1.本发明涉及水下机器人技术领域,尤其涉及一种仿生鱼驱动结构。
背景技术:
2.在大自然中,鱼类或海豚等水生生物进化除了适应水下活动的结构和外形,它们普遍采用拍动尾部或者使身体产生波动的方式进行游动,采用这样的推进模式可以使游动的效率非常高,并且这种推进模式与螺旋桨驱动相比,还具有灵活和隐蔽的特点,以它们作为仿生对象的仿生机器鱼,在海洋观察、军事侦察和水下作业等领域都有着良好的应用前景,具有重大的战略意义。
3.绳牵引驱动仿生机器鱼由于可以很好的拟合仿生对象在游动时身体真实的摆动曲线,相较于传统刚性结构,具有更高的游动效率,受到了人们的广泛关注。在水下机器人领域,目前技术大多采用相对成熟的输出回转运动的电机作为驱动动力源,其他的技术中也有采用注入记忆合金、人工肌肉等智能材料的技术,但这些技术还受限于记忆合金、人工肌肉的技术的成熟度未达到实用水平的问题,因此应用率还较低。
4.以目前的绳牵引驱动仿生机器鱼来说,会采用橡胶套将整条鱼的身体进行密封包覆,鱼的身体在胶套内进行摆动,这样会致使仿生鱼不能承载较深水下的高压环境,不能保证在真实水下环境中较长时间持续作业的可靠性。
技术实现要素:
5.本发明提供一种仿生鱼驱动结构,用以解决现有技术中绳牵引驱动的仿生机器鱼会采用橡胶套将整条鱼的身体进行密封包覆,致使仿生鱼不能承载较深水下的高压环境的技术问题,实现仿生鱼在较深水下的高压环境中长时间持续作业的可靠性。
6.本发明提供一种仿生鱼驱动结构,包括:
7.摆动机构,包括至少两个头尾依次转动相连的摆动件;
8.连接件,与位于尾部的所述摆动件转动相连;
9.尾鳍,安装于所述连接件远离所述摆动机构的一端;
10.其中,所述摆动件和/或所述连接件设有用于连接牵引绳的锁紧机构。
11.根据本发明提供一种的仿生鱼驱动结构,所述摆动件包括主体部、第一摆臂和第二摆臂,所述第一摆臂和所述第二摆臂分别设置于所述主体部的头尾两侧,所述第一摆臂设有第一铰接孔,所述第二摆臂设有第二铰接孔;
12.在相邻两个所述摆动件中,其中一个所述摆动件的所述第一摆臂与另一个所述摆动件的所述第二摆臂通过铰接件相互铰接,所述铰接件适于穿设于所述第一铰接孔和所述第二铰接孔内。
13.根据本发明提供的一种仿生鱼驱动结构,所述铰接件包括铰接轴、限位端头、衬套和限位卡环,所述限位端头设置于所述铰接轴的第一端,所述限位卡环设置于所述铰接轴的第二端,所述衬套设置于所述铰接轴的第一端和第二端之间;
14.在相邻两个所述摆动件中,所述限位端头与其中一个所述摆动件的所述第一摆臂相贴,所述铰接轴适于穿设于所述第一铰接孔和所述第二铰接孔内,所述衬套适于安装于其中一个所述摆动件的所述第一摆臂与另一个所述摆动件的所述第二摆臂之间,所述限位卡环与另一个所述摆动件的所述第二摆臂相贴。
15.根据本发明提供的一种仿生鱼驱动结构,相邻两个所述摆动件之间设有弹性构件,所述弹性构件用于所述摆动件的摆动复位。
16.根据本发明提供的一种仿生鱼驱动结构,所述弹性构件包括弹性片,所述主体部还设有连接部,所述连接部设有连接槽,所述弹性片的两端分别设置于相邻两个所述摆动件的所述连接槽中,且通过紧固件与所述连接部相互固定。
17.根据本发明提供的一种仿生鱼驱动结构,沿所述仿生鱼驱动结构的头部至尾部的方向,所述连接部的宽度逐渐减小,所述弹性片的宽度逐渐减小,且所述弹性片的厚度逐渐增大。
18.根据本发明提供的一种仿生鱼驱动结构,所述弹性构件包括弹性块,所述第一摆臂或所述第二摆臂在远离所述主体部的一侧设有凸出部,所述弹性块的第一侧与其中一个所述摆动件的所述主体部相贴,且通过紧固件相互固定,所述弹性块的第二侧与另一个所述摆动件的所述凸出部相贴。
19.根据本发明提供的一种仿生鱼驱动结构,所述第一摆臂和所述第二摆臂均设置为两个,所述两个第一摆臂在所述主体部的头侧相对设置,所述两个第二摆臂在所述主体部的尾侧相对设置,所述两个第一摆臂之间的间距大于所述两个第二摆臂之间的间距;
