1.本公开内容涉及一种用于确定变速器的拖滞力矩系数的方法。本公开内容还涉及对应的变速器系统。
2.根据本公开内容的方法和变速器系统可以例如布置在交通工具中。然而,尽管将主要针对汽车来描述本公开内容,但本公开内容并不限于该特定交通工具,而是也可以安装在另一类型的交通工具中,诸如卡车、公共汽车、越野车、采矿车、农用车辆、作业车辆、海运船只、摩托车等。此外,根据本公开内容的方法和变速器系统还可以布置在固定的传动设备,例如各种工业应用、风力发电机应用等中。
背景技术:
3.在自动变速器领域,如自动步进齿轮交通工具变速器中,要求执行更快、更平稳且更静音的换档。
4.高水平换档过程例如可分为以下阶段。
5.1.力矩缓降
6.2.套筒进入空档
7.3.速度同步
8.4.套筒与齿轮接合
9.5.力矩缓升。
10.驾驶者对换档品质的感知取决于各种因素,诸如,例如从力矩缓降到力矩缓升花费的换档时间以及在换档过程中产生的噪声。而且,变速器的整体可靠性以及寿命也是对驾驶者而言重要的品质因素。
11.为了提供更快、更平稳且更静音的换档,已开发了用于控制诸如同步力矩之类的参数的各种方法以及爪式离合器移位致动器,但是,虽然在本领域中进行了这些活动,但仍然需要能够满足与更快、更平稳且更静音的换档有关的要求的,进一步改进的换档控制。
技术实现要素:
12.本公开内容的目的是提供一种避免了前述问题的,用于确定变速器的拖滞力矩系数的方法。该目的至少部分地通过独立权利要求的特征来实现。
13.根据本公开内容的第一方面,提供了一种用于确定变速器的拖滞力矩系数的方法,该方法包括:执行转速同步,该转速同步包括将同步力矩施加于第一传动构件;以及获取该第一传动构件在该转速同步之前的初始转速、以及该第一传动构件在该转速同步之后的的最终转速,以及用于执行该转速同步的时长。该方法还包括获取与在转速同步期间施加于第一传动构件的同步力矩的水平相关的信息;以及获取与关联于第一传动构件的总转动惯量相关的信息。最后,该方法包括基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与该第一传动构件关联的总转动惯量来确定该拖滞力矩系数。
14.根据本公开内容的第二方面,提供了一种变速器系统,该变速器系统包括电子控制单元和包括第一可旋转传动构件的变速器,其中,该电子控制单元被配置成用于,在执行包括对第一传动构件施加同步力矩的转速同步时:获取该第一传动构件在该转速同步之前的初始转速、以及该第一传动构件在该转速同步之后的最终转速,以及用于执行该转速同步的时长。该电子控制单元还被配置成用于获取与在转速同步期间施加于第一传动构件的同步力矩的水平相关的信息;以及获取与关联于第一传动构件的总转动惯量相关的信息。该电子控制单元还被配置成用于基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与该第一传动构件关联的总转动惯量来确定该拖滞力矩系数。
15.以这种方式,可以获取当前拖滞力矩系数的准确值,而无需执行变速器的任何特别修改的操作例程,诸如允许变速器的飞轮传动构件缓慢减速,而不受同步力矩的影响,即,仅由于拖滞力矩而被导致减速,以用于识别拖滞力矩系数。
16.这种特别修改的操作例程通常与变速器的正常操作条件不兼容,因此必须在相对不常见的操作条件下进行,否则驾驶员必须接受由变速器执行传动构件的缓慢惯性转动减速而引起的正常驾驶行为中频繁的非期望干扰,此种不常见的操作条件允许惯性转动的传动构件的此种缓慢减速在不被驾驶员注意到的情况下执行,因此只提供拖滞力矩系数的零星数据。
17.换言之,根据本公开内容的方法和系统使得能够频繁地识别当前拖滞力矩系数,并且还将拖滞力矩系数映射为变速器操作温度的函数,从而可以执行快速、平稳且静音的换档。与针对各种操作条件的拖滞力矩系数相关的大量数据还实现其他功能,例如与变速器和/或动力系维护需要、变速器润滑油状态、变速器滚柱轴承状态等有关的有充分根据的建议。
18.此外,用于识别拖滞力矩系数的过程可以在不被驾驶员注意到的情况下进行,并且不影响交通工具的驾驶行为。
19.通过实施从属权利要求中的一个或若干个特征来实现更多优点。
20.在一些示例性实施方式中,在包括转速同步的换档过程已结束之后,执行基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与第一传动构件关联的总转动惯量来确定拖滞力矩系数的步骤。因此,由于可以在任何时间虚拟地执行基于从换档事件检测和获取的数据来实际识别拖滞力矩系数的搜索算法,所以可以在适当的低时间点由变速器控制器或具有可用计算能力的一些其他cpu离线进行这种执行操作。
21.在一些示例性实施方式中,确定该拖滞力矩系数的步骤包括利用以该拖滞力矩系数、该第一传动构件在该转速同步之前的初始转速、该第一传动构件在该转速同步之后的最终转速、用于执行该转速同步的时长、施加的同步力矩的水平以及与该第一传动构件关联的总转动惯量作为项的方程式。由此,在确定拖滞力矩系数时,将描述同步过程的主要参数考虑在内,使得可以以高精度确定拖滞力矩系数。
22.在一些示例性实施方式中,确定拖滞力矩系数的步骤涉及应用搜索算法,特别是二分搜索算法来识别拖滞力矩系数。由此,可以以高精度快速地确定拖滞力矩系数,而不需要高的计算资源或存储器资源。
23.在一些示例性实施方式中,应用二分搜索算法包括:第一步骤,将所述拖滞力矩系数的值设定为等于初始拖滞力矩系数值;第二步骤,基于以拖滞力矩系数、第一传动构件的初始转速、第一传动构件的最终转速、用于执行转速同步的时长、所获取的同步力矩水平和所获取的转动惯量水平作为项的方程式,计算以下项之一的值:第一传动构件的初始转速、第一传动构件的最终转速、用于执行所述转速同步的时长、同步力矩的水平、以及与第一传动构件关联的总转动惯量。此外,应用二分搜索算法还包括:第三步骤,计算误差值;该误差值等于所述项获取值与所述项的计算值之间的差;第四步骤,将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差容限时终止所述二分搜索算法;以及第五步骤,将所述项获取值与所述项的计算值进行比较,据此相应地调整所述拖滞力矩系数的值,并继续重复所述二分搜索算法的第二步骤至第五步骤。二分搜索算法为以高精度识别拖滞力矩系数提供了一种快速且高效的解决方案。
24.在一些示例性实施方式中,应用二分搜索算法包括:第一步骤,将所述拖滞力矩系数设定为等于初始拖滞力矩系数值;第二步骤,基于也以所述拖滞力矩系数、所获取的所述第一传动构件的初始转速、所获取的用于执行所述转速同步的时长、所获取的同步力矩水平和所获取的转动惯量水平作为项的方程式,计算所述第一传动构件的最终转速;第三步骤,计算误差值,所述误差值等于所获取的最终转速和计算得到的最终转速之间的差;第四步骤,将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差容限时终止所述二分搜索算法;以及第五步骤,将所获取的最终转速与计算得到的最终转速进行比较,据此相应地调整所述拖滞力矩系数的值,并继续重复所述二分搜索算法的第二步骤至第五步骤。
