一种基于pio-lssvm的短期负荷预测方法
技术领域
1.本发明涉及pio-lssvm负荷预测领域,更具体地说,它涉及一种基于pio-lssvm的短期负荷预测方法。
背景技术:
2.负荷预测是电力部门的重要工作内容之一,在电力系统规划、运行、调度中有着重要作用。准确的负荷预测结果能够保证电力系统的可靠、经济运行。
3.在负荷预测技术发展早期,负荷预测方法主要为传统预测法,一般包括自回归滑动平均法、回归分析法、卡尔曼滤波法和指数平滑法等,这些方法都是通过分析输入和输出之间的线性关系来建立预测模型并进行预测,在负荷保持稳定的前提下,这些方法能快速有效的得到预测结果;近年来,人工智能算法被大量应用于负荷预测领域,主要包括模糊逻辑法,专家系统法,人工神经网络,支持向量机法等,以上方法相较于传统的预测方法有了很大的提升、但难以兼顾到负荷数据与的其他外部因素的相关性,其中,最小二乘支持向量机lssvm(cleast squares support veotor machine)可通过求解二次规划问题得到全局最优解,建模时需确定多个参数,建模难度大,克服神经网络易陷入局部最优解的缺陷。
4.但是,伴随着智能电表的接入,用户数据海量增加,数据复杂程度不断加大,负荷的变化受各种因素的影响,传统预测方法无法有效分析日类型、用户类型等外界因素对预测结果的影响,当这些因素出现较大变化时,负荷也将随之变化,传统预测模型和单一的人工智能算法无法有效利用海量外部因素数据,传统预测法和单一的人工智能算法不能满足当今高精度负荷预测的要求。
技术实现要素:
5.本发明的目的是提供一种基于pio-lssvm的短期负荷预测方法,利用海量外部因素数据,该模型以负荷数据和气象、经济信息为输入因子,引入鸽群优化算法优化模型参数,通过仿真验证了改进预测模型的准确性和有效性。
6.本发明的上述技术目的是通过以下技术方案得以实现的:一种基于pio-lssvm的短期负荷预测方法,包括以下步骤:(1)选取气温、日类型、经济等影响电力负荷量的关键因素,并将这些关键影响因素和电力负荷量的样本归一化数据组成lssvm点对构成的训练样本集d;
7.(2)初始化参数:根据实际需要设定模型的种群规模m1、最大迭代次数nc、地磁因子r以及个体鸽子的初始位置和速度等,个体鸽子的位置代表lssvm模型的参数c、σ或c、d;
8.(3)pio-lssvm的参数优化:基于lssvm的训练样本集,以(其中y
′i为归一化后的训练集数据向量的第i个元素;为svm模型的输出向量的第i个元素)中训练误差fe作为适应度函数,采用改进pio算法,选定lssvm参数的初值,并通过地图模型和地标模型的操作,通过pio算法原理对鸽子位置和速度进行迭代更新,根据适应度函数值选
取当前单个鸽子最佳位置和当前种群整体最佳位置;
9.(4)训练lssvm预测模型:根据步骤(3)中最小训练误差对应的最佳参数对lssvm进行设置,选择径向基核函数或多项式核函数训练一次lssvm,并基于训练得到的模型对预测集点对样本进行回归预测和反归一化处理;
10.(5)评价预测模型:评价lssvm模型的预测精度,若不符合要求,转至步骤(3),将更新后的正则化参数c、核函数宽度参数σ或维数参数d代入lssvm模型,对产生的新种群重新进行lssvm训练,并保存各次迭代中适应度最好的个体,直到达到最大迭代次数为止;
11.(6)输出预测结果:基于获取最优参数的pio-lssvm模型输出电力需求总量预测结果,并与实际值进行比较分析。
12.优选地,所述步骤(2)中,将实验数据作为训练样本进行lssvm预测模型的训练,为验证模型的准确性,选取部分实验数据作为测试样本用于对建立好的lssvm预测模型的预测精度进行检验。
