1.本发明涉及集装箱生产技术领域,具体为一种集装箱自动焊接组装平台。
背景技术:
2.标准的集装箱具有两个侧板,对称设置在集装箱的左右两侧,侧板的生产流程按先后顺序通常包括以下步骤:拼板、拼板焊接、顶侧梁装配、侧板焊接、侧立传输、反补以及向总装配台输送,顶侧梁的装配以及侧板的焊接分别在顶侧梁装配胎位和侧板焊接胎位的一侧进行,生产出来的侧板均按照同一个朝向(例如所有侧板均箱内面朝外)放置,在输送至总装配台前需要对其中一部分侧板进行翻转。
3.人工焊接集装箱顶侧板时通常需要操作人员先将相邻侧板完成拼接,再手持焊枪焊接铝条的连接处,由于集装箱顶侧板面积较大,因此,人工焊接框架的技术技能要求较高,一般需要技术熟练的老师傅对新上任的操作人员进行一段时间的培训才能上岗,漫长的培训时间不能满足企业对于应聘人员立即上岗的需求;而且人工焊接过程中容易产生一些有毒物质,如:乙醛、松香酸、硫化物、异氰酸盐、氮氧化物等,并在空气中飞扬,这些有毒物质容易通过呼吸道侵入人的肝、肺、心血管及血液中,焊接过程中还会产生α、β、γ三种射线,这些放射性物质会少量积蓄的体内,因此,人工焊接过程中产生的有毒物质和放射性物质可能会危害操作人员的身体健康,造成操作人员一些职业病的发生。上述情况通常导致企业该岗位的操作人员紧缺,企业的产能吃紧。与此同时,人工焊接操作繁琐,工作效率低,无法满足企业相关产品的批量发展趋势;人工焊接产生的误差也较大,会造成产品质量不稳定,焊接工作效率低下。
技术实现要素:
4.本发明旨在解决现有技术或相关技术中存在的技术问题之一。
5.为此,本发明所采用的技术方案为:一种集装箱自动焊接组装平台,包括:焊接机器臂、运动导台、运动夹台和定位锁止组件以及用于输入控制指令的控制机柜,所述焊接机器臂和运动导台固定于底面且焊接机器臂位于运动导台一侧中线上,所述控制机柜的输出端与焊接机器臂、运动导台、运动夹台和定位锁止组件的输入端电性连接,所述定位锁止组件固定安装于运动夹台的表面,所述运动夹台包括滑动安装于运动导台表面的夹台运动座和焊接立架、伺服夹头组件,所述焊接立架固定安装于夹台运动座顶面的两端,所述伺服夹头组件固定安装于焊接立架的顶端。
6.本发明在一较佳示例中可以进一步配置为:所述伺服夹头组件包括伺服翻转舵机、第一夹头和第二夹头,所述第一夹头和第二夹头之间固定安装有液压缸,所述液压缸的两端分别与第一夹头和第二夹头表面固定连接,所述伺服翻转舵机的输出端与第一夹头的表面固定连接。
7.进一步的,所述第一夹头和第二夹头呈l形结构,所述第一夹头滑动安装于第二夹头的表面,利用第一夹头和第二夹头进行固定夹持。
8.本发明在一较佳示例中可以进一步配置为:所述定位锁止组件包括锁止环和液压夹头,所述锁止环固定套接于伺服翻转舵机输出轴的外侧,所述液压夹头固定安装于焊接立架的表面,且液压夹头的内侧与锁止环的表面滑动抵接。
9.进一步的,所述液压夹头的内侧设有液压驱动缸,所述液压驱动缸的输出端固定连接有夹片,所述夹片为复合陶瓷纤维片结构,且夹片表面为糙面结构,所述液压夹头的表面设有若干通孔并均匀分布,利用糙面夹片和通孔结构提高锁止环和液压夹头之间的夹持摩擦。
10.通过采用上述技术方案,通过锁止环和液压夹头之间的液压夹持保持伺服翻转舵机的偏转角从而保持物料翻转后的定位。
11.本发明在一较佳示例中可以进一步配置为:所述运动导台包括移动滑轨和丝杆导轨,所述丝杆导轨固定安装于移动滑轨的表面,所述丝杆导轨的内部设有电机以及与电机输出端固定连接的丝杆,所述夹台运动座的底面固定安装有螺纹套接于丝杆外侧的螺纹套块。
12.通过采用上述技术方案,利用运动导台内部伺服丝杆结构进行驱动运动夹台以及夹持的侧板进行运动配合焊接机器臂进行焊接操作,实现自动化焊接操作。
13.本发明在一较佳示例中可以进一步配置为:所述焊接机器臂、丝杆导轨和伺服夹头组件为伺服电机结构,所述焊接机器臂的内部设有plc控制器或单片机中的一种。
14.通过采用上述技术方案,利用可编程plc控制器或单片机进行编程控制从而实现焊接设备平台的数控化操作。
15.本发明所取得的有益效果为:
16.1.本发明中,通过设置自动化伺服运动结构,利用plc编程控制运动导台和运动夹台固定旋转平台在转动驱动机构的驱动下可自动转动,实现工件上不同焊点的切换焊接,较现有的通过机械手或轨道控制焊枪的移动来实现工件上多个点位的焊接,对于集装箱顶侧板大面积焊接效率显著提升。
17.2.本发明中,通过设置自动定位结构,利用第一夹头和第二夹头进行板材的定位夹持并通过锁止环和液压夹头对伺服翻转舵机的偏转角度进行锁止保持板件位置从而进行精准定位锁止,保证焊接的精准性。
附图说明
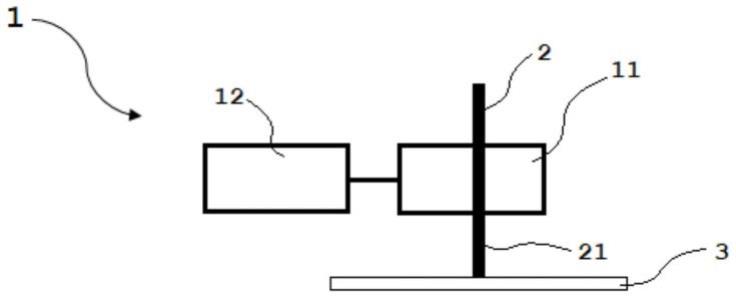
18.图1为本发明一个实施例的整体结构示意图;
