技术特征:
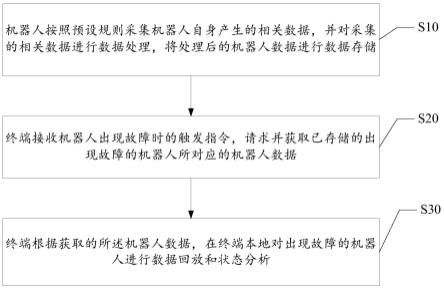
1.一种机器人故障检测方法,其特征在于,所述机器人故障检测方法包括:机器人按照预设规则采集机器人自身产生的相关数据,并对采集的相关数据进行数据处理,将处理后的机器人数据进行数据存储;终端接收机器人出现故障时的触发指令,请求并获取已存储的出现故障的机器人所对应的机器人数据;终端根据获取的所述机器人数据,在终端本地对出现故障的机器人进行数据回放和状态分析。2.如权利要求1所述的机器人故障检测方法,其特征在于,所述机器人按照预设规则采集机器人自身产生的相关数据,包括:机器人实时监控自身在运行过程中产生的所有相关数据,识别所有相关数据的数据类型;若所述相关数据对应的数据类型是:由机器人的传感器产生的传感器数据,则进入步骤:对采集的相关数据进行数据处理;若所述相关数据对应的数据类型是:机器人运行期间产生的日志数据,则判断所述日志数据是否属于预设预警数据;若所述日志数据不属于所述预设预警数据,则将所述日志数据丢弃;若所述日志数据属于所述预设预警数据,则进入步骤:对采集的相关数据进行数据处理。3.如权利要求1所述的机器人故障检测方法,其特征在于,所述对采集的相关数据进行数据处理,并将处理后的机器人数据进行数据存储,包括:利用通用的二进制序列化数据处理工具,对采集到的相关数据进行序列化处理,得到处理后的序列化数据;针对得到的所述序列化数据,采用流式压缩算法进行实时压缩存储。4.如权利要求1或2或3所述的机器人故障检测方法,其特征在于,所述将处理后的机器人数据进行数据存储,包括:针对处理后的机器人数据,获取与所述机器人数据相匹配的存储策略;利用与所述机器人数据相匹配的存储策略,进行数据存储;其中,与所述机器人数据相匹配的存储策略包括:按照数据量大小进行存储,以及按照数据产生时间进行存储。5.如权利要求1或2或3所述的机器人故障检测方法,其特征在于,所述将处理后的机器人数据进行数据存储,包括:将处理后的机器人数据按照预设存储方式存储至数据缓冲区;判断所述数据缓冲区的存储是否满足预设存储条件;若所述数据缓冲区的存储满足预设存储条件,则将所述数据缓冲区存储的机器人数据写入硬盘;若所述数据缓冲区的存储尚未满足预设存储条件,则判断所述数据缓冲区存储的机器人数据是否达到了预设存储容量;若所述数据缓冲区存储的机器人数据达到预设存储容量,则按照覆盖存储时间最久的已存储数据的存储原则,存储所述机器人数据;
若所述数据缓冲区存储的机器人数据尚未达到预设存储容量,则将需要存储的机器人数据追加至已存储的数据末尾进行数据存储。6.如权利要求1或2或3所述的机器人故障检测方法,其特征在于,所述将处理后的机器人数据进行数据存储,包括:将处理后的机器人数据存储至机器人本地;当机器人故障指令触发时,将存储在机器人本地的所述机器人数据上传至云服务器进行存储;或者:将处理后的机器人数据实时上传至云服务器进行存储;或者,将处理后的机器人数据按照预设数据量分批上传至云服务器进行存储;或者:将处理后的机器人数据全部上传至云服务器进行存储,同时存储在机器人本地的预设存储区域;且当机器人本地的所述预设存储区域的数据量达到预设数值时,按照覆盖存储时间最久的已存储数据的存储原则,存储所述机器人数据。7.如权利要求1或2或3所述的机器人故障检测方法,其特征在于,所述终端根据获取的所述机器人数据,在终端本地对出现故障的机器人进行数据回放和状态分析,包括:终端对获取的所述机器人数据进行数据处理和数据解析,并根据数据处理和数据解析结果,将存储的所述机器人数据进行数据还原;针对还原后的所述机器人数据,将所述机器人数据中对应的传感器数据和日志数据进行数据分离;利用分离后的所述传感器数据和日志数据,在终端本地模拟机器人上的传感器进行数据回放,同时,基于采集时的传感器数据频率,模拟恢复机器人对应的运动状态;根据模拟恢复的机器人的运动状态,在终端本地对机器人的故障进行分析和检测。8.一种机器人,其特征在于,所述机器人包括:通信连接的数据采集模块、数据处理模块和数据存储模块;所述数据采集模块用于:按照预设规则采集机器人产生的相关数据;所述数据处理模块用于:对所述数据采集模块采集的相关数据进行数据处理,并将处理后的机器人数据发送至数据存储模块,供所述数据存储模块对处理后的所述机器人数据进行数据存储。9.一种终端,其特征在于,所述终端包括:数据交互模块,用于接收机器人出现故障时的触发指令,请求并获取已存储的出现故障的机器人所对应的机器人数据;数据回放模块,用于根据获取的所述机器人数据,对出现故障的机器人进行数据回放和状态分析。10.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的故障检测程序,所述故障检测程序被所述处理器运行时,执行如权利要求1至7中任一项所述的机器人故障检测方法。11.一种计算机可读存储介质,其特征在于,所述存储介质上存储有故障检测程序,所述故障检测程序可以被一个或者多个处理器执行,以实现如权利要求1至7中任一项所述的机器人故障检测方法的步骤。
技术总结
本发明公开了一种机器人故障检测方法、设备及存储介质,通过机器人按照预设规则采集机器人自身产生的相关数据,并对采集的相关数据进行数据处理,将处理后的机器人数据进行数据存储;终端接收机器人出现故障时的触发指令,请求并获取已存储的出现故障的机器人所对应的机器人数据;终端根据获取的所述机器人数据,在终端本地对出现故障的机器人进行数据回放和状态分析;达到了远程获取机器人数据并进行数据回放从而实现对机器人故障检测的目的,避免了从机器人在客户现场出现问题到技术人员获取数据的漫长过程,提高了机器人的故障检测效率,节约了机器人的故障检测时间。节约了机器人的故障检测时间。节约了机器人的故障检测时间。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:炬星科技(深圳)有限公司
技术研发日:2020.12.09
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。