15之间的连接,便于连接座12与筒体1的快速连接,从而有利于设备装卸,减低设备的检修难度。
23.以上所述的,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种工业机器人搬运用的夹持装置,包括筒体(1),其特征在于,所述筒体(1)的一端对称铰接有曲杆(5),两个所述曲杆(5)的对应面活动安装有夹板(11),所述筒体(1)的内部滑动安装有活塞(17),所述活塞(17)的一端安装有贯穿筒体(1)的活动杆(6),所述活动杆(6)的下端安装有压板(7),所述压板(7)的两侧均铰接有与曲杆(5)活动连接的第一连接杆(8),所述筒体(1)的外侧靠近一端位置处安装有连接环(2),所述连接环(2)的外侧等间距设有插槽(3),且连接环(2)的外侧安装有连接座(12),所述连接座(12)的内侧安装有与插槽(3)插接的卡头(15)。2.根据权利要求1所述的一种工业机器人搬运用的夹持装置,其特征在于,所述筒体(1)的一端安装有进气管(4),所述连接座(12)的内部安装有与筒体(1)适配的嵌入环(14),所述嵌入环(14)的中部位置处开设有与进气管(4)适配的开口。3.根据权利要求1所述的一种工业机器人搬运用的夹持装置,其特征在于,所述夹板(11)的夹持面安装有缓冲垫,所述缓冲垫的表面设有防滑纹。4.根据权利要求1所述的一种工业机器人搬运用的夹持装置,其特征在于,所述曲杆(5)的一侧安装有限位板(9),所述限位板(9)与夹板(11)之间对称安装有第二连接杆(10),所述第二连接杆(10)的外部位于夹板(11)与曲杆(5)之间安装有弹簧(16)。5.根据权利要求1所述的一种工业机器人搬运用的夹持装置,其特征在于,所述连接环(2)与筒体(1)之间的间隙形成与嵌入环(14)嵌合的嵌合槽,所述嵌合槽的内部安装有密封垫,所述连接座(12)与嵌入环(14)之间的空隙形成与连接环(2)适配的连接槽(13)。6.根据权利要求1所述的一种工业机器人搬运用的夹持装置,其特征在于,所述筒体(1)为一种不锈钢材质的构件,且筒体(1)的表面涂有防腐层。
技术总结
本实用新型涉及夹持装置技术领域,具体是一种工业机器人搬运用的夹持装置,所述筒体的一端对称铰接有曲杆,两个所述曲杆的对应面活动安装有夹板,所述筒体的内部滑动安装有活塞,所述活塞的一端安装有贯穿筒体的活动杆,所述活动杆的下端安装有压板,所述压板的两侧均铰接有与曲杆活动连接的第一连接杆。本实用新型结构简单、设计新颖,通过进气管、筒体的设置,实现设备的驱动,有利于活塞带动活动杆、压板活动,从而带动第一连接杆运动,使得曲杆相向运动,从而实现物品的抓取搬运,通过连接环、插槽与连接座、卡头之间的连接,便于连接座与筒体快速连接,从而有利于设备装卸,减低设备的检修难度。的检修难度。的检修难度。
技术研发人员:张飞 张寿明 李明
受保护的技术使用者:昆明理工大学
技术研发日:2022.03.04
技术公布日:2022/6/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。