20.在相邻两个所述摆动件铰接时,其中一个所述摆动件的所述两个第二摆臂设置于另一个所述摆动件的所述两个第一摆臂之间。
21.根据本发明提供的一种仿生鱼驱动结构,所述主体部设有至少一个第一通孔,所述至少一个第一通孔内安装有第一导向块或所述锁紧机构,所述第一导向块设有第一导向通道,用于容置和保护所述牵引绳。
22.根据本发明提供的一种仿生鱼驱动结构,所述连接件远离所述摆动件的一侧设有相对设置的第一连接耳和第二连接耳,所述尾鳍通过紧固件安装于所述第一连接耳和所述第二连接耳之间。
23.根据本发明提供的一种仿生鱼驱动结构,所述第一连接耳和所述第二连接耳之间还设有铰接耳,所述铰接耳与所述连接件的侧表面齐平,以形成连接面,所述连接面设有第三铰接孔,位于尾部的所述摆动件通过所述铰接件转动安装于所述第三铰接孔。
24.根据本发明提供的一种仿生鱼驱动结构,所述连接件设有至少一个第二通孔,所述至少一个第二通孔内安装有第二导向块或所述锁紧机构,所述第二导向块设有第二导向通道,用于容置和保护所述牵引绳。
25.根据本发明提供的一种仿生鱼驱动结构,所述摆动机构的外侧安装有轻体材料构件,所述轻体材料构件通过紧固件与所述摆动件相固定。
26.本发明实施例提供的仿生鱼驱动结构,通过各个摆动件之间的转动连接实现摆动机构的摆动,摆动机构的摆动便可作为仿生鱼的前进动力驱动仿生鱼游动,尾鳍可利用连接件在尾部的摆动件的后方形成摆动,便可通过尾鳍驱动仿生鱼游动,而在摆动件和/或连接件设置连接牵引绳的锁紧机构,从而利用牵引绳提供动力来驱动摆动机构和/或尾鳍进
可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
40.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
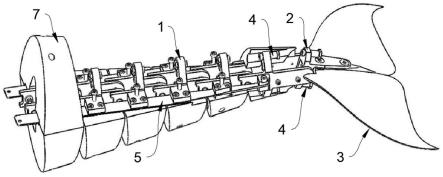
41.下面结合图1-图6描述本发明的仿生鱼驱动结构,该仿生鱼驱动结构包括摆动机构、连接件2和尾鳍3,其中摆动机构包括至少两个头尾依次转动相连的摆动件1,且至少两个摆动件1呈非闭环的方式进行连接,连接件2与位于尾部的摆动件1转动相连,尾鳍3安装于连接件2远离摆动机构的一端,同时,在摆动件1和/或连接件2设有用于连接牵引绳的锁紧机构4。
42.通过各个摆动件1之间的转动连接实现摆动机构的摆动,摆动机构的摆动便可作为仿生鱼的前进动力驱动仿生鱼游动,尾鳍3可利用连接件2在尾部的摆动件1的后方形成摆动,便可通过尾鳍3驱动仿生鱼游动,而在摆动件1和/或连接件2设置连接牵引绳的锁紧机构4,从而利用牵引绳提供动力来驱动摆动机构和/或尾鳍3进行摆动,以实现仿生鱼的游动,利用本仿生鱼驱动结构可以不需在摆动机构的外部包覆橡胶套以使鱼身全部在橡胶套内进行摆动,能克服仿生鱼在深水的高压环境中无法进行较长时间持续工作的技术问题。
43.根据需要,可以将锁紧机构4固定于摆动件1和/或连接件2上,也就是可以仅在摆动件1上设置锁紧机构4,也可以仅在连接件2上设置锁紧机构4,或是在摆动件1和连接件2上同时设置锁紧机构4。例如:仅在尾部的摆动件1安装锁紧机构4,此时牵引绳拉动后会使摆动件1形成摆动,从而驱动仿生鱼游动;或是仅在连接件2上安装锁紧机构4,此时牵引绳拉动后会使尾鳍3形成摆动,从而驱动仿生鱼游动;或是在摆动件1和连接件2上都安装锁紧机构4,此时采用两套牵引绳分别对摆动件1和连接件2进行控制,在两套牵引绳的控制下,摆动机构和尾鳍3可以同向摆动或反向摆动,当二者进行反向摆动时,便可很好的模拟真实鱼类呈“s”形游动的动作;或是可以在转动件和多个摆动件1上均安装锁紧机构4,此时牵引绳所使用的套数与锁紧机构4的个数相对应,也就是说,可以使尾鳍3以及摆动机构的各个部位形成不同方向摆动,这样的设置便可很好的模拟带鱼等鱼类的游动动作。