25.通过使用参数“第一传动构件的最终转速”来比较所计算的值和所获取的值,提供了作为第一传动构件的最终转速的函数的具有直观形状的拖滞力矩系数的直接解,并且其中,用于计算第一传动构件的最终转速的方程式是容易获取的。
26.在一些示例性实施方式中,所述第一步骤还包括将拖滞力矩系数上限设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限设定为等于初始拖滞力矩系数下限,以及将所述初始拖滞力矩系数设在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围内,特别是在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的所述范围的中间处,并且第五步骤包括将所获取的最终转速与计算得到的最终转速进行比较,其中,当在减档(降档)期间所获取的最终转速小于计算得到的最终转速时,或者当在加档(升档)期间所获取的最终转速大于计算得到的最终转速时,将所述拖滞力矩系数下限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由该拖滞力矩系数上限和该拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤,并且其中,当在减档期间所获取的最终转速大于计算得到的最终转速时,或者当在加档期间所获取的最终转速小于计算得到的最终转速时,将所述拖滞力矩系数上限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤。
27.用于执行包括对拖滞力矩系数的范围进行迭代减半,然后调整拖滞力矩系数以使其位于新范围中心的二分搜索算法的此种方法导致快速有效地识别具有可接受误差值的拖滞力矩系数。
28.在一些示例性实施方式中,在二分搜索算法的第二步中,使用以下等式执行最终转速的计算。
29.其中
[0030][0031]
ω0=第一传动构件的初始转速,
[0032]
t=同步力矩,
[0033]bmid
=拖滞力矩系数,
[0034]
tf=同步时长,
[0035]
j=与第一传动构件关联的总转动惯量。
[0036]
在一些示例性实施方式中,应用二分搜索算法包括:第一步骤,将所述拖滞力矩系数设定为等于初始拖滞力矩系数值;第二步骤,基于也以所述拖滞力矩系数、所获取的所述第一传动构件的初始转速、所获取的所述第一传动构件的最终转速、所获取的所述同步力矩的水平和所获取的转动惯量的水平作为项的方程式,计算用于执行所述转速同步的时长;第三步骤,计算误差值;所述误差值等于所获取的用于执行所述转速同步的时长与所计算的用于执行所述转速同步的时长之间的差;第四步骤,将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差容限时终止所述二分搜索算法;以及第五步骤,将所获取的用于执行转速同步的时长与所计算的用于执行转速同步的时长进行比较,据此相应地调整拖滞力矩系数的值,并继续重复二分搜索算法的第二步骤至第五步骤。
[0037]
通过使用参数“用于执行转速同步的时长”来比较所计算的值和所获取的值,提供了作为用于执行转速同步的时长的函数的拖滞力矩系数的具有直观形状的直接解,其中,用于计算用于执行转速同步的时长的方程式是容易获取的。
[0038]
在一些示例性实施方式中,所述第一步骤还包括将拖滞力矩系数上限设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限设定为等于初始拖滞力矩系数下限,以及将所述初始拖滞力矩系数设在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围内,特别是在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的所述范围的中间处;并且第五步骤包括将所获取的用于执行所述转速同步的时长与所计算的用于执行所述转速同步的时长进行比较,并且其中,当在减档期间所获取的用于执行所述转速同步的时长小于所计算的用于执行所述转速同步的时长时,或者当在加档期间所获取的用于执行所述转速同步的时长大于所计算的用于执行所述转速同步的时长时,将所述拖滞力矩系数下限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤,并且其中,当在减档期间所获取的用于执行所述转速同步的时长大于所计算的用于执行所述转速同步的时长时,或者当在加档期间所获取的用于执行所述转速同步的时长小于所计算的用于执行所述转速同步的时长时,将所述拖滞力矩系数上限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤。
[0039]
用于执行包括对拖滞力矩系数的范围进行迭代减半,然后调整拖滞力矩系数以使其位于新范围中心的二分搜索算法的此种方法导致快速有效地识别具有可接受误差值的拖滞力矩系数。
[0040]
在一些示例性实施方式中,在二分搜索算法的第二步中,使用以下等式执行时长的计算。
[0041]
其中
[0042][0043]
ω0=第一传动构件的初始转速
[0044]
t=同步力矩
[0045]bmid
=拖滞力矩系数
[0046]
ωf=第一传动构件的最终转速
[0047]
j=与第一传动构件关联的总转动惯量。
[0048]
在一些示例性实施方式中,该方法包括将初始拖滞力矩系数上限设定为等于同步力矩除以所获取的最终转速,并将初始拖滞力矩系数下限设定为等于零。因此,覆盖了拖滞力矩系数的整个可行范围,使得该算法可以以低的误差值确定地朝着拖滞力矩系数收敛。
[0049]
本公开内容还涉及一种用于控制变速器的转速同步的方法,其中,该方法包括:在如上所述的第一转速同步期间确定变速器的拖滞力矩系数;基于所确定的拖滞力矩系数来校准变速器控制软件;以及借助于经校准的变速器控制软件来控制变速器随后的第二转速同步。由此,新识别的拖滞力矩系数的实际实现方式和使用可以以直接且有效的方式进行。
[0050]
本公开内容还涉及一种电子控制单元,该电子控制单元包括构造成执行如上所述的方法的处理器。
[0051]
本公开内容还涉及包括指令的计算机程序,当由计算机执行该程序时,该指令使得计算机执行如上所述的方法。
[0052]
本公开内容还涉及包括指令的计算机可读储存介质,当由计算机执行该指令时,该指令使得计算机执行如上所述的方法。
[0053]
在一些示例性实施方式中,变速器是包括多个驱动齿轮的步进齿轮变速器。
[0054]
本公开内容还涉及一种用于混合动力电动或电动交通工具的动力传动系,该动力传动系包括如上所述的变速器系统,以及与该变速器驱动地连接的电动推进马达。
[0055]
本公开内容还涉及一种交通工具,其包括如上所述的数据处理控制单元、或变速器系统或动力传动系。
[0056]