13.优选地,步骤(3)中的所述pio算法原理为基于地磁场建立地图模型,在二维空间中用zi表示第i只鸽子的位置,用vi表示第i只鸽子的速度,则鸽子k的位置zk和速度vk可表示为:
14.z zk=[z
k1
,z
k2
,...,z
km
]
[0015]vk
=[v
k1
,v
k2
,...,v
km
]
[0016]
式中,k=1,2,
…
,m1;m1为鸽群的种群数量;m为优化对象的维数。
[0017]
优选地,所述步骤(3)还包括以下步骤:鸽子的位置和速度通过每次优化迭代进行更新,鸽子的当前速度由其上一代速度、上一代位置和最优位置共同决定,相应更新公式如下:
[0018]vi
(t)=vi(t-1)e-rt
r
an
(z
g-zi(t-1))
[0019]
zi(t)=zi(t-1) vi(t)
[0020]
式中,t为当前迭代次数,r为地磁因子,r∈[0,1];zg为通过比较所有鸽子的位置得到的当前种群中全局最优位置;r
an
表示[0,1]之间的随机数,当迭代次数达到所要求的最大值后,停止在地图模型中鸽群的优化工作,进人地标模型进行搜索。
[0021]
优选地,所述步骤(3)还包括以下步骤:地标模型是模拟鸽子靠近口的地时更多依赖附近地标直接飞向口标的特性,离口的地较远的鸽子对口标附近的地标不熟悉,不具有辨识路径的能力,可直接淘汰舍去,这将使每次迭代后鸽子的数量减少一半,目的地附近的鸽子将成为鸽群的中心,带领其他鸽子飞向口标,循环迭代至最大次数,结束地标模型中的算法工作。
[0022]
优选地,所述lssvm的目标函数如下:
[0023][0024]
式中w为权重向量;ek为误差;c为惩罚因子。
[0025]
优选地,所述lssvm预测模型由如下:
[0026]
[0027]
式中x表示m维输入向量;xk为第i个径向基函数的中心;σ为标准化参数;||x-xk||为向量x-xk的范数。
[0028]
综上所述,本发明达到的有益效果是:第一,利用海量外部因素数据,该模型以负荷数据和气象、经济信息为输入因子,引入鸽群优化算法优化模型参数,通过仿真验证了改进预测模型的准确性和有效性。
[0029]
第二,通过每次迭代舍去偏离口标的个体,既确保了算法的较优信息又提高了算法迭代效率。
附图说明
[0030]
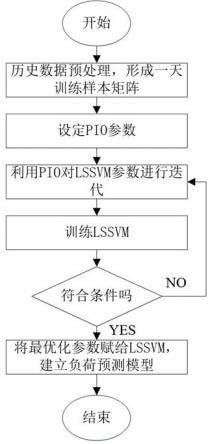
图1是本实施例的具体流程图。
具体实施方式
[0031]
以下结合附图对本发明作进一步详细说明。
[0032]
一种基于pio-lssvm的短期负荷预测方法,如图1,包括以下步骤:包括以下步骤:(1)选取气温、日类型、经济等影响电力负荷量的关键因素,并将这些关键影响因素和电力负荷量的样本归一化数据组成lssvm点对构成的训练样本集d;
[0033]
(2)初始化参数:根据实际需要设定模型的种群规模m1、最大迭代次数nc、地磁因子r以及个体鸽子的初始位置和速度等,个体鸽子的位置代表lssvm模型的参数c、σ或c、d;
[0034]
(3)pio-lssvm的参数优化:基于lssvm的训练样本集,以(其中y
′i为归一化后的训练集数据向量的第i个元素;为svm模型的输出向量的第i个元素)中训练误差fe作为适应度函数,采用改进pio算法,选定lssvm参数的初值,并通过地图模型和地标模型的操作,通过pio算法原理对鸽子位置和速度进行迭代更新,根据适应度函数值选取当前单个鸽子最佳位置和当前种群整体最佳位置;
[0035]
(4)训练lssvm预测模型:根据步骤(3)中最小训练误差对应的最佳参数对lssvm进行设置,选择径向基核函数或多项式核函数训练一次lssvm,并基于训练得到的模型对预测集点对样本进行回归预测和反归一化处理;
[0036]