44.如图1所示,尾鳍3可以设置为与鱼类尾部相适配的形状。
45.根据本发明提供的仿生鱼驱动结构,如图4所示,摆动件1包括主体部101、第一摆臂102和第二摆臂103,第一摆臂102和第二摆臂103分别设置于主体部101的头尾两侧,第一摆臂102设有第一铰接孔104,第二摆臂103设有第二铰接孔105。
46.如图2所示,在相邻两个摆动件1中,其中一个摆动件1的第一摆臂102与另一个摆动件1的第二摆臂103通过铰接件相互铰接,铰接件适于穿设于第一铰接孔104和第二铰接孔105内。
47.相邻两个摆动件1利用第一摆臂102和第二摆臂103的铰接实现相邻两个摆动件1的转动连接,多个摆动件1以这样的方式连接后,多个摆动件1之间便能形成摆动,以模拟出
真实鱼类的游动动作,驱动仿生鱼进行游动。
48.其中,主体部101与第一摆臂102和第二摆臂103之间均采用一体成型的方式进行设置,以使摆动件1为一体式的结构,保证摆动件1的结构强度。其中,为适应水下作业,摆动件1采用不锈钢等防腐蚀材料制成,或是可以在摆动件1的表面设置防腐蚀层。
49.主体部101远离尾鳍3的一侧为主体部101的头侧,主体部101靠近尾鳍3的一侧为主体部101的尾侧。
50.如图2所示,前述的铰接件包括有铰接轴106、限位端头107、衬套108和限位卡环109,其中铰接轴106适于装配于第一铰接孔104和第二铰接孔105内,以实现铰接,限位端头107设置于铰接轴106的第一端,限位卡环109设置于铰接轴106的第二端,衬套108设置于铰接轴106的第一端和第二端之间。在相邻两个摆动件1进行装配时,限位端头107与其中一个摆动件1的第一摆臂102相贴,铰接轴106穿设于第一铰接孔104和第二铰接孔105内,衬套108安装于其中一个摆动件1的第一摆臂102与另一个摆动件1的第二摆臂103之间,限位卡环109与另一个摆动件1的第二摆臂103相贴。利用这样的设计一方面能保证连接的稳定性可靠性,另一方面还能利用衬套108来避免相邻两个摆动件1的第一摆臂102和第二摆臂103之间出现摩擦而出现磨损,用于提升耐磨性,且能提升摆动件1的使用寿命。
51.其中,限位端头107的外径大于第一铰接孔104的孔径;铰接轴106与第一铰接孔104和第二铰接孔105的孔径相适配,具体的,铰接轴106的直径略小于第一铰接孔104和第二铰接孔105的孔径;衬套108为圆环形结构,衬套108的内径与铰接轴106、第一铰接孔104和第二铰接孔105的直径相适配,也就衬套108的内径略大于铰接轴106的直径,衬套108的内径可以与第一铰接孔104和第二铰接孔105的孔径相同,衬套108的外径大于第一铰接孔104和第二铰接孔105的孔径;限位卡环109也为环形机构,限位卡环109的内侧与铰接轴106相固定,限位卡环109的外径大于第一铰接孔104和第二铰接孔105的孔径。以这样的方式来设置各个机构,进一步确保连接的稳定性可靠性。
52.如图1、图2、图3和图6所示,在相邻两个摆动件1之间设置有弹性构件,弹性构件用于摆动件1摆动后进行自动复位,以对整个仿生鱼驱动结构提供回正刚度,实现整体结构弯曲后的回正。弹性构件采用可拆卸的方式安装于相邻两个摆动件1之间,从而十分便于弹性构件的更换,以便于对刚度进行调整。
53.具体的,如图1-3所示,弹性构件为弹性片5,此时,在主体部101还设有连接部110,连接部110设有连接槽111,弹性片5的两端分别设置于相邻两个摆动件1的连接槽111中,且通过紧固件与连接部110相互固定。连接部110为在主体部101侧边延伸而出的一体的构件,其中连接槽111位于连接部110的中部位置,此时连接部110沿连接槽111的轴线为对称结构。沿仿生鱼游动的方向,连接槽111为通透的槽,也就是说,连接槽111在连接部110的三个方位形成槽口,一方面便于弹性片5的安装,另一方面使一个连接槽111能固定两个弹性片5的端部。