当研究所附权利要求和以下描述时,本发明的其他特征和优点将变得显而易见。本领域技术人员意识到,在不脱离本公开内容的范围的情况下,本公开内容的不同特征可组合以创造出除上文和下文中明确描述的实施方式之外的实施方式。
附图说明
[0057]
下面将参照附图详细地描述本公开内容,在附图中,
[0058]
图1示意性地示出了具有变速器的交通工具,
[0059]
图2a-2c示意性地示出了包括变速器的传动系的三个不同示例性实施例,
[0060]
图2d示意性地示出了套筒齿和齿轮齿的匹配位置,
[0061]
图3a-3c示意性地示出了变速器中齿轮的脱离接合、空档和接合的顺序,
[0062]
图4示意性地示出了在用于加档的同步过程期间齿轮的转速分布,
[0063]
图5示意性地示出了拖滞力矩系数对用于执行同步过程的时长的影响,
[0064]
图6示意性地示出了在用于减档的同步过程期间齿轮的转速分布,
[0065]
图7示意性地示出了拖滞力矩系数的端值,
[0066]
图8示出了用于识别拖滞力矩系数的搜索算法的示例性实施例,
[0067]
图9示意性地示出了图8的搜索算法的执行的示例,
[0068]
图10示出了用于识别拖滞力矩系数的方法的基本步骤的示例性实施例,
[0069]
图11示出了用于识别拖滞力矩系数的方法的步骤的另一示例性实施例,并且
[0070]
图12示出了用于控制变速器的转速同步的示例性实施例。
具体实施方式
[0071]
下面将结合附图描述本公开内容的各个方面,以例示而非限制本公开内容,其中,类似的附图标记表示类似的元件,且所描述的方面的变型不限于具体示出的实施例,而是能够应用于本公开内容的其他变型。
[0072]
本公开内容涉及一种用于确定变速器的拖滞力矩系数的方法。因此,可以使用并且实现对与在变速器中提供快速、平稳且静音的换档有关的各种构件的改进的控制,因为,在知晓拖滞力矩系数的情况下,当施加某一已知同步力矩时,可以更准确地估计将与另一传动构件的转速同步的传动构件的所产生的旋转加速度。
[0073]
换言之,例如,如果为变速器控制器提供了如下控制策略,该控制策略将已知的所施加的同步力矩考虑在内,计算开始同步时长的合适时间点和/或在同步时长开始时两个传动构件的合适的相对旋转位置,在一达到同步转速时,就立即导致所述两个传动构件的犬齿的期望对准,使得在一达到同步转速时,就可以立即进行几乎无干涉的齿轮接合,那么了解当前拖滞力矩系数是有价值的,因为这能够进一步提高所述时间点和/或相对起始位置的计算精度,从而提供更快、更平稳且更静音的齿轮接合。
[0074]
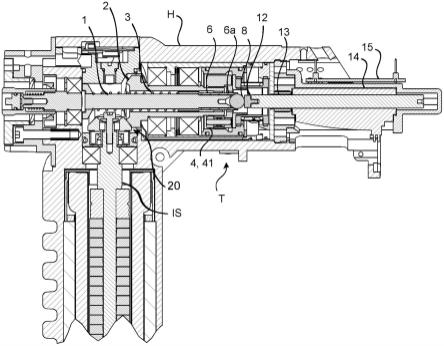
为了在上下文中描述确定变速器的拖滞力矩系数的方法,首先参考图1,图1示出了具有推进动力源2诸如内燃发动机和/或电动马达的汽车1的示例性实施例,推进动力源2通过多档变速器,即,具有多个离散档的变速器,与汽车的驱动轮3驱动地连接,其中,各档具有唯一的齿轮比。显然,根据本公开内容的方法不限于前轮驱动汽车的变速器,甚至完全不限于汽车,而是可以有利地在许多其他类型的多级变速器和许多其他类型的应用中实现。
[0075]
图2a示出了自动手动变速器atm的传动系4的两档变速器6的示意图。传动系包括作为推进源的电动马达2b、变速器6和一组驱动轮3。根据该示例性实施例的变速器具有主驱动轴7、输入驱动轴8、具有第一齿轮比的常啮合第一齿轮9、具有第二齿轮比的常啮合第二齿轮10。
[0076]
第一齿轮9包括第一齿轮31,该第一齿轮31旋转地固连于输入轴8,并与布置在所述主轴7上且能够相对于所述主轴7旋转的飞轮第二齿轮32常啮合,并且第二齿轮10包括第
三齿轮33,该第三齿轮33旋转地固连于输入轴8,并与布置在所述主轴7上且能够相对于所述主轴7旋转的飞轮第四齿轮34常啮合。
[0077]
设置在主轴7上并通过轮毂19旋转地固连于主轴7的可轴向移动的移位套筒18包括一组套筒齿,也称为犬齿或简称犬,它们可以借助于移位致动器12沿移位方向25双向轴向移位,以用于接合第一常啮合齿轮9和第二常啮合齿轮10的相关联的第二齿轮32和第四齿轮34中的任一者的对应齿、犬齿或简称犬,以用于选择性地改变输入轴8和主轴7之间的总齿轮比。
[0078]
图2d示意性地示出了处于脱离接合状态的具有一组套筒齿26的移位套筒18和具有一组对应齿27的第二齿轮32的示例性实施例。当移位套筒18旋转时,套筒齿26沿移位套筒的周向方向28移动,并且当第二齿轮32旋转时,对应的齿27沿第二齿轮32的周向方向29移动。移位套筒18能够在轴向方向30上轴向移动,使得套筒齿26可进入由第二齿轮32的相邻对应齿27限定的凹槽35,如以虚线表示的处于接合状态的移位套筒18*例示的那样。
[0079]
例如变速器控制器的电子控制器20用于控制变速器6的操作,特别是移位致动器12的操作。如图2所示,相同的控制器20还可以被设为控制电力转换器21的操作,例如逆变器,该电力转换器21被设为控制从高压电池22提供给电动马达2b的电压和电流。或者,可以使用更分布式的系统,其中传输控制器与之通信连接的单独的电子控制器可以用于控制电源2b。
[0080]
显然,所示的两档变速器纯粹是许多可能的和可选的布局的一个示例,并且本公开内容的方法和系统可应用于许多其他类型的变速器,例如三档至多但不限于九档变速器,或者甚至例如至多25档变速器,并且变速器可以例如是传统和混合双离合器变速器(dct和dcth)或自动手动变速器(amt)。
[0081]
变速器还可以在许多不同类型的传动系中实现,例如如图2b中示意性示出的,具有燃烧发动机2a作为主要动力源的常规燃烧动力传动系,或者如图2c中示意性示出的具有燃烧发动机2a和电动马达2b作为用于推进交通工具的动力源的混合动力系。在此种情况下,可以提供摩擦离合器5以用于实现选择性的纯电动驱动模式。
[0082]
总之,用于确定变速器的拖滞力矩系数的方法不限于交通工具变速器,并且可以有利地或可替代地在其他类型的变速器中实现或使用。
[0083]
例如,多级变速器的高水平换档过程可分为以下阶段。
[0084]
1.力矩缓降
[0085]
2.套筒进入空档
[0086]
3.速度同步
[0087]
4.套筒与齿轮接合
[0088]
5.力矩缓升。
[0089]
图3a到图3c示出了图2a到2c的示意性示例变速器的齿轮加档。为了简化,图3a到3c仅示出了图2a到图2c的变速器的一部分,其中,图3a示出了第一齿轮9接合,即,移位套筒18与飞轮第二齿轮32和主轴7进行力矩传递连接的变速器。
[0090]
图3b示出了在移位套筒18已轴向地移动到空档状态时的状态,即,移位套筒18与飞轮第二齿轮32和飞轮第四齿轮34都断开连接的状态下的变速器。由于飞轮第二齿轮32和飞轮第四齿轮34都通过第一齿轮31和第三齿轮33和输入轴8相互旋转,如图2a-2c所示,因
为第一齿轮9和第二齿轮10的不同齿轮比,第二齿轮10的飞轮第四齿轮34具有比第二齿轮9的飞轮第二齿轮34高的转速。因此,必须在移位套筒18能够与第四齿轮34接合之前,降低飞轮第四齿轮34的转速。第四齿轮34的转速变得同步的过程,即转速被调整为与移位套筒的转速相同的过程称为转速同步,或简称同步。
