1.本发明涉及机电控制领域,尤其涉及一种自适应气缸运行驱动系统及方法。
2.
背景技术:
3.智能化是21世纪机电一体化技术发展的一个重要发展方向。人工智能在机电一体化建设者的研究日益得到重视,机器人与数控机床的智能化就是重要应用。这里所说的“智能化”是对机器行为的描述,是在控制理论的基础上,吸收人工智能、运筹学、计算机科学、模糊数学、心理学、生理学和混沌动力学等新思想、新方法,模拟人类智能,使它具有判断推理、逻辑思维、自主决策等能力,以求得到更高的控制目标。诚然,使机电一体化产品具有与人完全相同的智能,是不可能的,也是不必要的。但是,高性能、高速的微处理器使机电一体化产品赋有低级智能或人的部分智能,则是完全可能而又必要的。
4.当前,在使用气缸作为各种应用场景的驱动部件时,在气缸运行过程中如果油体从气缸的缸体内翻出时,说明气缸运行发生故障,需要进行气缸降速乃至停机操作,并进行油污清理,以避免气缸故障扩大化,同时保证干净安全的气缸运行环境。
技术实现要素:
5.为了解决相关领域的技术问题,本发明提供了一种自适应气缸运行驱动系统及方法,能够在改造现有气缸内部结构的同时,引入智能化检测机制对气缸底部木板的油污分布面积进行现场检测,并在油污分布面积过度时触发相应提醒动作,从而有效维护了气缸的运行环境。
6.相比较于现有技术,本发明至少需要具备以下两处突出的实质性特点:
7.(1)采用针对性的可视化识别机制对定制缸体结构底部所在木板的油污分布状况进行实时判断,以在油污分布过度时执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作,以避免出现因为气缸故障产生的油污蔓延场景;
8.(2)采用包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套的定制缸体结构,用于实现气缸的高精度驱动控制。
9.根据本发明的一方面,提供了一种自适应气缸运行驱动系统,所述系统包括:
10.定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;
11.运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的
蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;
12.现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;
13.第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;
14.第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;
15.第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;
16.油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;
17.数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大于等于预设面积阈值时,发出油污过度信号;
18.降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;
19.其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。
20.根据本发明的另一方面,还提供了一种自适应气缸运行驱动方法,所述方法包括:
21.使用定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;
22.使用运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;
23.使用现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;
24.使用第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;
25.使用第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;
26.使用第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;
27.使用油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;
28.使用数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大于等于预设面积阈值时,发出油污过度信号;
29.使用降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;
30.其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。
附图说明
31.以下将结合附图对本发明的实施方案进行描述,其中:
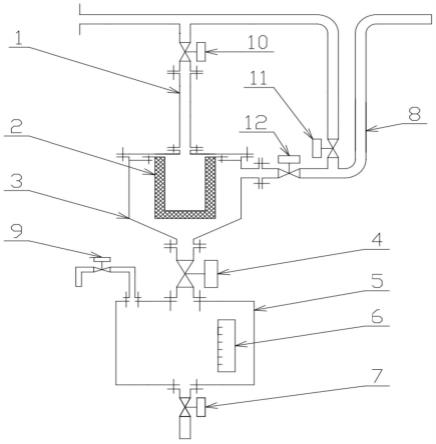
32.图1为根据本发明实施方案示出的自适应气缸运行驱动系统及方法所使用的定制缸体结构的内部结构示意图。
具体实施方式
33.下面将参照附图对本发明的自适应气缸运行驱动方法的实施方案进行详细说明。
34.自适应控制的研究对象是具有一定程度不确定性的系统,这里所谓的“不确定性”是指描述被控对象及其环境的数学模型不是完全确定的,其中包含一些未知因素和随机因素。任何一个实际系统都具有不同程度的不确定性,这些不确定性有时突出在系统内部,有时突出在系统的外部。从系统内部来讲,描述被控对象的数学模型的结构和参数,设计者事先并不一定能准确知道。作为外部环境对系统的影响,可以等效地用许多扰动来表示。这些扰动通常是不可预测的。此外,还有一些测量时产生的不确定因素进入系统。面对这些客观存在的各式各样的不确定性,如何设计适当的控制作用,使得某一指定的性能指标达到并保持最优或者近似最优,这就是自适应控制所要研究解决的问题。
35.当前,在使用气缸作为各种应用场景的驱动部件时,在气缸运行过程中如果油体从气缸的缸体内翻出时,说明气缸运行发生故障,需要进行气缸降速乃至停机操作,并进行油污清理,以避免气缸故障扩大化,同时保证干净安全的气缸运行环境。
36.为了克服上述不足,本发明搭建了一种自适应气缸运行驱动系统及方法,能够有
效解决相应的技术问题。
37.图1为根据本发明实施方案示出的自适应气缸运行驱动系统及方法所使用的定制缸体结构的内部结构示意图。