54.其中在连接部110的上表面和/或下表面设置有与连接槽111相连通的紧固通道,在弹性片5的靠近两端的位置均设置有紧固孔,在弹性片5安装到连接槽111内时,弹性片5卡设在连接槽111中,且紧固孔与紧固通道相对齐,紧固件采用紧固螺钉、紧固螺栓等机构,以使紧固件穿设进紧固孔和紧固通道内,实现弹性片5与连接部110之间位置的相互固定。
55.如图3所示,沿仿生鱼驱动结构的头部至尾部的方向,连接部110的宽度逐渐减小,
弹性片5的宽度逐渐减小,且弹性片5的厚度逐渐增大。这样的方式可以更加符合仿生对象的身体外形,使其越靠近尾部的位置外轮廓越细,以响应鱼类的仿生结构,且在弹性片5的宽度减小后使其厚度增大,从而保证刚性足够。
56.其中,弹性片5可以设置为梯形结构,呈梯形机构的弹性片5朝向摆动件1的一侧可以为直边,对应的远离弹性片5的一侧为斜边,沿仿生鱼驱动结构的头部至尾部的方向,斜边逐渐向直边靠近,逐渐收窄,以实现弹性片5宽度的逐渐减小。
57.如图6所示,在本发明的另一种实施方式中,弹性构件采用弹性块6,也即具有弹性的材料制成的块状物件,其中可以采用橡胶块或其他具有弹性高分子材料、无机材料制成。
58.可以在第一摆臂102远离主体部101的一侧设置凸出部112,将弹性块6的第一侧与其中一个摆动件1的主体部101相贴,将弹性块6的第二侧与另一个摆动件1的凸出部112相贴,从而使弹性块6能与相邻两个摆动件1进行直接或间接的接触。当然,也可以在第二摆臂103远离主体部101的一侧设置凸出部112,将弹性块6的第一侧与其中一个摆动件1的主体部101相贴,将弹性块6的第二侧与另一个摆动件1的凸出部112相贴,从而使弹性块6能与相邻两个摆动件1进行直接或间接的接触。
59.凸出部112可以用于顶推弹性块6,从而获得弹性块6的反作用力,实现整体结构的弯曲回正。
60.其中,弹性块6与主体部101通过紧固件相固定,可以在弹性块6上设置紧固孔,并且在主体部101上设置紧固通道,紧固件使用螺钉或螺栓类的紧固机构,将紧固件依次拧入到紧固孔和紧固通道内,以实现弹性块6位置的固定。
61.第一摆臂102和第二摆臂103均设置为两个,两个第一摆臂102在主体部101的头侧相对设置,两个第二摆臂103在主体部101的尾侧相对设置,两个第一摆臂102之间的间距大于两个第二摆臂103之间的间距,在相邻两个摆动件1铰接时,其中一个摆动件1的两个第二摆臂103设置于另一个摆动件1的两个第一摆臂102之间。也就是利用两个第一摆臂102将另一个摆动件1的两个第二摆臂103抱和在内,然后在分别用两个铰接件来铰接两个第一摆臂102和两个第二摆臂103,其中,两个铰接件之间具有间隙,以使牵引绳能通过。
62.在摆动件1中,两个第一摆臂102的结构相同,且两个第一摆臂102上的第一铰接孔104的位置处于同轴线,两个第二摆臂103的结构相同,且两个第二摆臂103上的第二铰接孔105的位置处于同轴线,以便于相邻两个摆动件1之间的装配。
63.如图2和图4所示,在主体部101上设有至少一个第一通孔113,至少一个第一通孔113内均安装有第一导向块114,第一导向块114内设有第一导向通道,用于容置和保护牵引绳。由于需要使用牵引绳进行牵引驱动,在摆动件1上需要设置通孔结构用于过线,在主体部101上设置至少一个第一通孔113,从而用于过线,其中第一通孔113内设置第一导向块114,一方面起到过线导向的作用,另一方面还能对牵引绳起到保护的作用,第一导向块114为采用耐磨、润滑材料制成的导向块。