[0091]
可以通过许多不同的方式来执行该同步。例如,同步力矩可以直接施加于第四齿轮34,或者经由旋转地连接于第四齿轮34的任何传动构件间接地施加于第四齿轮34。在图2a的示例变速器中,同步力矩因此可施加于齿轮31到齿轮34、输入轴8以及电动马达2b的转子中的任一者。
[0092]
例如,同步力矩可以通过将移位套筒18的滑动表面被轴向压靠在齿轮34的对应滑动表面上来提供,其中,所得到的同步力矩的值取决于诸如轴向接触压力、摩擦表面尺寸、移位套筒18的摩擦表面材料等参数。该方法涉及将同步力矩直接施加于第四齿轮34。
[0093]
可替代地或组合地,可控制图2a的电动马达以产生去往输入轴8的同步力矩,其中,对电动马达2b提供的电流和/或电压水平可用于计算由电动马达提供的所产生的同步力矩。该方法包括间接地施加的同步力矩。
[0094]
还可替代地,可将图2c的离合器5控制为接近一定程度,以用于经由输入轴8产生去往第四齿轮34的同步力矩。在此种情况下,所产生的同步力矩的值取决于离合器5的轴向接触压力等参数。
[0095]
不管用于产生同步力矩的方法如何,施加于第四齿轮34的同步的水平可认为是已知的,并且可在用于识别拖滞力矩系数的方法和系统中方便地使用。
[0096]
当达到旋转同步速度时,即,当移位套筒18和第四齿轮34以相同的速度旋转时,将移位套筒18轴向移位,使得移位套筒18的犬式离合器齿可以进入位于第四齿轮34的相邻犬齿之间的凹槽中,从而在第四齿轮34和主轴7之间提供力矩传递连接。
[0097]
用于计算拖滞力矩系数的数据是基于从变速器的至少一个实际换档过程中获取的数据进行计算的,该至少一个实际换档过程诸如变速器加档,即如图4中示意性地例示的,从第一档9换档到第二档10,或者变速器减档,即如图6中示意性地例示的,从第二档10齿轮换档到第一档9,。
[0098]
实际上,由于在实际换档过程中仅首先登记相关参数值所需的低数据处理能力,以及随后的,基于所登记的参数值对拖滞力矩系数的离线(非实时)识别,可以相对频繁地执行换档期间的数据收集,以用于针对各种变速器操作条件(诸如各种变速器油温)提供拖滞力矩系数的可靠估计。
[0099]
图4示出了x轴为时间(秒)且y轴为转速(弧度/秒)的图表,第一绘制线40示出了在加档期间要同步的即将到来的第四齿轮32的转速的示意性示例,并且第二绘制线41示出了在所述加档期间的移位套筒18的转速。
[0100]
特别地,在时长t1期间,第一齿轮9仍然接合,动力源提供推进力矩,并且移位套筒18和第二齿轮32的转速都增大,从而导致交通工具加速。
[0101]
在时长t1结束时,变速器控制器开始换档到第二档10。因此,在接下来的第二时长t2期间,首先取消推进力矩,然后通过使移位套筒18轴向远离第二齿轮32移动,使移位套筒的犬齿26和第二齿轮32的犬齿27脱离,从而使第一齿轮9脱离。
[0102]
此时,移位套筒18的转速41仍然与第二齿轮32的转速相同,并且即将到来的第四
齿轮34的转速40更高,如图4所示。
[0103]
然而,在随后的第三时长t3(也称为同步时长)期间,将同步力矩施加于第四齿轮34,使得即将到来的第四齿轮34的转速40迅速减小。例如,在第三时长t3期间恒定的同步力矩可以通过移位套筒18的借助于移位致动器12而被轴向压靠在第四齿轮34上的摩擦表面来施加。
[0104]
在第三时长t3结束时,第四齿轮34的转速40已达到移位套筒18的转速41。变速器控制器20可优选地布置成在第一时长t3期间(包括第三时长t3的起始点)控制同步过程,使得在第三时长t3结束时,移位套筒18和第四齿轮34的相对旋转位置能够使移位套筒18立即轴向移位运动进入接合状态,而在移位套筒18的犬齿与第四齿轮34的对应犬齿之间没有干涉。
[0105]
移位套筒18的犬齿26与第二齿轮32或第四齿轮34的对应犬齿27之间的干涉意味着在移位套筒18达到完全接合状态之前,在所述犬齿26、犬齿27之间存在相互接触,如图2d中虚线示出的移位套筒18*所示。
[0106]
换言之,传输控制器20可布置成应用控制策略,该控制策略涉及计算同步周期t3的适当起始点,该起始点导致在第四齿轮34的转速40达到移位套筒18的转速41的时刻,移位套筒18的齿与第四齿轮34的相邻齿之间的对应凹槽的相匹配的角位置,从而可以在没有非期望的相互齿干涉的情况下立即执行移位套筒18与第四齿轮34之间的齿轮啮合,因为由此可以更快、更平滑且更静音地执行齿轮接合。
[0107]
特别地,当(但非仅当)控制策略涉及一达到同步转速时就立即使移位套筒18的轴向位移成与第四齿轮34力矩接合时,准确地知晓拖滞力矩系数是有利的,因为这使得能够在施加特定同步力矩t时更准确地估计第四齿轮34的所得的角加速度αg。
[0108]
例如,在图5中示意性地示出了拖滞力矩系数对同步时长“t
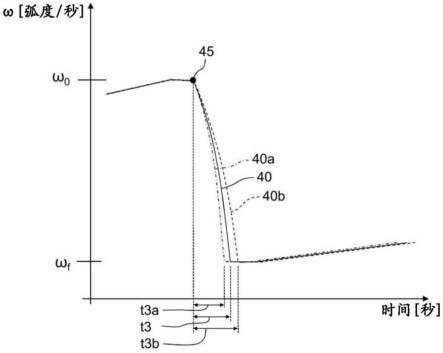
f”的影响,其中,基于拖滞力矩系数的第一值,实线40对应于在图4的加档的同步过程期间第四齿轮34的随时间变化的转速绘图,从而提供第一同步时长t3。
[0109]
图5还包括点划线40a,该点划线40a对应于在图4的加档的同步过程期间第四齿轮34的随时间变化的转速绘图,其基于拖滞力矩系数的比第一值高的第二值,从而提供比第一同步时长t3短的第二同步时长t3a。
[0110]
最后,图5还包括点线40b,该点线40b对应于在图4的加档的同步过程期间第四齿轮34的随时间变化的转速绘图,其基于拖滞力矩系数的比第一值低的第三值,从而提供比第一同步时长t3长的第三同步时长t3b。
[0111]
图5中的所有绘图都假定同步力矩恒定且相同的。
[0112]
因此,很明显,拖滞力矩系数是用于获取变速器的快速、平稳且静音的换档的相关参数。例如,拖滞力矩系数是用于计算施加同步力矩的适当起始点45的相关参数,对该起始点45进行选择以产生移位套筒18的犬齿和第四齿轮34的相邻犬齿之间的凹槽的匹配的相对旋转位置,使得可以在没有非期望的相互干涉的情况下执行随后的齿轮齿接合。
[0113]
在不知晓拖滞力矩系数的情况下,可以在基于模型的控制策略中使用恒定的拖滞力矩td,但这不会提供与使用依赖于转速的拖滞力矩时相同的精度,因此可能导致不太快、不太平稳且不太静音的换档。
[0114]
如上所述,在图4和图5的示例中,同步力矩t在第三时长t3、t8期间施加,并且其具
有与第三时长t3、t8的长度对应的长度,第三时长t3、t8对应于同步时长tf。
[0115]
某齿轮的拖滞力矩可通过以下计算,
[0116]
td=b
×
ω
[0117]
其中b=拖滞力矩系数,即恒定摩擦系数,并且ω=齿轮的转速。
[0118]
飞轮齿轮的所得的角加速度αg对于加档是通过
[0119]
αg=(-t
synch-(b
×
ω))
÷j[0120]
对于加档,并且对于减档是通过
[0121]
αg=(t
synch-(b
×
ω))