38.根据本发明实施方案示出的自适应气缸运行驱动系统包括:
39.定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;
40.运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;
41.现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;
42.第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;
43.第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;
44.第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;
45.油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;
46.数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大于等于预设面积阈值时,发出油污过度信号;
47.降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;
48.其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。
49.接着,继续对本发明的自适应气缸运行驱动系统的具体结构进行进一步的说明。
50.在所述自适应气缸运行驱动系统中:
51.基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板
的设定成像高度解析油污实体面积包括:在所述现场采集机构距离所述木板的设定成像高度保持不变时,所述油污成像区域占据的像素点数量越大,解析获得的油污实体面积越大。
52.在所述自适应气缸运行驱动系统中:
53.所述数据判断部件还用于在接收到的油污实体面积小于所述预设面积阈值时,发出油污轻度信号;
54.其中,所述降速提醒部件还用于在接收到所述油污轻度信号时,停止执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作。
55.在所述自适应气缸运行驱动系统中:
56.所述运动传感器还用于在检测到所述活塞当前运动速率未超限时,发出第二检测指令。
57.在所述自适应气缸运行驱动系统中:
58.所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令包括:所述运动传感器用于在检测到所述活塞当前运动速率大于设定速率阈值时,发出第一检测指令。
59.根据本发明实施方案示出的自适应气缸运行驱动方法包括:
60.使用定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;
61.使用运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;
62.使用现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;
63.使用第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;
64.使用第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;
65.使用第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;
66.使用油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;
67.使用数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大
于等于预设面积阈值时,发出油污过度信号;
68.使用降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;
69.其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。
70.接着,继续对本发明的自适应气缸运行驱动方法的具体步骤进行进一步的说明。
71.在所述自适应气缸运行驱动方法中:
72.基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述现场采集机构距离所述木板的设定成像高度保持不变时,所述油污成像区域占据的像素点数量越大,解析获得的油污实体面积越大。
73.在所述自适应气缸运行驱动方法中:
74.所述数据判断部件还用于在接收到的油污实体面积小于所述预设面积阈值时,发出油污轻度信号;
75.其中,所述降速提醒部件还用于在接收到所述油污轻度信号时,停止执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作。
76.在所述自适应气缸运行驱动方法中:
77.所述运动传感器还用于在检测到所述活塞当前运动速率未超限时,发出第二检测指令。
78.在所述自适应气缸运行驱动方法中:
79.所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令包括:所述运动传感器用于在检测到所述活塞当前运动速率大于设定速率阈值时,发出第一检测指令。
80.另外,在所述自适应气缸运行驱动系统及方法中,所述运动传感器还用于在检查到所述活塞当前运动速率未超限时,发出第二检测指令包括:所述运动传感器还用于在检测到所述活塞当前运动速率小于等于设定速率阈值时,发出第二检测指令;
81.以及在所述自适应气缸运行驱动系统及方法中,所述蓝牙收发接口还用于在接收到所述第二检测指令时,发出所述第二检测指令。
82.采用本发明的自适应气缸运行驱动系统及方法,针对现有技术中气缸内部结构不够紧凑且运行油污现象严重的技术问题,能够在改造现有气缸内部结构的同时,引入智能化检测机制对气缸底部木板的油污分布面积进行现场检测,并在油污分布面积过度时触发相应提醒动作。
83.尽管本发明已经按照目前的优选实施例进行了描述,还应该理解透露的内容不能仅仅被上述有限的描述解释。经过对上述描述的阅读,各种对本发明的替换和修改对于这些本领域的普通技术人员来说无疑的是显而易见的。因此,意味着附加权利要求被解释为覆盖了所有的全部在本发明的“实质”的精神和范围中的替换和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。