1.本发明涉及计算流体力学领域,具体地,涉及一种基于残值神经网络的气动数据建模方法及系统。
背景技术:
2.流场数据是描述流场各空间点物理性质的数据,由多种参数所决定,例如飞行高度、来流马赫数和迎角等参数,参数空间随着参数个数的增加呈现指数型增大。对于流体力学的某些工程问题,如飞行器的优化设计、流动控制和不确定度分析等,往往需要不同参数条件下的海量流场数据。目前,最为常用的求解流场数据的方法是使用传统的计算流体力学(computational fluid dynamics,cfd)求解。经过几十年的发展,cfd方法求解流场数据的精度很高,但是求解所需要的计算成本也很高,在部分问题中不可能被用于求解参数空间内多种参数组合的流场数据。
3.与此同时,不同参数组合下的流场数据具有内在的相似性,没有必要一一求解每个参数组合下的流场数据,可以利用不同参数组合下的流场数据的内在相似性来预测新的参数组合下的流场数据。流场数据在工程领域有着广泛的应用,但是使用传统的cfd方法求解流场数据的计算成本高,因此如何化解这二者之间的矛盾是一个具有重大现实意义的课题。众多学者围绕此课题做出了许多研究成果,大致分为两种思路。第一种思路构建替代模型,在工程应用中使用替代模型替代高精度的流场数据。第二种思路是将机器学习应用于流场重构,通过机器学习模型的建立,使用低计算成本求解高精度流场数据。机器学习的关键是通过直接分析收集到的数据的底层机制来开发算法,理论上机器学习模型可以建立任意两种变量之间的映射关系。近年来,随着机器学习在图像识别、语音识别、药物发现等领域的巨大成功,它在科学计算领域也显示出了巨大的潜力,计算流体动力学(cfd)领域已经成功应用机器学习的相关课题包括湍流模型、过渡模型、流动控制、非定常空气动力学预测等。总的来说,替代模型虽然已经发展了很多年,衍生出多种模型,但是由于其模型的局限性,求解流场数据的的可靠性及求解精度均有限。基于机器学习的流场重构正处于萌芽阶段,求解精度及效率均有很大潜力。
4.机器学习算法有很多,如前馈神经网络(artificial neural network,ann)和残差神经网络(residual neural network,resnet)等。残差神经网络的突出优势是成功解决了网络深度增加的副作用。对于神经网络,增加网络的宽度和深度可以很好的提高网络的性能,深的网络一般都比浅的网络效果好。但是普通的前馈神经网络在增加深度时,会面临梯度弥散或梯度爆炸等问题,训练过程中还会出现精度退化问题。而残差神经网络在增加深度时则不会出现上述问题,可以通过增加网络深度,来提高网络性能。将残差神经网络推广到气动数据建模,能大幅提高重构精度,有效应对可压缩流场的强非线性。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是将一种新的神经网络——残差神经网
络,应用至流场重构中。除了能保证与大多数机器学习算法可以大幅降低求解流场数据的计算成本的优点的同时,相较于最常用的前馈神经网络,残差神经网络进行流场重构的精度要比前人提出的基于前馈神经网络进行流场重构的精度高。
6.根据本发明提供的一种基于残值神经网络的气动数据建模方法,包括如下步骤:
7.控制方程建立步骤:建立控制方程;
8.缩减基维度计算步骤:本征正交分解算法计算缩减基维度;
9.流场重构步骤:基于机器学习流场重构。
10.优选地,所述控制方程建立步骤包括:
11.建立守恒定律表达:其中q为守恒变量,f为对流通量,g为粘性通量,t为时间项。对于二维n-s系统,有:
[0012][0013]
其中:ρ为密度,u、v分别为x、y方向的速度,e为能量,对流通量表达为:
[0014][0015]
对于理想气体:压力p=ρrt,r为气体状态常数,t为温度,且:
[0016][0017]
其中:γ为比热比。
[0018]
粘性通量表达为:
[0019][0020]
其中:
[0021][0022]
以及,
[0023][0024]
pr为普朗特常数,动力粘性系数μ由下式获得:
[0025][0026]
其中t
ref
=273.15k,μ
ref
=1.716
