1.本发明属于海洋仪器技术领域,具体说是一种系缆式水下直升机剖面测量系统及方法。
背景技术:
2.目前海洋观测主要采用船舶观测和潜标观测,船舶观测无法长期连续对海洋要素进行观测,每次观测都需要船舶费用和人工费用;潜标观测需要将测量仪器在海洋中每1层布放1套,仪器费用高昂。采用自动剖面测量系统携带1套测量仪器进行海洋剖面要素观测成本低、风险小。目前自动剖面测量系统主要是浮力驱动、电机驱动和波浪能驱动,浮力驱动只能保证自身剖面运行,无法搭载测量仪器;电机驱动耗电量大,体积大,在海中强流下容易侧翻,布放不方便;波浪能驱动对波浪要求高,在波浪小的时候无法发挥作用,且不可控。
技术实现要素:
3.本发明的目的是提供通过一种系缆式水下直升机剖面测量系统及方法,系缆式水下直升机剖面测量系统,搭载需要测量的仪器,按照需求完成定时海洋剖面观测,通过控制器控制水下直升机螺旋桨的转动速度和转动方向,可以对整个剖面测量过程进行控制。水下直升机完成剖面测量后,螺旋桨停止工作,在浮力作用下上浮停在充电上阻尼块,进行自动充电和回传剖面测量数据到岸站系统,在这个过程中可以通过岸站系统远程控制水下直升机的剖面测量频率,以克服剖面测量的弊端。
4.本发明为实现上述目的所采用的技术方案是:
5.一种系缆式水下直升机剖面测量系统,包括:岸站系统以及与其通信的水下剖面测量系统;
6.所述水下剖面测量系统,包括:水上浮球、水下直升机、运行通道缆、充电上阻尼块、下阻尼块以及锚定系统;
7.所述充电上阻尼块和下阻尼块分别固定在运行通道缆上,在充电上阻尼块和下阻尼块之间的运行通道缆部分滑动设有水下直升机;
8.所述运行通道缆一端与水上浮球连接,另一端与锚定系统连接;在所述运行通道缆上依次经充电上阻尼块、水下直升机和下阻尼块;
9.所述充电上阻尼块还通过充电线与水上浮球连接。
10.所述水上浮球包括:充电接口a、球壳以及设于球壳内的电池、耦合连接器、耦合模块以及通讯模块;
11.所述球壳为高分子聚氨酯材料壳体或pe材质壳体;
12.所述通讯模块通过通讯线与耦合模块连接,用于获得水下直升机的测量数据,并将测量数据发送回岸站系统,同时接收岸站系统的预先设定的参数,并通过通讯线发送给耦合模块;
13.所述耦合模块通过耦合线与耦合连接器连接,所述耦合连接器套设在水上浮球底部的运行通道缆外;所述耦合模块,用于与水下直升机通讯;
14.所述球壳外表面安装有充电接口a,所述球壳内的电池通过充电线与充电接口a连接;
15.所述充电接口通过充电线与充电上阻尼块连接。
16.所述充电上阻尼块内设有无线充电模块;
17.所述充电上阻尼块中心开设有位置固定孔,所述位置固定孔固设于运行通道缆上;
18.所述充电上阻尼块顶部设有充电接口b,充电接口a经充电接口b与所述无线充电模块连接;
19.所述无线充电模块设于水下直升机上方,用于将接收水上浮球内电池的电流转化为电磁,以供水下直升机充电。
20.所述水下直升机,包括:设于机壳内的控制系统、以及设于机壳上的无线充电接收模块、固定杆、连接固定器、螺旋桨、测量装置、控制系统以及水下耦合模块;
21.所述机壳侧壁水平平行设有多个连接板,所述连接板上设有限位孔,所述限位孔套设在运行通道缆上,以实现沿运行通道缆竖直运动;在任意一个所述连接板上设有水下耦合模块,所述水下耦合模块与控制系统连接;
22.所述机壳顶部设有测量装置,用于测量水下剖面的测量数据;所述测量装置与控制系统连接;
23.所述机壳顶部还设有无线充电接口,所述无线充电接收模块通过无线充电接口与控制系统连接;
24.所述机壳侧壁上还设有多个水平平行的连接固定器,所述机壳通过连接固定器与固定杆连接;
25.所述固定杆的顶端设有无线充电接收模块,固定杆的底端设有螺旋桨;所述螺旋桨通过连接固定器固设于机壳下方,且螺旋桨通过螺旋桨连接线与控制系统连接;
26.所述无线充电接收模块设于机壳上方,且与充电上阻尼块相对应。
27.所述控制系统设于机壳内,包括:控制器和充电电池;
28.所述测量装置包括水温传感器和水深传感器;
29.所述控制器分别与水温传感器、水深传感器和水下耦合模块连接;用于接收水下剖面的水温数据和水深数据,并发送至水下耦合模块;
30.所述无线充电接收模块通过无线充电接口与充电电池连接。
31.所述螺旋桨为三叶螺旋桨,桨叶长度为3cm~4cm。