(5)评价预测模型:评价lssvm模型的预测精度,若不符合要求,转至步骤(3),将更新后的正则化参数c、核函数宽度参数σ或维数参数d代入lssvm模型,对产生的新种群重新进行lssvm训练,并保存各次迭代中适应度最好的个体,直到达到最大迭代次数为止;
[0037]
(6)输出预测结果:基于获取最优参数的pio-lssvm模型输出电力需求总量预测结果,并与实际值进行比较分析。
[0038]
其中步骤(2)中,将实验数据作为训练样本进行lssvm预测模型的训练,为验证模型的准确性,选取部分实验数据作为测试样本用于对建立好的lssvm预测模型的预测精度进行检验,本发明利用海量外部因素数据,该模型以负荷数据和气象、经济信息为输入因子,引入鸽群优化算法优化模型参数,通过仿真验证了改进预测模型的准确性和有效性。
[0039]
lssvm模型对电力需求总量变化趋势进行预测,并引人基于pio算法的参数优化技术来提高lssvm预测短期负荷量的精度和收敛速度,lssvm最小二乘支持向量机将最小二乘线性系统引入支持向量机,最小二乘支持向量机的优化指数采用平方项,采用等式约束用
于替换标准支持向量机方法中的不等式约束,并把标准支持向量机中解的二次规划问题简化成求解线性方程问题,lssvm的目标函数如下:
[0040][0041]
式中w为权重向量;ek为误差;c为惩罚因子。
[0042]
lssvm预测模型由如下:
[0043][0044]
式中x表示m维输入向量;xk为第i个径向基函数的中心;σ为标准化参数;||x-xk||为向量x-xk的范数。
[0045]
在ls-svm建模过程中,有必要确定两个参数c和σ,c值越小,偏差惩罚越小,支持向量机回归曲线就越平稳,越有可能导致学习不足;c值越高,偏差惩罚越大,大部分点都可以满足,可能导致过度学习;当σ很小,可能会发生局部优化,能够导致svm产生过训练;如果σ很大,则很容易发生欠训练,因此需要pio算法进行lssvm的c、σ参数自寻找。
[0046]
pio算法是近年来由模拟自然界中鸽子归巢行为而提出的一种群体智能优化算法域中展现出收敛速度快、鲁棒性强,其在众多领的优越特性,步骤(3)中的所述pio算法原理为基于地磁场建立地图模型,在二维空间中用zi表示第i只鸽子的位置,用vi表示第i只鸽子的速度,则鸽子k的位置zk和速度vk可表示为:
[0047]
z zk=[z
k1
,z
k2
,...,z
km
]
[0048]vk
=[v
k1
,v
k2
,...,v
km
]
[0049]
式中,k=1,2,
…
,m1;m1为鸽群的种群数量;m为优化对象的维数。
[0050]
步骤(3)还包括以下步骤:鸽子的位置和速度通过每次优化迭代进行更新,鸽子的当前速度由其上一代速度、上一代位置和最优位置共同决定,相应更新公式如下:
[0051]vi
(t)=vi(t-1)e-rt
r
an
(z
g-zi(t-1))
[0052]
zi(t)=zi(t-1) vi(t)
[0053]
式中,t为当前迭代次数,r为地磁因子,r∈[0,1];zg为通过比较所有鸽子的位置得到的当前种群中全局最优位置;r
an
表示[0,1]之间的随机数,当迭代次数达到所要求的最大值后,停止在地图模型中鸽群的优化工作,进人地标模型进行搜索。
[0054]
步骤(3)还包括以下步骤:地标模型是模拟鸽子靠近口的地时更多依赖附近地标直接飞向口标的特性,离口的地较远的鸽子对口标附近的地标不熟悉,不具有辨识路径的能力,可直接淘汰舍去,这将使每次迭代后鸽子的数量减少一半,目的地附近的鸽子将成为鸽群的中心,带领其他鸽子飞向口标,通过每次迭代舍去偏离口标的个体,既确保了算法的较优信息又提高了算法迭代效率,循环迭代至最大次数,结束地标模型中的算法工作。
[0055]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。