×
10-5
pa
·
s,ts=110.4k。
[0027]
优选地,所述缩减基维度计算步骤包括:
[0028]“快照解”矩阵构造步骤:选定一个流场参数集这里的代表个不同的流场参数,将流场参数集中的所有元素对应的“快照解”放到一个矩阵中,表示为:
[0029][0030]
其中:表示流场参数集中第m个元素对应的“快照解”;代表快照解的个数;nh代表每一个“快照解”的维数;对于一维问题,“快照解”表示为:
[0031][0032]
其中ρm、um、pm和mam分别代表密度、速度、压力以及马赫数的解向量;
[0033]
奇异值分解步骤:对“快照解”矩阵a进行奇异值分解:
[0034][0035]“快照解”矩阵经过svd后返回三个矩阵:u、v和σ,分别表示为:
[0036][0037][0038]
矩阵等价改写为:
[0039]
a=uλ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0040]
其中:λ为系数矩阵,系数向量λ为nh维;
[0041]
缩减基构造步骤:选取基矩阵u的前k列,来构造缩减基,记做“快照解”矩阵a近似表达为:
[0042][0043]
其中:
[0044][0045]
近似系数向量求解步骤:基于流场数据由近似系数向量代替;
[0046]
逆pod法求解步骤:逆pod过程求解出pod近似后的流场数据然后求解近似误差,给定一组流场数据sm,pod处理后的系数向量为:
[0047][0048]
跟据式(17),近似后的流场数据为:
[0049][0050]
得到近似后的流场数据,直接求解近似后的流场数据相对于原始流场数据sm的二阶范数相对误差:
[0051][0052]
优选地,所述流场重构步骤包括离线步骤,所述离线步骤包括:
[0053]
样本点选择步骤:在参数空间中选择样本点,组成训练参数集和校正参数集,并使用计算流体力学方法分别计算出训练参数集和校正参数集对应的简化问题解与目标问题解,构成训练集数据(a
sp
,a
tp
)和校正集数据(i
sp
,i
tp
),其中tp和sp分别代表目标问题和简化问题;
[0054]
pod处理步骤:分别对训练集的简化问题解与目标问题解进行pod处理,得到二者降维后的系数矩阵和缩减基矩阵根据公式(16),使用得到的缩减基矩阵分别求解出校正集简化问题解与目标问题解的系数矩阵
[0055]
机器学习模型训练步骤:训练机器学习模型,训练集简化问题解的系数矩阵和目标问题的系数矩阵分别作为模型的输入和输出;校正集数据用于评估训练的模型是否收敛,已经收敛则停止训练,反之则继续训练优化,直至收敛。
[0056]
优选地,所述流场重构步骤还包括在线步骤,所述在线步骤包括:
[0057]
在参数空间中选择样本点,组成测试参数集,并使用cfd计算出测试参数集对应的简化问题解t
sp
;
[0058]
根据公式(16),将简化问题解向离线阶段求解的缩减基投影,求解出简化问题的系数矩阵
[0059]
将测试集简化问题解的系数矩阵输入离线阶段训练好的模型,即可快速输出目标问题解的系数矩阵
[0060]
根据公式(14)对目标问题解的系数矩阵进行逆pod处理,重构出目标问题解——流场数据
[0061]
根据本发明提供的一种基于残值神经网络的气动数据建模系统,包括如下模块:
[0062]
控制方程建立模块:建立控制方程;
[0063]
缩减基维度计算模块:本征正交分解算法计算缩减基维度;
[0064]
流场重构模块:基于机器学习流场重构。
[0065]
优选地,所述控制方程建立模块包括:
[0066]
建立守恒定律表达:其中q为守恒变量,f为对流通量,g为粘性通量,t为时间项。对于二维n-s系统,有:
[0067][0068]
其中:ρ为密度,u、v分别为x、y方向的速度,e为能量,对流通量表达为:
[0069][0070]
对于理想气体:压力p=ρrt,r为气体状态常数,t为温度,且:
[0071][0072]
其中:γ为比热比。
[0073]
粘性通量表达为:
[0074][0075]
其中:
[0076][0077]
以及,
[0078][0079]