32.所述无线充电接收模块中心开设有通孔,所述无线充电接收模块套设在运行通道缆上,以实现沿运行通道缆竖直运动;
33.所述无线充电接收模块水平平行设于连接板上方;
34.所述连接板的限位孔与无线充电接收模块的通孔相对应,且限位孔的孔径与通孔的孔径相等。
35.所述锚定系统,包括:张紧锤和锚定;所述张紧锤一端通过系留缆与锚定连接,另一端与运行通道缆连接。
36.一种系缆式水下直升机剖面测量系统的测量方法,包括以下步骤:
37.1)通过配重将水下直升机调节为正浮力状态;
38.2)剖面测量时,水下直升机根据预先设定的参数控制螺旋桨转动,形成向下作用力,带动水下直升机沿着运行通道缆向下运动,根据预先设定的参数和测量数据,控制螺旋桨转速和转向以满足定深悬浮、不同下降速度要求;
39.3)完成指定海底深度的数据测量时,螺旋桨停止工作,在正浮力的作用下,水下直升机沿着运行通道缆上浮至充电上阻尼块处;充电上阻尼块与无线充电接收模块相抵,水下直升机通过无线充电接收模块和无线充电模块进行电磁式无线充电,通过耦合模块和水下耦合模块将测量数据传输到通讯模块;以使通讯模块通过卫星将测量数据发送回岸站系统,完成一次循环的剖面测量。
40.所述步骤2)具体为:
41.通过控制占空比来控制螺旋桨转速和转向,为水下直升机剖面测量系统提供动力;
42.不同场景下的螺旋桨控制:
43.1)向下剖面测量:通过控制螺旋桨转向,提供向下的驱动力,控制转速为一个固定值,以一个固定的驱动力向下剖面运动,向下剖面测量过程中测量温度和深度,当到达设置的深度时,控制螺旋桨停止工作;
44.2)向上剖面测量:系统通过正浮力向上沿缆移动,移动过程中测量温度和深度,当检测到深度异常变化时,启动螺旋桨,控制转向和转速,提供系统向上的驱动力;
45.所述深度异常变化为:当海流流速超过2m/s时、水下直升机的深度在设定时间内保持不变或深度增大任意一种情况;
46.3)悬停测量:当需要测量水下某固定剖面的深度发生连续变化时,到达指定深度后,若深度持续变大,控制螺旋桨转速降低,实现向上驱动力,如果深度变小,控制螺旋桨转速增加,实现向上驱动力,保证在该固定深度悬停。
47.本发明具有以下有益效果及优点:
48.1.本发明解决了近海剖面自动测量的问题,通过水下直升机的上下剖面运动,实现剖面自动测量,螺旋桨作为动力,成本低且耐用。
49.2.本发明解决了螺旋桨驱动进行剖面测量续航短的问题,通过水下无线充电,为水下直升机续航,大大提高了自动剖面测量的续航时间。
50.3.本发明解决了自动剖面测量仪器无法应对突发情况的问题,在遇到不同的剖面测量问题时,采用螺旋桨提高转速、更改转向等措施进行应对。
51.4.本发明解决了自动剖面测量仪器无法实时回传数据的问题,水下直升机将测量数据通过耦合传送给通讯设备,通讯设备实时回传给岸站接收系统。
52.5.本发明大大降低了组建近海剖面测量网的成本,对单点剖面测量具有可控性和实时性。
附图说明
53.图1是本发明的总体结构示意图;
54.图2是本发明的水上浮球的结构示意图;
55.图3是本发明的充电上阻尼块的结构示意图;
56.图4是本发明的水下直升机的结构示意图;
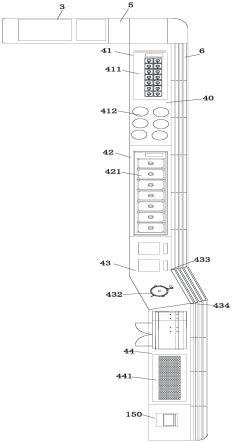
57.图5是本发明的岸站系统的结构示意图;
58.其中,1为水上浮球,2为运行通道缆,3为张紧锤,4为系留缆,5为锚定,6为充电线,7为充电上阻尼块,8为水下直升机,9为下阻尼块,10为岸站系统,101为球壳,102为电池,104为充电接口a,105为耦合连接器,106为耦合线,107为耦合模块,108为通讯线,109为通讯模块,701为位置固定孔,702为水下充电线,703为无线充电模块,704为充电接口b,801为无线充电接收模块,802为固定杆,803为连接固定器,804为螺旋桨,805为螺旋桨接口,806为螺旋桨连接线,807为无线充电连接线,808为无线充电接口,809为水温传感器,810为水深传感器,811为控制器,812为水下耦合模块,813水下耦合线,814为充电电池,815为机壳,1001为卫星接收机,1002为网线,1003为服务器。
具体实施方式
59.下面结合附图及实施例对本发明做进一步的详细说明。