÷j[0122]
计算的,其中j是与齿轮关联的总惯量,t
synch
是同步力矩,在本文中也称为“t”,并且td是拖滞力矩。
[0123]
变速器中的拖滞力矩可称为变速器中的内部旋转阻力,其例如是由轴承中的摩擦损失、变速器中的油引起的搅动、传动中的油引起的空气摩擦、齿轮啮合等引起的。
[0124]
为了确定与齿轮关联的总惯量j,必须考虑到变速器的旋转连接于齿轮的所有旋转构件。具体而言,在确定与齿轮关联的总转动惯量时,必须考虑可旋转地连接于齿轮的各单独可旋转部分的转动惯量,以及齿轮与各单独可旋转部分之间的齿轮比n。
[0125]
因此,由于电动马达的转子和移位套筒18的转动惯量不同,j的计算取决于是与移位套筒18同步还是与电动马达同步。
[0126]
作为示例,在图2a到图2c中的任一者的示例性变速器中,与第四齿轮34关联的总转动惯量对应于旋转地连接于第四齿轮34的所有传动构件(即,根据图2a到图2c:第一齿轮31、第二齿轮32和第三齿轮33、输入轴8和旋转连接于输入轴8的动力源2a和动力源2b的所有旋转部件)的组合转动惯量,因为所有这些部件都永久地旋转连接。
[0127]
再次参考图4,在第四时长t4期间,移位套筒轴向移动以与第四齿轮34旋转连接和接合,并且推进力矩可以缓升,使得交通工具可以在随后的第五时长t5期间继续加速。
[0128]
此外,图6示出了对应图表,其包括第一绘制线42和第二绘制线43,该第一绘制线42例示在减档期间要同步的即将到来的第二齿轮32的转速的示意性示例,并且第二绘制线43例示在所述减档期间的移位套筒18的转速。
[0129]
具体而言,在第一时长t6期间,第二齿轮10仍然接合,不提供推进力矩,并且移位套筒18和第四齿轮34二者的转速都减小,从而导致交通工具减速。
[0130]
在第一时长t6结束时,变速器控制器20开始减档至第一档9。因此,在接下来的第二时长t7期间,通过使移位套筒轴向移动来使第二齿轮10脱离,由此移位套筒18的犬齿与第四齿轮34脱离。
[0131]
此时,移位套筒18的转速43仍然与第四齿轮34的转速相同,并且即将到来的第二齿轮32的转速42更低,如图6所示。
[0132]
然而,在随后的第三时长t8期间,将同步力矩施加于第二齿轮32,使得即将到来的第二齿轮32的转速迅速增大。在第三时长t8期间恒定的同步力矩可以例如经由图2a和图2c所示的电动马达2b来施加。
[0133]
在第三时长t3结束时,第二齿轮32的转速42已达到移位套筒18的转速43。变速器控制器20可优选地布置成在第三时长t8期间(包括第三时长t8的起始点)控制同步过程,使得在第三时长t8结束时,移位套筒18和第二齿轮32的相对旋转位置能够使移位套筒18立即
进行轴向移位运动,而在移位套筒18的犬齿26与第二齿轮32的对应犬齿27之间没有干涉。
[0134]
在第四时长t9期间,移位套筒18轴向地移动以与第二齿轮32旋转连接且接合,并且交通工具可以在随后的第五时长t10期间继续减速。
[0135]
下面提供用于识别拖滞力矩系数“b”的示例方法的详细说明。
[0136]
假设具有惯量“j”的物体正以转速“ω”旋转。当转动力矩“t”施加于该物体时,描述该物体的微分方程式可以写成:
[0137][0138]
其中,“b”是拖滞力矩系数,并且项“bω”是拖滞力矩td。
[0139]
如果没有拖滞力矩,那么方程式(1)可以写成:
[0140][0141]
方程式(1)的解可以写成:
[0142][0143]
方程式(3)表示,当对具有初始转速“ω
0”的物体施加恒定的转动力矩“t”时,物体的转速“ω”随时间的演变。
[0144]
如果对初始转速为ω0的物体施加恒定的转动力矩“t”,那么该物体在同步时长“t
f”之后达到一定的转速“ω
final”(也示为“ω
f”),该时间周期“t
f”可通过方程式(3)计算为:
[0145][0146]
方程式(3)中的拖滞力矩系数“b”是未知的,但方程式(3)不能解成如下形式:
[0147]
b=(t,j,t,ω(t),ω0)的函数
ꢀꢀꢀ
(5)
[0148]
因此,本公开内容提供了用于识别“b”的备选方法。假设在多档变速器中的换档过程,例如在正常驾驶期间,或在下线检测(end-of-line test)和校准期间,其中,在同步过程期间,在所施加的恒定转动力矩“t”的影响下,使具有惯量“j”的物体在同步时长“t
f”内将转速从ω0改变到ωf。方程式(3)可以写成:
[0149][0150]
如果在所述同步过程期间,例如通过转速传感器和与变速器关联的控制单元获取了初始转速“ω
0”、最终转速“ω
f”和同步时长“t
f”的值,并且如果已知物体的转动惯量并且已知或可以获取所施加的转动力矩,那么只有拖滞力矩系数“b”是未知的。
[0151]
在分析“b”的极限值时,即:
[0152]
b∈[
bmin
,b
max
]
ꢀꢀꢀ
(7)
[0153]
显而易见,下限b
min
将为零,这对应于变速器中完全缺乏拖滞力矩的情况:
[0154]bmin
=0
ꢀꢀꢀ
(8)
[0155]
如果b=b
min
=0,那么方程式(1)变为方程式(2),即,
[0156]
方程式(2)的解是:
[0157][0158]
因此,当b=b
min
时,方程式(9)给出:
[0159][0160]
另一方面,“b”的最大值将高度对应于摩擦力,以至于惯量j达到ωf需要无限长时间。
[0161]
因此,如果方程式(4)中tf=∞,那么因为ln(0)是未定义的,因此导致:
[0162]
因此,方程式(7)可以写成:
[0163][0164]
此外,如果b=b
max
,那么在一段时间后,在同步过程中获取的有限tf,转速ω
f_min
可以通过方程式(6)计算为:
[0165][0166]
因此,方程式(11)、(12)和(10)给出了“b”从0移动到并且ωf从ω
f_max toω
f_min
移动,如图7中通过端点50、51所描绘的。
[0167]
从图7和方程式(6)可以得出,“b”和ωf形成了排序数组,这意味着当“b”增大时ωf减小。
[0168]
因此,可以有利地将搜索算法用于识别“b”的值,该“b”的值对应于如上所述在交通工具驾驶期间实际换档的同步过程期间获取的ωf的测量值。
[0169]
例如,可以使用所谓的二分搜索算法来识别“b”。二分搜索算法又称折半搜索算法,并且是一种在排序数组内查找目标值位置的搜索算法。
[0170]
图8中示出了描述适于识别拖滞力矩系数“b”的二分搜索算法的示例的流程图。
[0171]
在算法的初始化阶段81中,定义和设置各种参数。例如,根据方程式(11),b
high
和b
low
定义“b”的不断缩小的边界,并用b
max
和0初始化。
[0172]
参数b
mid
定义由端值b
high
和b
low
定义的范围内的中心点。
[0173]
可以通过将称为“iteration lim”的变量设定为等于值n来设置最大迭代次数。当设置n=50时,算法一定不会执行超过50次迭代,并且变量“iteration#”可以设为“1”以用于追踪迭代的次数。