pr为普朗特常数,动力粘性系数μ由下式获得:
[0080][0081]
其中t
ref
=273.15k,μ
ref
=1.716
×
10-5
pa
·
s,ts=110.4k。
[0082]
优选地,所述缩减基维度计算模块包括:
[0083]“快照解”矩阵构造模块:选定一个流场参数集这里的代表个不同的流场参数,将流场参数集中的所有元素对应的“快照解”放到一个矩阵中,表示为:
[0084][0085]
其中:表示流场参数集中第m个元素对应的“快照解”;
代表快照解的个数;nh代表每一个“快照解”的维数;对于一维问题,“快照解”表示为:
[0086][0087]
其中ρm、um、pm和mam分别代表密度、速度、压力以及马赫数的解向量;
[0088]
奇异值分解模块:对“快照解”矩阵a进行奇异值分解:
[0089][0090]“快照解”矩阵经过svd后返回三个矩阵:u、v和σ,分别表示为:
[0091][0092][0093]
其中:ζ1,ζ2,......,ζr,ψ1,ψ2,......,ψr分别代表矩阵u,v的每一个分块列矩阵;σ1,σ2,......,σr代表对角矩阵σ的每一个元素。
[0094]
矩阵等价改写为:
[0095]
a=uλ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0096]
其中:λ为系数矩阵,系数向量λ为nh维;
[0097]
缩减基构造模块:选取基矩阵u的前k列,来构造缩减基,记做“快照解”矩阵a近似表达为:
[0098][0099]
其中:
[0100][0101]
近似系数向量求解模块:基于流场数据由近似系数向量代替;
[0102]
逆pod法求解模块:逆pod过程求解出pod近似后的流场数据然后求解近似误差,给定一组流场数据sm,pod处理后的系数向量为:
[0103][0104]
跟据式(17),近似后的流场数据为:
[0105][0106]
得到近似后的流场数据,直接求解近似后的流场数据相对于原始流场数据sm的二阶范数相对误差:
[0107]
[0108]
优选地,所述流场重构模块包括离线模块,所述离线模块包括:
[0109]
样本点选择模块:在参数空间中选择样本点,组成训练参数集和校正参数集,并使用计算流体力学方法分别计算出训练参数集和校正参数集对应的简化问题解与目标问题解,构成训练集数据(a
sp
,a
tp
)和校正集数据(i
sp
,i
tp
),其中tp和sp分别代表目标问题和简化问题;
[0110]
pod处理模块:分别对训练集的简化问题解与目标问题解进行pod处理,得到二者降维后的系数矩阵和缩减基矩阵根据公式(16),使用得到的缩减基矩阵分别求解出校正集简化问题解与目标问题解的系数矩阵
[0111]
机器学习模型训练模块:训练机器学习模型,训练集简化问题解的系数矩阵和目标问题的系数矩阵分别作为模型的输入和输出;校正集数据用于评估训练的模型是否收敛,已经收敛则停止训练,反之则继续训练优化,直至收敛。
[0112]
优选地,所述流场重构模块还包括在线模块,所述在线模块包括:
[0113]
在参数空间中选择样本点,组成测试参数集,并使用cfd计算出测试参数集对应的简化问题解t
sp
;
[0114]
根据公式(16),将简化问题解向离线阶段求解的缩减基投影,求解出简化问题的系数矩阵
[0115]
将测试集简化问题解的系数矩阵输入离线阶段训练好的模型,即可快速输出目标问题解的系数矩阵
[0116]
根据公式(14)对目标问题解的系数矩阵进行逆pod处理,重构出目标问题解——流场数据
[0117]
与现有技术相比,本发明具有如下的有益效果:
[0118]
1、与完全采用计算流体力学的方法对比,本发明具有大幅降低求解流场数据的计算成本的优点;
[0119]
2、相较于最常用的前馈神经网络,残差神经网络进行流场重构的精度比在先的基于前馈神经网络进行流场重构的精度高。
[0120]
3、本发明通过气动数据建模,流场降维以及通过机器学习重构流场的技术方案,具有计算成本低、计算效率高、计算精度高的优点。
附图说明
