技术特征:
1.一种用于确定变速器的拖滞力矩系数(b)的方法,所述方法包括:执行转速同步,所述转速同步包括将同步力矩(t)施加于第一传动构件(32、34);获取所述第一传动构件(32、34)在所述转速同步之前的初始转速、以及所述第一传动构件(32、34)在所述转速同步之后的最终转速、以及用于执行所述转速同步的时长;获取与在所述转速同步期间施加于所述第一传动构件(32、34)上的所述同步力矩(t)的水平相关的信息,获取与关联于所述第一传动构件(32、34)的总转动惯量(j)相关的信息;基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩(t)的水平以及与所述第一传动构件(32、34)关联的总转动惯量(j),确定所述拖滞力矩系数(b)。2.根据权利要求1所述的方法,其中,确定所述拖滞力矩的步骤包括:利用以所述拖滞力矩系数(b)、所述第一传动构件(32、34)在所述转速同步之前的初始转速、所述第一传动构件(32、34)在所述转速同步之后的最终转速、用于执行所述转速同步的时长、施加的同步力矩(t)的水平以及与所述第一传动构件(32、34)关联的总转动惯量(j)作为项的方程式。3.根据权利要求1或2所述的方法,其中,确定所述拖滞力矩系数(b)的步骤涉及应用搜索算法,特别是二分搜索算法,以用于识别所述拖滞力矩系数(b)。4.根据权利要求3所述的方法,其中,应用所述二分搜索算法包括:第一步骤:将所述拖滞力矩系数(b)的值设定成等于初始拖滞力矩系数值;第二步骤:基于以所述拖滞力矩系数(b)、所述第一传动构件(32、34)的初始转速、所述第一传动构件(32、34)的最终转速、用于执行所述转速同步的时长、所获取的同步力矩(t)的水平和所获取的转动惯量(j)的水平作为项的方程式,计算以下项之一的值:-所述第一传动构件(32、34)的初始转速;-所述第一传动构件(32、34)的最终转速;-用于执行所述转速同步的时长;-同步力矩(t)的水平;以及-与所述第一传动构件(32、34)关联的总转动惯量(j);第三步骤:计算误差值,所述误差值等于所述项的获取值与所述项的计算值之间的差;第四步骤:将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差容限时终止所述二分搜索算法;第五步骤:将所述项的获取值与所述项的计算值进行比较,据此相应地调整所述拖滞力矩系数(b)的值,并继续重复所述二分搜索算法的第二步骤至第五步骤。5.根据权利要求3所述的方法,其中,应用所述二分搜索算法包括:第一步骤:将所述拖滞力矩系数(b)设定成等于初始拖滞力矩系数;第二步骤:基于也以所述拖滞力矩系数(b)、所获取的所述第一传动构件(32、34)的初始转速、所获取的用于执行所述转速同步的时长、所获取的同步力矩(t)的水平和所获取的转动惯量(j)的水平作为项的方程式,计算所述第一传动构件(32、34)的最终转速;第三步骤:计算误差值,所述误差值等于所获取的最终转速和计算得到的最终转速之间的差;第四步骤:将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差
容限时终止所述二分搜索算法;第五步骤:将所获取的最终转速与计算得到的最终转速进行比较,据此相应地调整所述拖滞力矩系数(b)的值,并继续重复所述二分搜索算法的第二步骤至第五步骤。6.根据权利要求5所述的方法,其中,所述第一步骤还包括:将拖滞力矩系数上限(b
high
)设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限(b
low
)设定为等于初始拖滞力矩系数下限,以及将所述初始拖滞力矩系数(b
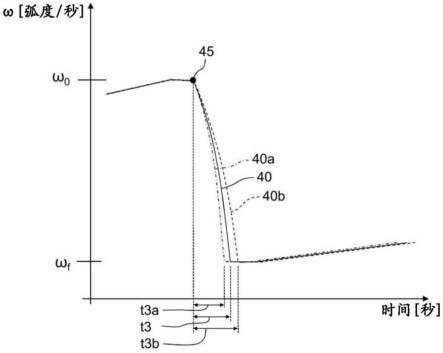