[0174]
该算法将继续迭代,直到最终转速ωf的计算值足够接近ωf的测量值。这是通过设置变量“ω
f_error bound”来控制的,该变量定义ωf的计算值和ωf的测量值之间的可接受偏差,等于某个值“e”。
[0175]
指定当前误差值并称为“ω
f_error
””
的操作变量初始设为大于“e”,以用于确保初始误差大于可接受的值。
[0176]
在初始化之后,执行第一误差评估82,其包括将当前误差值“ω
f_error”与“ω
f_error bound”进行比较。如果当前误差值“ω
f_error”小于由“ω
f_error bound”定义的可接受值,则认为找到了足够准确的“b”值,并且步骤83中的算法呈现出结果“b”=“b
mid”并终止该算法。
[0177]
否则,执行第二评估84,其涉及将变量“iteration#”的当前值与变量“iteration lim”进行比较。如果当前迭代次数“iteration#”大于最大迭代次数“iteration lim”,则认为找到了足够准确的“b”值,并且步骤83中的算法呈现结果“b”=
“”
并终止该算法。
[0178]
第二评估步骤84可以从算法中省略,因为其在某些情况下存在引起无限循环的风险。此外,可以改变第一评估步骤82和第二评估步骤84的顺序。
[0179]
如果当前误差值“ω
f_error”大于如“ω
f_error bound”所定义的可接受值,并且如果当前迭代次数“iteration#”小于最大迭代次数“iteration lim”,则该算法进行到计算步骤85,该步骤85包括首先基于作为拖滞力矩系数的“b
mid”、在所获取的同步时长“t
f”期间施加的所获取的恒定同步力矩“t”、与齿轮关联的恒定总旋转惯量“j”和所获取的起始转速“ω
0”,计算齿轮的最终转速“ω
f_bmid”。
[0180]
所获取的恒定同步力矩“t”的值可以例如通过检测移位套筒致动器的轴向致动器力,或者通过检测用于施加同步力矩的电动马达的电流和/或电压水平来获取。
[0181]
所获取的同步时长“t
f”可以例如通过读取同步周期开始时的时间点和同步周期结束时的时间点,并计算差值来获取。
[0182]
所获取的与齿轮关联的恒定总旋转惯量“j”可以例如基于特定设计、变速器和特定传动模式来预先计算。
[0183]
起始转速“ω0””
获取值和最终转速“ω
f”获取值例如通过读取转速传感器的输出来登记和获取,该转速传感器布置成用于在所述特定时间点,即,在同步周期的开始和结束时检测齿轮的转速。
[0184]
此后,基于最终转速“ω
f_bmid”的计算值与最终转速“ω
f”获取值之间的差,计算新的误差值“ω
f_error”。例如,新的误差值“ω
f_err
or”可以等于最终转速“ω
f”获取值减去最终转速“ω
f_bmid”的计算值的绝对值。
[0185]
此后,调整值“b”的范围的上限,端值之一b
high
,以用于使“b”的范围缩小“b”的先前范围的一半。具体而言,如果在减档期间,最终转速的计算值“ω
f_bmid”大于最终转速获取值“ω
f”,或者如果在加档期间最终转速的计算值“ω
f_bmid”小于最终转速获取值“ω
f”,则可以将下端值blow设为b
mid
。
[0186]
而且,如果在加档期间,最终转速的计算值“ω
f_bmid”大于最终转速获取值“ω
f”,或者如果在减档期间,最终转速的计算值“ω
f_bmid”小于最终转速获取值“ω
f”,则可以将上端值b
high
设为b
mid
。
[0187]
此后,计算b
mid
的新值,作为由“b”的范围的端值b
high
和b
low
的更新后的值所定义的范围的中心,并且变量“iteration#”加一。
[0188]
在此之后,该算法返回到第一评估步骤82,从而形成涉及上述步骤82、84和85的迭代算法,直到计算出的误差值“ω
f_error”小于最大允许误差“ω
f_error bound”,在此阶段,步骤83中的算法呈现结果“b”=“b
mid”,并终止该算法,如上所述。
[0189]
图9示意性地示出了搜索算法的操作行为,其中,示出了初始端值b_min、b_max,以及对应的转速的最大值和最小值“ω
f_max”和“ω
f_min”。图9还示出了最终转速的获取值“ω
f”,以及与所述最终转速“ω
f”对应的拖滞力矩系数“b”的值。
[0190]
在迭代1中,将值b
mid
设置在b_min和b_low的中心。然后,基于“b
mid”的齿轮的最终转速“ω
f_bmid”的计算得到“ω
f”《“ω
f_bmid”。因此,b_low被设为b
mid
,从而将“b”的范围减半。然后该算法进行迭代,并且结果如图9所示,其中,可以看到该算法如何逐渐缩窄“b”的范围,直到误差值“ω
f_error”小于最大允许误差“ω
f_error bound”,在此阶段,该算法呈现结果“b”=“b
mid”,并终止该算法。
[0191]
本公开内容因此提供一种用于确定变速器的拖滞力矩系数的方法。参照图10,根据一个示例性实施例的方法包括第一步骤s10,执行转速同步,该转速同步涉及将同步力矩“t”施加于第一传动构件32、34。在图2a的示例变速器中,第一传动构件将对应于第二齿轮32或第四齿轮34。
[0192]
该方法还包括第二步骤s20,获取第一传动构件在转速同步之前的初始转速ω0和第一传动构件在转速同步之后的最终转速ωf,以及用于执行转速同步的时长“t
f”。
[0193]
该方法还包括第三步骤s30,获取与在转速同步期间施加于第一传动构件的同步力矩的水平相关的信息;以及第四步骤s40,获取与关联于第一传动构件的总转动惯量相关的信息。
[0194]
最后,该方法包括第五步骤s50,基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与第一传动构件关联的总转动惯量来确定拖滞力矩系数。
[0195]
显然,可以对上述方法步骤s10-s50进行各种修改。例如,第三步骤s30和第四步骤s40中的各个可以在同步周期期间,在登记第一传动构件32、34的速度变化分布的步骤之前或之后执行。
[0196]
更详细地,可以在包括转速同步的换档过程已结束之后,执行基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与第一传动构件关联的总转动惯量来确定拖滞力矩系数的第五步骤。换言之,该方法的第一步骤s10和第二步骤s20可以实时地执行,即在实际换档期间执行,但第五步骤s50可以离线执行,即在完成换档之后执行。事实上,第五步骤s50甚至可以由不同于变速器控制器20的cpu来执行,或者在低档位活动期间由变速器控制器20执行。
[0197]
此外,在一些示例性实施例中,确定拖滞力矩系数的第五步骤s50涉及利用以拖滞力矩系数b、第一传动构件32、34在转速同步之前的初始转速ω0、第一传动构件32、34在转速同步之后的最终转速ωf、用于执行转速同步的时长tf、施加的同步力矩t的水平以及与第一传动构件32、34关联的总转动惯量j作为项的方程式。