[0121]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0122]
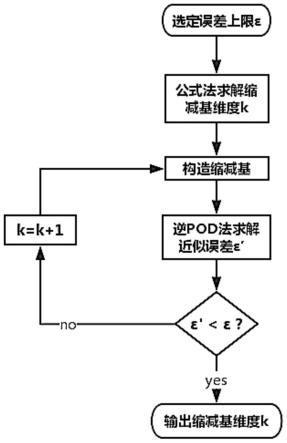
图1为本发明方法缩减基维度选择策略流程图。
[0123]
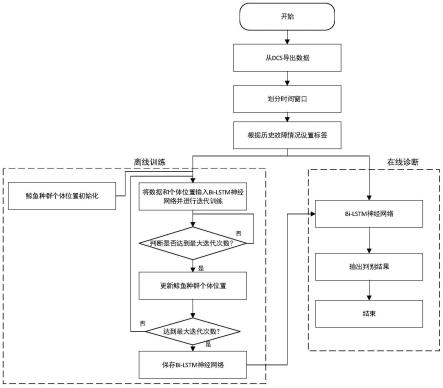
图2为本发明方法完整算法流程图。
具体实施方式
[0124]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术
人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0125]
如图1和图2所示,本发明提供了一种基于残值神经网络的气动数据建模方法及系统,基于残值神经网络的气动数据建模方法包括:
[0126]
步骤一:建立控制方程,具体包括如下子步骤:
[0127]
步骤11、本次研究使用机器学习进行流场重构,对于控制方程没有任何要求。守恒定律表达为:
[0128][0129]
其中q为守恒变量,f为对流通量,g为粘性通量,t为时间项。对于二维n-s系统,有:
[0130][0131]
其中:ρ为密度,u、v分别为x、y方向的速度,e为能量。
[0132]
步骤12、对流通量表达为:
[0133][0134]
其中:p为压力。
[0135]
步骤13、对于理想气体:p=ρrt,r为气体状态常数,t为温度,且:
[0136][0137]
其中:γ为比热比。
[0138]
步骤14、粘性通量表达为:
[0139][0140]
在这里,
[0141][0142]
以及,
[0143][0144]
其中:pr为普朗特常数。
[0145]
步骤15、动力粘性系数μ可以由下式推导出来,
[0146][0147]
其中t
ref
=273.15k,μ
ref
=1.716
×
10-5
pa
·
s,ts=110.4k。
[0148]
三维的n-s控制方程可以直接扩展二维n-s控制方程得到,在这里就不再赘述。
[0149]
步骤二:本征正交分解(pod)算法缩减基维度,完整算法流程如附图1所示,具体包括如下子步骤:
[0150]
步骤21、构造“快照解”矩阵。选定一个流场参数集这个集合的每一个元素(也可称为样本点)代表着一组流场参数组合,例如二维naca0012翼型绕流流场中的一组参数组合——马赫数等于0.5马赫,迎角等于3度。在选择流场参数集中的元素时尽可能保证所选取的元素包含整个参数空间的信息,常用的选取策略是在整个参数空间等距选择样本点。对应每一个流场参数组合,使用cfd软件计算求解到该参数组合下的流场数据,该流场数据在文献中被称为“快照解”。将流场参数集中的所有元素对应的“快照解”放到一个矩阵中,表示为:
[0151][0152]
在这里表示流场参数集中第个元素对应的“快照解”。代表流场参数集中元素的个数,也就是快照解的个数。nh代表每一个“快照解”的维数。下面以一维问题为例,“快照解”可以表示为:
[0153][0154]
其中ρm、um、pm和mam分别代表密度、速度、压力以及马赫数的解向量。
[0155]
步骤22、奇异值分解。对“快照解”矩阵a进行奇异值分解(svd):
[0156][0157]“快照解”矩阵经过svd后会返回三个矩阵:u、v和σ,可以分别表示为:
[0158][0159][0160]
其中:ζ1,ζ2,......,ζr,ψ1,ψ2,......,ψr分别代表矩阵u,v的每一个分块列矩阵;σ1,σ2,......,σr代表对角矩阵σ的每一个元素。
[0161]
在这里值得注意的是,u是nh维解空间的基矩阵,任意一个流场数据均可由基矩阵中的基向量线性组合而成。因此矩阵可以等价改写为:
[0162]
a=uλ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0163]
λ被称为系数矩阵,代表着流场数据在解空间各方向基上的投影长度,可以由公
式λ=u
t
a求解。对于同一种模型下的流场数据,基矩阵u是固定不变的,不同的流场数据仅仅对应着不同的系数向量λ。因此理论上,在已知基矩阵u的情况下,只需求解系数向量λ后即可获取流场数据,在这里系数向量λ为nh维。