60.如图1所示,一种系缆式水下直升机剖面测量系统,包括水上浮球1、运行通道缆2、张紧锤3、系留缆4、锚定5、充电线6、充电上阻尼块7、水下直升机8、下阻尼块9和岸站系统10。水上浮球1部分在海面以上,部分在海面以下,为系统提供浮力以拉直运行通道缆2,以及为水下直升机8提供充电功能,并通过耦合方式得到水下直升机8的测量数据,再通过通讯模块将数据传给岸站系统10;
61.剖面测量时,水下直升机8启动螺旋桨,带动水下直升机8进入水中进行剖面测量,水下直升机8沿着运行通道缆2向海底运动,通过调节水下直升机8的螺旋桨转速来对下沉全过程进行控制直到到达指定深度,螺旋桨停止工作,在浮力作用下,水下直升机8沿着运行通道缆2上浮到充电上阻尼块7;水上浮球1通过耦合模块107收到水下直升机8的数据后,进行压缩打包,通过卫星发送回岸站系统10;岸站系统10可以通过卫星发送剖面测量频率、最深测量深度等参数给水上浮球1,水上浮球1通过耦合模块107将参数发送给水下直升机8,水下直升机8按照参数进行相应的测量工作;水上浮球1通过充电线6连接充电上阻尼块7,通过充电上阻尼块7为水下直升机8进行无线充电。
62.如图2所示,水上浮球1包括:充电接口a104、球壳101以及设于球壳101内的电池102、耦合连接器105、耦合模块107以及通讯模块109;
63.球壳101为高分子聚氨酯材料壳体或pe材质壳体;
64.通讯模块109通过通讯线108与耦合模块107连接,用于获得水下直升机8的测量数据,并将测量数据发送回岸站系统10,同时接收岸站系统10的预先设定的参数,并通过通讯线108发送给耦合模块107;
65.耦合模块107通过耦合线106与耦合连接器105连接,耦合连接器105套设在水上浮球1底部的运行通道缆2外;耦合模块107,用于与水下直升机8通讯;
66.球壳101外表面安装有充电接口a104,球壳101内的电池102通过充电线6与充电接口a104连接;
67.充电接口104通过充电线6与充电上阻尼块7连接。
68.水上浮球1包括球壳101、电池102、充电线6、充电接口a 104、耦合连接器105、耦合
线106、耦合模块107、通讯线108和通讯模块109。球壳101采用浮力材料,球壳为高分子聚氨酯材料壳体或pe材质壳体任意一种,为提供测量系统浮力;电池102通过充电线6和充电接口a 104与充电上阻尼块7相连,为水下直升机8提供无线充电,作为水下直升机8的续航电源;耦合模块107通过耦合线106和耦合连接器105与水下直升机8进行耦合通讯,以获得测量数据;通讯模块109通过通讯线108获得测量数据,通过卫星将测量数据发送回岸站系统10,并获得岸站系统10的设置参数,通过通讯线108传给耦合模块107,耦合方式传给水下直升机8,耦合模块107以及水下耦合模块812为成套使用,为市购产品,型号为:xkt801-43。
69.如图3所示,充电上阻尼块7内设有无线充电模块703;充电上阻尼块7中心开设有位置固定孔701,位置固定孔701固设于运行通道缆2上;
70.充电上阻尼块7顶部设有充电接口b704,充电接口a104经充电接口b704与无线充电模块703连接;
71.无线充电模块703设于水下直升机8上方,用于将接收水上浮球1内电池102的电流转化为电磁,以供水下直升机充电。
72.充电上阻尼块7包括位置固定孔701、水下充电线702、无线充电模块703和充电接口b 704。位置固定孔701提供充电上阻尼块7与运行通道缆2的固定位置,通过夹紧摩擦力将充电上阻尼块7固定在运行通道缆2上;充电线702连接充电接口a 104和充电接口b 704,通过无线充电模块703提供无线充电。
73.如图4所示,水下直升机8,包括:设于机壳815内的控制系统、以及设于机壳815上的无线充电接收模块801、固定杆802、连接固定器803、螺旋桨804、测量装置、控制系统以及水下耦合模块812;
74.机壳815侧壁水平平行设有多个连接板,连接板上设有限位孔,限位孔套设在运行通道缆2上,以实现沿运行通道缆2竖直运动;在任意一个连接板上设有水下耦合模块812,水下耦合模块812与控制系统连接;
75.机壳815顶部设有测量装置,用于测量水下剖面的测量数据;所述测量装置与控制系统连接;
76.机壳815顶部还设有无线充电接口808,无线充电接收模块801通过无线充电接口808与控制系统连接;