[0198]
此外,在一些示例性实施例中,确定拖滞力矩系数的第五步骤s50涉及应用搜索算法,特别是二分搜索算法来识别拖滞力矩系数。然而,可以可替代地使用其他搜索算法,例如“峰值搜索算法”、“线性搜索算法”、“跳跃搜索算法”等。
[0199]
参照图11,当第五步骤s50包括应用用于确定拖滞力矩系数的二分搜索算法时,第五步骤包括第一子步骤s51,将拖滞力矩系数的值b
mid
设定为等于初始拖滞力矩系数值。
[0200]
第五步骤还包括基于以拖滞力矩系数、第一传动构件的初始转速、第一传动构件的最终转速、用于执行转速同步的时长、所获取的同步力矩水平和所获取的转动惯量水平作为项的方程式,计算以下项之一的值的第二子步骤s52:
[0201]
第一传动构件的初始转速、
[0202]
第一传动构件的最终转速、
[0203]
用于执行转速同步的时长、
[0204]
同步力矩的水平、以及
[0205]
与第一传动构件关联的总转动惯量。
[0206]
第五步骤还包括第三子步骤s53,计算误差值,该误差值等于所述项获取值和所述项的计算值之间的差;以及第四子步骤s54,将该误差值与误差容限进行比较,并在误差值小于或等于该误差容限时终止该二分搜索算法。
[0207]
最后,第五步骤还包括第五步骤s55,将所述项的获取值与所述项的计算值进行比较,据此相应地调整拖滞力矩系数的值,并继续重复该二分搜索算法的第二步骤至第五步骤。
[0208]
换言之,该二分搜索算法实际上可以基于方程式的任一参数来应用。例如,如果使用总惯量或同步力矩以用于基于拖滞力矩系数的某一值bmid来计算参数,那么总惯量或同步力矩的所得的值将至少开始于可能偏离总惯量或同步力矩获取值,从而能够适当地缩小可用拖滞力矩系数范围b_min、b_max。
[0209]
具体而言,根据一些示例性实施例,第一传动构件32、34的最终转速ωf可用作变量以用于比较计算值和获取值,并用于推断如何基于结果来缩窄可用拖滞力矩系数范围b_min、b_max。在此种情况下,该方法包括:第一子步骤s51,将拖滞力矩系数设定为等于初始拖滞力矩系数;以及第二子步骤s52,基于也以拖滞力矩系数、所获取的第一传动构件的初始转速、所获取的用于执行转速同步的时长、所获取的同步力矩水平和所获取的转动惯量水平作为项的方程式,计算第一传动构件的最终转速。
[0210]
该方法还包括第三子步骤s53,计算误差值,该误差值等于所获取的最终转速和计算得到的最终转速之间的差;以及第四子步骤s54,将该误差值与误差容限进行比较,并在该误差值小于或等于该误差容限时终止该二分搜索算法。
[0211]
最后,该方法包括第五子步骤s55,将所获取的最终转速与计算得到的最终转速进行比较,据此相应地调整拖滞力矩系数的值,并继续重复该二分搜索算法的第二步骤至第五步骤。
[0212]
在根据本公开内容的方法的一些示例性实施例中,第一步骤s10还包括将拖滞力矩系数上限设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限设定为等于初始拖滞力矩系数下限,以及将初始拖滞力矩系数设置在由拖滞力矩系数上限和拖滞力矩系数下限限定的范围内,特别是在由拖滞力矩系数上限和拖滞力矩系数下限限定的所述范围的中间处。通过适当地选择拖滞力矩系数上限和拖滞力矩系数下限,增加了搜索算法收敛到提供在误差范围内误差值的拖滞力矩系数b
mid
值的可能性,因为拖滞力矩系数b
mid
的实际值随后将在由初始拖滞力矩系数上限、拖滞力矩系数下限所定义的初始范围内提供。
[0213]
再者,相应地调整拖滞力矩系数值的第五子步骤s55包括将所获取的最终转速与计算得到的最终转速进行比较,并且当在减档期间所获取的最终转速小于计算得到的最终转速时,或者当在加档期间所获取的最终转速大于计算得到的最终转速时,第五子步骤s55包括将该拖滞力矩系数下限设定为等于该拖滞力矩系数,并且将该拖滞力矩系数设定为等于由该拖滞力矩系数上限和该拖滞力矩系数下限限定的范围的中心,并且继续重复该二分
搜索算法的第二步骤至第五步骤。
[0214]
然而,当在减档期间所获取的最终转速大于计算得到的最终转速时,或者当在加档期间所获取的最终转速小于计算得到的最终转速时,第五子步骤s55包括将该拖滞力矩系数上限设定为等于该拖滞力矩系数,并且将该拖滞力矩系数设定为等于由该拖滞力矩系数上限和该拖滞力矩系数下限限定的范围的中心,并且继续重复该二分搜索算法的第二步骤至第五步骤。
[0215]
如上所述,取决于从由第一传动构件的初始转速、第一传动构件的最终转速、用于执行该转速同步的时长、同步力矩水平和与第一传动构件关联的总转动惯量构成的集合中选择的参数,可以使用适当的方程式来计算所选择参数的值,然后可以将该值与所述参数获取值,即在实际的同步周期期间检测、测量或登记的值,或者从变速器设计中推导的值,例如旋转惯量进行比较。
[0216]
当选择最终转速ωf以作为参数时,在二分搜索算法的第二步中的最终转速的计算可以使用以下方程式进行。
[0217]
其中
[0218][0219]
ω0=第一传动构件的初始转速
[0220]
t=同步力矩
[0221]bmid
=拖滞力矩系数
[0222]
tf=同步时长
[0223]
j=与第一传动构件关联的总转动惯量。
[0224]
同样,当选择用于执行旋转同步的时长“t
f”以作为参数时,应用二分搜索算法的第五步骤s50包括:第一子步骤s51,将拖滞力矩系数设定为等于初始拖滞力矩系数;以及第二子步骤52,基于也以拖滞力矩系数、所获取的第一传动构件的初始转速、所获取的第一传动构件的最终转速、所获取的同步力矩水平和所获取的转动惯量水平作为项的方程式,计算用于执行转速同步的时长。
[0225]
然后,该方法还包括第三步骤s53,计算误差值,该误差值等于所获取的用于执行转速同步的时长和所计算的用于执行转速同步的时长之间的差;以及第四步骤s54,将该误差值与误差容限进行比较,并且当该误差值小于或等于误差容限时终止二分搜索算法。
[0226]
最后,该方法接着包括第五步骤s55,将所获取的用于执行转速同步的时长与所计算的用于执行转速同步的时长进行比较,据此相应地调整拖滞力矩系数的值,并继续重复二分搜索算法的第二步骤至第五步骤。
[0227]
在根据本公开内容的方法的一些示例性实施例中,第一步骤s10还包括将拖滞力矩系数上限设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限设定为等于初始拖滞力矩系数下限,以及将初始拖滞力矩系数设置在由拖滞力矩系数上限和拖滞力矩系数下限限定的范围内,特别是在由拖滞力矩系数上限和拖滞力矩系数下限限定的所述范围的中间处。
[0228]
再者,相应地调整拖滞力矩系数值的第五子步骤s55包括将所获取的用于执行转速同步的时长与所计算的用于执行转速同步的时长进行比较,并且当在减档期间所获取的