[0164]
步骤23、提取主模态,构造缩减基。svd可以理解成模态分解,基矩阵u的列向量代表着各阶模态。流场数据的维度通常情况下非常高,但是其内在存在一定的相似性,其数据的能量主要集中在低阶模态。为了降低流场数据的维度,在这里忽略流场数据中能量较小的高阶模态,只关注低阶模态的影响,因此选取基矩阵u的前k列,即前k阶模态,来构造缩减基,记做此时“快照解”矩阵a可以近似表达为:
[0165][0166]
在这里有:
[0167][0168]
步骤24、求解近似系数向量,实现降维。当确定之后,根据式(16),流场数据即可由近似系数向量代替,此时的维度是k,远小于流场数据的维度从而实现降维。
[0169][0170]
步骤25、逆pod法求解近似误差。逆pod法求解近似误差是从pod处理后的系数向量出发,逆pod过程求解出pod近似后的流场数据然后求解近似误差,给定一组流场数据sm,根据式(16)可知,pod处理后的系数向量为:
[0171][0172]
跟据式(17),近似后的流场数据为:
[0173][0174]
得到近似后的流场数据,直接求解近似后的流场数据相对于原始流场数据sm的二阶范数相对误差:
[0175][0176]
逆pod法求解近似误差是基于误差的定义,考虑到所有产生误差的因素,计算出来的结果是最准确的近似误差。
[0177]
步骤三:基于机器学习流场重构,完整算法流程如附图2所示,具体包括如下子步骤:
[0178]
步骤31、离线阶段。离线阶段第一步是在参数空间中选择样本点,组成训练参数集和校正参数集,并使用计算流体力学方法(cfd)分别计算出训练参数集和校正参数集对应的简化问题解与目标问题解,构成训练集数据(a
sp
,a
tp
)和校正集数据(i
sp
,i
tp
)(上标tp和sp分别代表目标问题和简化问题)。
[0179]
步骤32、离线阶段第二步是分别对训练集的简化问题解与目标问题解进行pod处
理,得到二者降维后的系数矩阵和缩减基矩阵根据公式(16),使用前面得到的缩减基矩阵分别求解出校正集简化问题解与目标问题解的系数矩阵
[0180]
步骤33、离线阶段第三步是训练机器学习模型,训练集简化问题解的系数矩阵和目标问题的系数矩阵分别作为模型的输入和输出。校正集数据用于评估训练的模型是否收敛,已经收敛则停止训练,反之则继续训练优化,直至收敛。
[0181]
步骤34、在线阶段。在线阶段第一步是在参数空间中选择样本点,组成测试参数集,并使用cfd计算出测试参数集对应的简化问题解t
sp
。
[0182]
步骤35、在线阶段第二步根据公式(16),将简化问题解向离线阶段求解的缩减基投影,求解出简化问题的系数矩阵
[0183]
步骤36、在线阶段第三步将测试集简化问题解的系数矩阵输入离线阶段训练好的模型,即可快速输出目标问题解的系数矩阵第四步,根据公式(14)对目标问题解的系数矩阵进行逆pod处理即可快速重构出目标问题解——流场数据
[0184]
总的来说,离线阶段需要耗费一定量的计算成本,但是一旦离线阶段完成之后,在线阶段即可实现以很小的计算成本获取高精度的流场数据。
[0185]
根据本发明提供的一种基于残值神经网络的气动数据建模系统,包括控制方程建立模块:建立控制方程;缩减基维度计算模块:本征正交分解算法计算缩减基维度;流场重构模块:基于机器学习流场重构。
[0186]
所述控制方程建立模块包括:
[0187]
建立守恒定律表达:其中q为守恒变量,f为对流通量,g为粘性通量,t为时间项。对于二维n-s系统,有:
[0188][0189]
其中:ρ为密度,u、v分别为x、y方向的速度,e为能量,对流通量表达为:
[0190][0191]
对于理想气体:压力p=ρrt,r为气体状态常数,t为温度,且:
[0192][0193]
其中:γ为比热比。
[0194]
粘性通量表达为:
[0195][0196]
其中:
[0197][0198]
以及,
[0199][0200]
pr为普朗特常数,动力粘性系数μ由下式获得:
[0201][0202]