77.机壳815侧壁上还设有多个水平平行的连接固定器803,机壳815通过连接固定器803与固定杆802连接;
78.固定杆802的顶端设有无线充电接收模块801,固定杆802的底端设有螺旋桨804;螺旋桨804通过连接固定器803固设于机壳815下方,且螺旋桨804通过螺旋桨连接线806与控制系统连接;
79.无线充电接收模块801设于机壳815上方,且与充电上阻尼块7相对应。
80.控制系统设于机壳815内,包括:控制器811和充电电池814;
81.测量装置包括水温传感器809和水深传感器810;
82.控制器811分别与水温传感器809、水深传感器810和水下耦合模块812连接;用于接收水下剖面的水温数据和水深数据,并发送至水下耦合模块812;
83.无线充电接收模块801通过无线充电接口808与充电电池814连接。
84.螺旋桨804位于水下直升机8下端,以保证螺旋桨804一直在水中,通过螺旋桨接口
805和螺旋桨连接线806提供电源和控制,为水下直升机8提供动力;无线充电接收模块801位于水下直升机8的上端,当水下直升机8通过浮力停止在充电上阻尼块7处,无线充电模块703自动通过无线充电接收模块801、无线充电连接线807和无线充电接口808为充电电池814充电;固定杆802将水下直升机8的所有设备连接到一起;连接固定器803将设备固定到固定杆802上;水温传感器809和水深传感器810为控制器811提供水温和水深参数,控制器811根据水深参数等,控制螺旋桨804的转向和转速,控制器811通过水下耦合线813和水下耦合模块812将水温、水深等参数传给水上浮球1,螺旋桨804为三叶螺旋桨,桨叶长度为3cm~4cm。
85.如图5所示,岸站系统10包括卫星接收机1001、网线1002和服务器1003。卫星接收机1001接收卫星传回的测量数据,通过网线1002将数据传输到服务器1003,服务器将测量数据分析存储。
86.一种系缆式水下直升机剖面测量系统的测量方法,包括以下步骤:
87.1)通过配重将水下直升机8调节为正浮力状态;
88.2)剖面测量时,水下直升机8根据预先设定的参数控制螺旋桨804转动,形成向下作用力,带动水下直升机8沿着运行通道缆2向下运动,根据预先设定的参数和测量数据,控制螺旋桨804转速和转向以满足定深悬浮、不同下降速度要求;
89.3)完成指定海底深度的数据测量时,螺旋桨804停止工作,在正浮力的作用下,水下直升机8沿着运行通道缆2上浮至充电上阻尼块7处;充电上阻尼块7与无线充电接收模块801相抵,水下直升机8通过无线充电接收模块801和无线充电模块703进行电磁式无线充电,通过耦合模块107和水下耦合模块812将测量数据传输到通讯模块109;以使通讯模块109通过卫星将测量数据发送回岸站系统10,完成一次循环的剖面测量。
90.根据预先设定的参数和测量数据,控制螺旋桨804转速和转向以满足定深悬浮、不同下降速度要求,具体为:
91.通过控制占空比来控制螺旋桨转速和转向,为水下直升机剖面测量系统提供动力;
92.不同场景下的螺旋桨控制:
93.1)向下剖面测量:通过控制螺旋桨转向,提供向下的驱动力,控制转速为一个固定值,以一个固定的驱动力向下剖面运动,向下剖面测量过程中测量温度和深度,当到达设置的深度时,控制螺旋桨停止工作;
94.2)向上剖面测量:系统通过正浮力向上沿缆移动,移动过程中测量温度和深度,当检测到深度异常变化时,启动螺旋桨,控制转向和转速,提供系统向上的驱动力;
95.所述深度异常变化为:当海流流速超过2m/s时、水下直升机8的深度在设定时间内保持不变或深度增大任意一种情况;
96.3)悬停测量:当需要测量水下某固定剖面的深度发生连续变化时,到达指定深度后,若深度持续变大,控制螺旋桨804转速降低,实现向上驱动力,如果深度变小,控制螺旋桨804转速增加,实现向上驱动力,保证在该固定深度悬停。
97.上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本领域的技术人员在本发明的实质范围内所作出的变化、改型、添加或替换,也应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。