用于执行所述转速同步的时长小于所计算的用于执行转速同步的时长时,或者当在加档期间获取的用于执行转速同步的时长大于所计算的用于执行转速同步的时长时,第五子步骤s55包括将拖滞力矩系数下限设定为等于拖滞力矩系数,并且将拖滞力矩系数设定为等于由该拖滞力矩系数上限和该拖滞力矩系数下限限定的范围的中心,并且继续重复该二分搜索算法的第二步骤至第五步骤。
[0229]
然而,当在减档期间所获取的用于执行转速同步的时长大于所计算的用于执行所述转速同步的时长时,或者当在加档期间所获取的用于执行转速同步的时长小于所计算的用于执行转速同步的时长时,第五子步骤s55包括将该拖滞力矩系数上限设定为等于该拖滞力矩系数,并且将该拖滞力矩系数设定为等于由该拖滞力矩系数上限和该拖滞力矩系数下限限定的范围的中心,并且继续重复该二分搜索算法的第二步骤至第五步骤。
[0230]
如上所述,可结合用于计算所选参数的值的适当方程式来选择各种参数,该所选参数的值随后可与该参数获取值进行比较,该所获取的值即在实际同步周期期间检测、测量或登记的值,或从变速器设计中推导的值,例如转动惯量。
[0231]
当选择用于旋转同步的时间周期“t
f”以作为参数时,在二分搜索算法的第二步中的时长计算可以使用以下方程式执行。
[0232]
其中
[0233][0234]
ω0=第一传动构件的初始转速
[0235]
t=同步力矩
[0236]bmid
=拖滞力矩系数
[0237]
ωf=第一传动构件的最终转速
[0238]
j=与第一传动构件关联的总转动惯量。
[0239]
此外,根据上述方程式(11),该方法可包括将初始拖滞力矩系数上限设定为等于同步力矩除以所获取的最终转速,并将初始拖滞力矩系数下限设定为等于零。由此,拖滞力矩系数的整个可能的范围被包括在搜索算法的搜索范围内。
[0240]
参照图12,本公开内容还涉及一种用于控制变速器的转速同步的方法,其中,该方法包括:第一步骤s80,在根据上面定义的方法的第一转速同步期间确定变速器的拖滞力矩系数;第二步骤s81,基于所确定的拖滞力矩系数来校准变速器控制软件;以及第三步骤s82,借助于经校准的变速器控制软件来控制变速器随后的第二转速同步。
[0241]
该方法描述了利用本方法和系统以识别拖滞力矩系数的基本功能和操作,即,首先在实际的换档操作期间登记并获取相关操作参数以用于随后识别拖滞力矩系数,然后识别所述拖滞力矩系数,并基于所确定的拖滞力矩系数来校准变速器控制软件。
[0242]
因此,该方法使得能够从过去在某些条件下从换档中收集的数据中识别摩擦力矩系数,并且当在相同条件下再次计划相同的换档时,最准确的摩擦力矩系数值将能够用于变速器控制单元20,因此使得能够进行更准确的控制,从而导致更快、更平稳且更安静的换档。
[0243]
由于各变速器具有各自且独特的拖滞力矩特性,所以将该独特的拖滞力矩系数考虑在内进行各变速器的校准是实现快速、平稳且静音的换档的重要步骤。
[0244]
基于拖滞力矩系数的频繁更新数据的校准步骤还使得变速器控制器能够持续地适应变速器油特性的经时退化,以及诸如轴承、齿轮和密封件等传动构件的磨损。因此,拖滞力矩系数的监测还可用于根据所监测的拖滞力矩系数的当前状态和历史来计划变速器维护和/或修理事件。
[0245]
本公开内容还涉及一种电子控制单元,该电子控制单元包括构造成执行如上所述的方法的处理器。电子控制单元例如可以是变速器控制器20。
[0246]
根据本公开内容的方法通常以包括指令的计算机程序的形式实现,当该程序由计算机执行时,该指令使得计算机执行如上所述的方法。这些指令例如可以储存在计算机可读储存介质上,该储存介质可以由计算机读取并由其随后执行,使得计算机可以执行如上所述的方法。或者,根据另一示例性实施例,云计算系统可以构造成执行本文所呈现的任何方法方面。该云计算系统可以包括分布式云计算资源,分布式云计算资源在一个或多个计算机程序产品的控制下共同执行在此呈现的方法方面。
[0247]
参照图2a,本公开内容还涉及一种变速器系统,其包括电子控制单元20和包括第一可旋转传动构件32、34的变速器6,其中,电子控制单元20被配置成用于在执行包括对第一传动构件32、34施加同步力矩的转速同步时:获取第一传动构件32、24在转速同步之前的的初始转速ω0、第一传动构件32、34在转速同步之后的最终转速ωf,以及用于执行转速同步的时长t;获取与在该转速同步期间施加于该第一传动构件32、34的同步力矩的水平相关的信息;获取与关联于该第一传动构件32、34的总转动惯量相关的信息;以及基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩的水平以及与第一传动构件32、34关联的总转动惯量来确定拖滞力矩系数。
[0248]
例如如图2a所例示的,变速器6可以是包括多个驱动齿轮9,10的步进齿轮变速器。
[0249]
而且,例如如图2a和图2c所例示的,本公开内容还涉及一种用于混合动力电动或电动交通工具的传动系4,其中,该传动系4包括如上所述的变速器系统,以及与该变速器6驱动地连接的电动推进马达2b。
[0250]
此外,参考图1,本公开内容还涉及交通工具1,例如汽车,其包括如上所述的数据处理控制单元20、或变速器系统或传动系4。
[0251]
上面已经参考特定实施例呈现了本公开内容。然而,除了上述实施例之外的其他实施例也是可能的,并且在本公开内容的范围内。可以在本公开内容的范围内提供与上述步骤不同的通过硬件或软件执行该方法的方法步骤。
[0252]
电子控制单元20包括一个或多个处理器,该处理器可以是用于进行数据或信号处理或用于执行储存在存储器中的计算机代码的任何数量的硬件构件或包括其。该控制单元20可以具有关联的存储器,并且存储器可以是用于储存数据和/或计算机代码以用于完成或促进本说明书中描述的各种方法的一个或多个装置。存储器可以包括易失性存储器或非易失性存储器。存储器可以包括数据库组件、目标代码组件、脚本组件或用于支持本说明书的各种活动的任何其他类型的信息结构。根据示例性实施例,任何分布式或本地存储器装置都可与本描述的系统和方法一起使用。根据示例性实施例,存储器可通信地连接于处理器(例如,经由电路或任何其他有线、无线或网络连接),并且包括用于执行本文中描述的一
个或多个过程的计算机代码。
[0253]
要理解的是,以上描述本质上仅是示例性的,并且不意图限制本公开内容、其应用或使用。尽管已经在说明书中描述且在附图中示出了特定示例,但是本领域技术人员将理解,可进行各种更改,并且可用等同物替换它们的要素,而不脱离在权利要求中限定的本公开内容的范围。此外,可进行修改以使具体的情形或材料适应本公开内容的教导,而不脱离其基本范围。
[0254]
因此,并不旨在将本公开内容限于作为当前用于实施本公开内容教导而构思出的最佳模式而公开的具体示例,这些具体示例通过附图描绘并在说明书中加以描述。相反地,本公开内容的范围将包括落入前述说明和所附权利要求范围内的任何实施方式。权利要求中提到的附图标记不应被视为限制受权利要求保护的主题的范围,它们的唯一作用是使权利要求更容易理解。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。