技术特征:
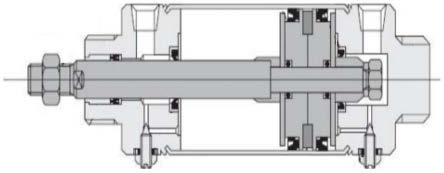
1.一种自适应气缸运行驱动系统,其特征在于,所述系统包括:定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大于等于预设面积阈值时,发出油污过度信号;降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。2.如权利要求1所述的自适应气缸运行驱动系统,其特征在于:基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述现场采集机构距离所述木板的设定成像高度保持不变时,所述油污成像区域占据的像素点数量越大,解析获得的油污实体面积越大。3.如权利要求1所述的自适应气缸运行驱动系统,其特征在于:所述数据判断部件还用于在接收到的油污实体面积小于所述预设面积阈值时,发出油污轻度信号;
其中,所述降速提醒部件还用于在接收到所述油污轻度信号时,停止执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作。4.如权利要求1所述的自适应气缸运行驱动系统,其特征在于:所述运动传感器还用于在检测到所述活塞当前运动速率未超限时,发出第二检测指令。5.如权利要求1所述的自适应气缸运行驱动系统,其特征在于:所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令包括:所述运动传感器用于在检测到所述活塞当前运动速率大于设定速率阈值时,发出第一检测指令。6.一种自适应气缸运行驱动方法,其特征在于,所述方法包括:使用定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套,所述活塞杆从所述缸筒内探出且通过所述活塞杆盖与所述缸筒的一端开口四周密接,所述尾部罩壳设置在所述缸筒的另一端,所述缓冲密封垫片设置在所述缓冲针阀的周围,所述活塞设置在所述活塞杆和所述缓冲密封垫之间,所述缓冲密封垫设置在所述活塞和所述尾部罩壳之间,所述活塞密封夹持在所述缸筒的筒壁和所述活塞之间的空隙内;使用运动传感机构,包括内置于所述活塞内部的运动传感器以及设置在所述活塞上的蓝牙收发接口,所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令,所述蓝牙收发接口与所述运动传感器连接,用于在接收到所述第一检测指令时,发出所述第一检测指令;使用现场采集机构,与所述运动传感机构的蓝牙收发接口连接,用于在接收到所述第一检测指令时,执行对所述定制缸体结构底部所在木板的定向图像采集,以获得相应的现场采集画面;使用第一辨识机构,与所述现场采集机构连接,用于对接收到的现场采集画面执行基于所述现场采集机构的采集镜头的光学元件的光学特性的透镜阴影效应消除动作,以获得第一辨识图像;使用第二辨识机构,与所述第一辨识机构连接,用于对接收到的第一辨识图像执行图像svd增强动作,以获得第二辨识图像;使用第三辨识机构,与所述第二辨识机构连接,用于对接收到的第二辨识图像执行谐波均值滤波动作,以获得第三辨识图像;使用油污提取部件,与所述第三辨识机构连接,用于基于油污亮度数值范围识别所述第三辨识图像中的油污成像区域,并基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积;使用数据判断部件,与所述油污提取部件连接,用于在接收到的油污实体面积大于等于预设面积阈值时,发出油污过度信号;使用降速提醒部件,与所述数据判断部件连接且设置在所述缸筒的外壁上,与所述数据判断部件连接,用于在接收到所述油污过度信号时,执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作;其中,基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板
的设定成像高度解析油污实体面积包括:在所述油污成像区域占据的像素点数量保持不变时,所述现场采集机构距离所述木板的设定成像高度越高,解析获得的油污实体面积越大。7.如权利要求6所述的自适应气缸运行驱动方法,其特征在于:基于所述油污成像区域占据的像素点数量以及所述现场采集机构距离所述木板的设定成像高度解析油污实体面积包括:在所述现场采集机构距离所述木板的设定成像高度保持不变时,所述油污成像区域占据的像素点数量越大,解析获得的油污实体面积越大。8.如权利要求6所述的自适应气缸运行驱动方法,其特征在于:所述数据判断部件还用于在接收到的油污实体面积小于所述预设面积阈值时,发出油污轻度信号;其中,所述降速提醒部件还用于在接收到所述油污轻度信号时,停止执行用于促使所述定制缸体结构的活塞降速的提醒信息的显示动作。9.如权利要求6所述的自适应气缸运行驱动方法,其特征在于:所述运动传感器还用于在检测到所述活塞当前运动速率未超限时,发出第二检测指令。10.如权利要求6所述的自适应气缸运行驱动方法,其特征在于:所述运动传感器用于在检测到所述活塞当前运动速率超限时,发出第一检测指令包括:所述运动传感器用于在检测到所述活塞当前运动速率大于设定速率阈值时,发出第一检测指令。
技术总结
本发明涉及一种自适应气缸运行驱动系统,包括:定制缸体结构,包括活塞杆、活塞杆盖、缸筒、活塞、缓冲密封垫、尾部罩壳、缓冲针阀、缓冲密封垫片、活塞密封件和含油滑动轴套;油污提取部件,用于基于油污亮度数值范围识别第三辨识图像中的油污成像区域,并基于油污成像区域占据的像素点数量以及现场采集机构距离木板的设定成像高度解析油污实体面积;数据判断部件,用于在油污实体面积大于等于预设面积阈值时,发出油污过度信号。本发明还涉及一种自适应气缸运行驱动方法。通过本发明,能够在改造现有气缸内部结构的同时,引入智能化检测机制对气缸底部木板的油污分布面积进行现场检测,并在油污分布面积过度时触发相应提醒动作。并在油污分布面积过度时触发相应提醒动作。并在油污分布面积过度时触发相应提醒动作。
技术研发人员:ꢀ(51)Int.Cl.F15B19/00
受保护的技术使用者:方鹏
技术研发日:2022.01.24
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。