mid
)设定在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围内,特别是设定在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的所述范围的中心处;并且其中,所述第五步骤包括将所获取的最终转速与计算得到的最终转速进行比较;以及-当在减档期间所获取的最终转速小于计算得到的最终转速时,或者当在加档期间所获取的最终转速大于计算得到的最终转速时,将所述拖滞力矩系数下限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤:-当在减档期间所获取的最终转速大于计算得到的最终转速时,或者当在加档期间所获取的最终转速小于计算得到的最终转速时,将所述拖滞力矩系数上限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤。7.根据前述权利要求2或4-6中的任一项所述的方法,其中,在所述二分搜索算法的第二步骤中所述最终转速的计算是使用如下方程式进行的:其中ω0=第一传动构件(32、34)的初始转速;t=同步力矩;b
mid
=拖滞力矩系数;t
f
=同步时长;/=与第一传动构件(32、34)关联的总转动惯量。8.根据权利要求3所述的方法,其中,应用所述二分搜索算法包括:第一步骤:将所述拖滞力矩系数(b)设定为等于初始拖滞力矩系数;第二步骤:基于也以所述拖滞力矩系数(b)、所获取的所述第一传动构件(32、34)的初始转速、所获取的所述第一传动构件(32、34)的最终转速、所获取的所述同步力矩(t)的水平和所获取的转动惯量(j)的水平作为项的方程式,计算用于执行所述转速同步的时长;第三步骤:计算误差值,所述误差值等于所获取的用于执行所述转速同步的时长与计算出的用于执行所述转速同步的时长之间的差;第四步骤:将所述误差值与误差容限进行比较,并在所述误差值小于或等于所述误差容限时终止所述二分搜索算法;第五步骤:将所获取的用于执行所述转速同步的时长与计算出的用于执行所述转速同
步的时长进行比较,据此相应地调整所述拖滞力矩系数(b)的值,并继续重复所述二分搜索算法的第二步骤至第五步骤。9.根据权利要求8所述的方法,其中,所述第一步骤还包括将拖滞力矩系数上限设定为等于初始拖滞力矩系数上限,将拖滞力矩系数下限设定为等于初始拖滞力矩系数下限,以及将所述初始拖滞力矩系数设定在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围内,特别是设定在由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的所述范围的中心处;并且其中,所述第五步骤包括将所获取的用于执行所述转速同步的时长与计算出的用于执行所述转速同步的时长进行比较;以及-当在减档期间所获取的用于执行所述转速同步的时长小于计算出的用于执行所述转速同步的时长时,或者当在加档期间所获取的用于执行所述转速同步的时长大于计算出的用于执行所述转速同步的时长时,将所述拖滞力矩系数下限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤;-当在减档期间所获取的用于执行所述转速同步的时长大于计算出的用于执行所述转速同步的时长时,或者当在加档期间所获取的用于执行所述转速同步的时长小于计算出的用于执行所述转速同步的时长时,将所述拖滞力矩系数上限设定为等于所述拖滞力矩系数,并且将所述拖滞力矩系数设定为等于由所述拖滞力矩系数上限和所述拖滞力矩系数下限限定的范围的中心,并且继续重复所述二分搜索算法的第二步骤至第五步骤。10.根据前述权利要求8或9所述的方法,其中,所述二分搜索算法的第二步骤中所述最终转速的计算是使用以下方程式执行的:其中ω0=第一传动构件(32、34)的初始转速;t=同步力矩;b