其中t
ref
=273.15k,μ
ref
=1.716
×
10-5
pa
·
s,ts=110.4k。
[0203]
所述缩减基维度计算模块包括:
[0204]“快照解”矩阵构造模块:选定一个流场参数集这里的代表个不同的流场参数,将流场参数集中的所有元素对应的“快照解”放到一个矩阵中,表示为:
[0205][0206]
其中:表示流场参数集中第m个元素对应的“快照解”;代表快照解的个数;nh代表每一个“快照解”的维数;对于一维问题,“快照解”表示为:
[0207][0208]
其中ρm、um、pm和mam分别代表密度、速度、压力以及马赫数的解向量;
[0209]
奇异值分解模块:对“快照解”矩阵a进行奇异值分解:
[0210][0211]“快照解”矩阵经过svd后返回三个矩阵:u、v和σ,分别表示为:
[0212][0213][0214]
其中:ζ1,ζ2,......,ζr,ψ1,ψ2,......,ψr分别代表矩阵u,v的每一个分块列矩阵;σ1,σ2,......,σr代表对角矩阵σ的每一个元素。
[0215]
矩阵等价改写为:
[0216]
a=uλ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0217]
其中:λ为系数矩阵,系数向量λ为nh维;
[0218]
缩减基构造模块:选取基矩阵u的前k列,来构造缩减基,记做“快照解”矩阵a近似表达为:
[0219][0220]
其中:
[0221][0222]
近似系数向量求解模块:基于流场数据由近似系数向量代替;
[0223]
逆pod法求解模块:逆pod过程求解出pod近似后的流场数据然后求解近似误差,给定一组流场数据sm,pod处理后的系数向量为:
[0224][0225]
跟据式(17),近似后的流场数据为:
[0226][0227]
得到近似后的流场数据,直接求解近似后的流场数据相对于原始流场数据sm的二阶范数相对误差:
[0228][0229]
所述流场重构模块包括离线模块,所述离线模块包括:样本点选择模块:在参数空间中选择样本点,组成训练参数集和校正参数集,并使用计算流体力学方法分别计算出训练参数集和校正参数集对应的简化问题解与目标问题解,构成训练集数据(a
sp
,a
tp
)和校正集数据(i
sp
,i
tp
),其中tp和sp分别代表目标问题和简化问题;pod处理模块:分别对训练集的简化问题解与目标问题解进行pod处理,得到二者降维后的系数矩阵和缩减基矩阵根据公式(16),使用得到的缩减基矩阵分别求解出校正集简化问题解与目标问题解的系数矩阵机器学习模型训练模块:训练机器学习模型,训练集简化问题解的系数矩阵和目标问题的系数矩阵分别作为模型的输入和输出;校正集数据用于评估训练的模型是否收敛,已经收敛则停止训练,反之则继续训练优化,直至收敛。
[0230]
所述流场重构模块还包括在线模块,所述在线模块包括:在参数空间中选择样本点,组成测试参数集,并使用cfd计算出测试参数集对应的简化问题解t
sp
;根据公式(16),将简化问题解向离线阶段求解的缩减基投影,求解出简化问题的系数矩阵将测试集简化问题解的系数矩阵输入离线阶段训练好的模型,即可快速输出目标问题解的系数矩
阵根据公式(14)对目标问题解的系数矩阵进行逆pod处理,重构出目标问题解——流场数据
[0231]
残差神经网络的突出优势是成功解决了网络深度增加的副作用。对于神经网络,增加网络的宽度和深度可以很好的提高网络的性能,深的网络一般都比浅的网络效果好。但是普通的前馈神经网络在增加深度时,会面临梯度弥散或梯度爆炸等问题,训练过程中还会出现精度退化问题。而残差神经网络在增加深度时则不会出现上述问题,可以通过增加网络深度,来提高网络性能。将残差神经网络推广到气动数据建模,能大幅提高重构精度,有效应对可压缩流场的强非线性。
[0232]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0233]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。