64.请继续参见附图3,在主体部101的中心位置处可以设置有一方形的第一通孔113,其中设置的第一导向块114可以开设有两个第一导向通道,用于容纳来回的一组牵引绳,该组牵引绳为驱动尾鳍3摆动的牵引绳。在主体部101靠近上部和下部的位置均可以设置有圆形的第一通孔113,这些圆形的第一通孔113可以用于容纳驱动尾侧摆动件1的牵引绳,圆形的第一通孔113内安装的第一导向块114可以是内置通道的青铜螺栓。
65.其中,第一导向块114和第一通孔113之间设有紧固机构,从而起到防止第一导向块114松脱的效果。
66.在位于尾部的摆动件1的主体部101上,其第一通孔113便可用于安装锁紧机构4,从而使牵引绳能驱动位于尾部的摆动件1进行摆动。当然,也可以在其余位置的主体部101的第一通孔113内进行锁紧机构4的安装,从而实现不同效果的安装驱动。
67.如图5所示,连接件2大致可以设置为“π”字形,也就是在连接件2的其中一个设置有两个向外延伸的部分,即:连接件2远离摆动件1的一侧设有相对设置的第一连接耳201和第二连接耳202,尾鳍3通过紧固件安装于第一连接耳201和第二连接耳202之间,从而实现尾鳍3位置的固定,将尾鳍3与连接件2形成固定安装,由于连接件2与位于尾部的摆动件1是转动安装的,便可实现尾鳍3的摆动。
68.其中,第一连接耳201和第二连接耳202之间还设有铰接耳,铰接耳与连接件2的侧表面齐平,以形成连接面203,连接面203设有第三铰接孔205,位于尾部的摆动件1通过铰接件转动安装于第三铰接孔205。该铰接件与前述的铰接件的结构相同,以此方式便可实现连接件2与位于尾部的摆动件1之间的转动连接,以实现尾鳍3的摆动。
69.其中,第一连接耳201、第二连接耳202和铰接耳一体成型于连接件2上。
70.连接件2设有至少一个第二通孔204,至少一个第二通孔204内安装有第二导向块,第二导向块设有第二导向通道,用于容置和保护所述牵引绳。第二导向块一方面起到过线导向的作用,另一方面还能对牵引绳起到保护的作用,第二导向块为采用耐磨、润滑材料制成的导向块。
71.第一连接耳201和第二连接耳202均在连接件2的一侧对称设置,且未处于边缘,在连接件2的边缘至第一连接耳201以及在连接件2的边缘至第二连接耳202的位置,均设置有第二通孔204,该第二通孔204即用于安装锁紧机构4,从而使牵引绳能驱动位于尾鳍3进行摆动。
72.其中,锁紧机构4可以采用张紧螺钉,在张紧螺钉的中部设有用于容纳牵引绳的螺纹孔,通过拧动张紧螺钉,通过张紧螺钉在螺纹孔内的螺纹运动实现张紧螺钉的水平前后移动,起到张紧牵引绳的效果。
73.摆动机构的外侧安装有轻体材料构件7,轻体材料构件7通过紧固件与摆动件1相固定。轻体材料构件7可以使本仿生鱼驱动结构更好的响应仿生结构,拟合仿生对象的身体外形,每一个摆动件1对用设置有两个轻体材料构件7,当摆动机构整体为上下摆动时,两个轻体材料构件7位于摆动件1的上下两侧,当摆动机构整体为左右摆动时,两个轻体材料构件7位于摆动件1的左右两侧。
74.沿头部至尾部的方向,轻体材料构件7的外廓减小。轻体材料构件7可以补偿整体的密度,并且在摆动机构摆动的过程中随之一起摆动。
75.其中,轻体材料构件7通过紧固件安装于摆动件1上,包括但不限于螺钉类紧固机构,此时相对应的在轻体材料构件7和摆动件1上进行开孔处理。
76.本仿生鱼驱动结构具有结构紧凑,连接可靠,可承受较大相互作用力,且易于维护等优点。
77.另一方面,本发明还提供一种仿生鱼,包括前述实施例中的仿生鱼驱动结构。
78.本仿生鱼驱动结构形成的仿生鱼中具有多摆动件1串联形成的摆动机构,其身体
前三分之二的区域摆动幅度会较小,后三分之一以及尾鳍3的部分摆动较大,在游动时摆动幅度变化不大,当需要改变游动速度时,可以改变摆动的频率。
79.本仿生鱼不仅适用于小型实验模型,更适用于大中型深水高压环境下的绳牵引仿生鱼;为绳牵驱动仿生机器鱼的应用提供可靠的平台。
80.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。