mid
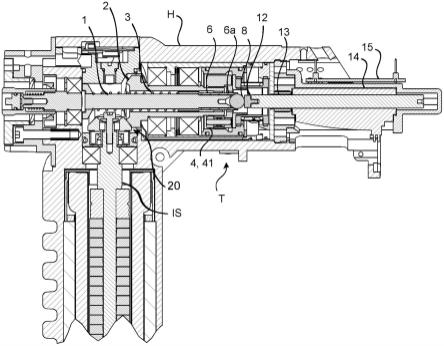
=拖滞力矩系数;ω
f
=第一传动构件(32、34)的最终转速;/=与第一传动构件(32、34)关联的总转动惯量。11.根据权利要求6-9中的任一项所述的方法,包括将所述初始拖滞力矩系数上限设定为等于同步力矩(t)除以所获取的最终转速,并将所述初始拖滞力矩系数下限设定为等于零。12.一种用于控制变速器的转速同步的方法,所述方法包括:根据由前述权利要求中的任一项中限定的方法,在第一转速同步期间确定所述变速器的拖滞力矩系数(b);基于所确定的拖滞力矩系数(b)校准变速器控制软件;以及利用经校准的变速器控制软件控制所述变速器的后续的第二转速同步。13.根据前述权利要求中任一项所述的方法,其中,所述拖滞力矩系数(b)可从方程式
中导出,其中j=物体的总转动惯量,ω=物体的转速,并且t=施加于该物体的转动力矩。14.根据前述权利要求中的任一项的方法,其中,所述拖滞力矩系数(b)可由以下方程式确定:其中:b=拖滞力矩系数;ω0=第一传动构件(32、34)在转速同步之前的初始转速;ω
f
=第一传动构件(32、34)在转速同步之后的最终转速;t
f
=用于执行转速同步的时长;t=施加的同步力矩的水平;以及j=与第一传动构件(32、34)关联的总转动惯量。15.一种变速器系统,其包括电子控制单元(20)和包括第一可旋转传动构件(32、34)的变速器(6),其中,所述电子控制单元(20)被配置成用于在执行包括对所述第一传动构件(32、34)施加同步力矩(t)的转速同步时:获取所述第一传动构件(32、34)在所述转速同步之前的初始转速、以及所述第一传动构件(32、34)在所述转速同步之后的最终转速、以及用于执行所述转速同步的时长(t
f
);获取与在所述转速同步期间施加于所述第一传动构件(32、34)的所述同步力矩(t)的水平相关的信息;获取与关联于所述第一传动构件(32、34)的总转动惯量(j)相关的信息;基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩(t)的水平以及与所述第一传动构件(32、34)关联的总转动惯量(j),确定所述拖滞力矩系数(b)。16.一种用于混合动力电动交通工具或电动交通工具的动力传动系,所述动力传动系(4)包括根据权利要求15所述的变速器系统以及与所述变速器(6)驱动地连接的推进电机(2b)。17.一种交通工具(1),包括根据权利要求15所述的变速器系统或根据权利要求16所述的动力传动系(4)。
技术总结
一种用于确定变速器的拖滞力矩系数(b)的方法。该方法包括:执行转速同步,所述转速同步包括将同步力矩(T)施加于第一传动构件(32、34);以及,获取所述转速同步之前的所述第一传动构件(32、34)的初始转速、以及在所述转速同步之后的所述第一传动构件(32、34)的最终转速,以及用于执行所述转速同步的时长。该方法还包括:获取与在转速同步期间施加于第一传动构件(32、34)的同步力矩(T)的水平相关的信息;以及,获取与关联于第一传动构件(32、34)的总转动惯量(J)相关的信息。此外,该方法包括基于所获取的初始转速、所获取的最终转速、所获取的时长、所施加的同步力矩(T)的水平以及与所述第一传动构件(32、34)关联的总转动惯量(J)确定所述拖滞力矩系数(b)。此外,本公开内容还涉及相应的变速器系统。涉及相应的变速器系统。涉及相应的变速器系统。
技术研发人员:M
受保护的技术使用者:宁波吉利汽车研究开发有限公司
技术研发日:2020.09.30
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。