19.图2为本发明一个实施例的运动导台结构示意图;
20.图3为本发明一个实施例的伺服夹头组件结构示意图;
21.图4为本发明一个实施例的定位锁止组件结构示意图。
22.附图标记:
23.100、焊接机器臂;
24.200、运动导台;210、移动滑轨;220、丝杆导轨;
25.300、运动夹台;310、夹台运动座;320、焊接立架;330、伺服夹头组件;331、伺服翻转舵机;332、第一夹头;333、第二夹头;
26.400、定位锁止组件;410、锁止环;420、液压夹头;
27.500、控制机柜。
具体实施方式
28.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
29.该理解,这些描述只是示例性的,而并非要限制本发明的范围。
30.下面结合附图描述本发明的一些实施例提供的一种集装箱自动焊接组装平台。
31.结合图1-4所示,本发明提供的一种集装箱自动焊接组装平台,包括:焊接机器臂100、运动导台200、运动夹台300和定位锁止组件400以及用于输入控制指令的控制机柜500,焊接机器臂100和运动导台200固定于底面且焊接机器臂100位于运动导台200一侧中线上,控制机柜500的输出端与焊接机器臂100、运动导台200、运动夹台300和定位锁止组件400的输入端电性连接,定位锁止组件400固定安装于运动夹台300的表面,运动夹台300包括滑动安装于运动导台200表面的夹台运动座310和焊接立架320、伺服夹头组件330,焊接立架320固定安装于夹台运动座310顶面的两端,伺服夹头组件330固定安装于焊接立架320的顶端。
32.在该实施例中,伺服夹头组件330包括伺服翻转舵机331、第一夹头332和第二夹头333,第一夹头332和第二夹头333之间固定安装有液压缸,液压缸的两端分别与第一夹头332和第二夹头333表面固定连接,伺服翻转舵机331的输出端与第一夹头332的表面固定连接,利用plc编程控制运动导台200和运动夹台300固定旋转平台在转动驱动机构的驱动下可自动转动,实现工件上不同焊点的切换焊接。
33.进一步的,第一夹头332和第二夹头333呈l形结构,第一夹头332滑动安装于第二夹头333的表面,利用第一夹头332和第二夹头333进行固定夹持,进行自动化焊接对于集装箱顶侧板大面积焊接效率显著提升。
34.在该实施例中,定位锁止组件400包括锁止环410和液压夹头420,锁止环410固定套接于伺服翻转舵机331输出轴的外侧,液压夹头420固定安装于焊接立架320的表面,且液压夹头420的内侧与锁止环410的表面滑动抵接。
35.进一步的,液压夹头420的内侧设有液压驱动缸,液压驱动缸的输出端固定连接有夹片,夹片为复合陶瓷纤维片结构,且夹片表面为糙面结构,液压夹头420的表面设有若干通孔并均匀分布,利用糙面夹片和通孔结构提高锁止环410和液压夹头420之间的夹持摩擦。
36.具体的,通过锁止环410和液压夹头420之间的液压夹持保持伺服翻转舵机331的偏转角从而保持物料翻转后的定位,利用第一夹头332和第二夹头333进行板材的定位夹持并通过锁止环410和液压夹头420对伺服翻转舵机331的偏转角度进行锁止保持板件位置从而进行精准定位锁止,保证焊接的精准性。
37.在该实施例中,运动导台200包括移动滑轨210和丝杆导轨220,丝杆导轨220固定安装于移动滑轨210的表面,丝杆导轨220的内部设有电机以及与电机输出端固定连接的丝杆,夹台运动座310的底面固定安装有螺纹套接于丝杆外侧的螺纹套块。
38.具体的,利用运动导台200内部伺服丝杆结构进行驱动运动夹台300以及夹持的侧
板进行运动配合焊接机器臂100进行焊接操作,实现自动化焊接操作。
39.在该实施例中,焊接机器臂100、丝杆导轨220和伺服夹头组件330为伺服电机结构,焊接机器臂100的内部设有plc控制器或单片机中的一种。
40.具体的,利用可编程plc控制器或单片机进行编程控制从而实现焊接设备平台的数控化操作。
41.在本发明中,术语“多个”则指两个或两个以上,除非另有明确的限定。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
42.需要说明的是,当元件被称为“装配于”、“安装于”、“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
43.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
44.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解,在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。