1.本发明是关于一种车用辅助系统,尤其是一种能够对正在执行自动停车功能的车辆的位置座标进行校正的自动驾驶辅助系统。
背景技术:
2.请参照图1,其是一种习知的全自动泊车路径确定装置9,该习知的全自动泊车路径确定装置9具有一车位模组91、一第一判断模组92、一第二判断模组93、一第三判断模组94、一路径模组95及一控制模组 96,该控制模组96通过该车位模组91确定一目标车辆的一可行驶区域与一目标车位,并执行该第一判断模组92,以判断该目标车辆是否可以基于一第一预设轨迹行驶至该目标车位,若判断结果为否,则进一步执行该第二判断模组93,以确认该目标车辆是否可以基于一第二预设轨迹行驶至该目标车位,若确认结果为否,则再进一步执行该第三判断模组 94,以评估该目标车辆是否可以基于一第三预设轨迹行驶至该目标车位,若评估结果为是,则执行该路径模组95,以将该第三预设轨迹设定为该目标车辆的泊车路径。类似于该习知的全自动泊车路径确定装置9已公布于中国专利公布号为cn111497829a的专利案当中。
3.上述习知的全自动泊车路径确定装置9,在该控制模组96依序通过该第一判断模组92、该第二判断模组93及该第三判断模组94执行泊车路径规划后,是可以通过一定位单元97侦测并更新该目标车辆运动后的位置座标,但,受限于该定位单元97精度的问题,该定位单元97所侦测到的位置座标会具有些微的误差,该些误差在随着该目标车辆沿着该泊车路径移动时持续累积增长,导致该目标车辆最终无法正确地停驶于该目标车位内。
4.因此,习知的全自动泊车路径确定装置确实仍有加以改善的必要。
技术实现要素:
5.(一)要解决的技术问题
6.为解决上述问题,本发明的目的是提供一种自动驾驶辅助系统,是能够对正在执行自动停车功能的车辆的位置座标进行校正者。
7.(二)技术方案
8.本发明的次一目的是提供一种自动驾驶辅助系统,是能够提供驾驶者远端呼叫车辆,使车辆自动驾驶至该驾驶者身旁者。
9.本发明全文所述方向性或其近似用语,例如(前)、(后)、(左)、 (右)、(上(顶))、(下(底))、(内)、(外)、(侧面)等,主要是参考附加图式的方向,各方向性或其近似用语仅用以辅助说明及理解本发明的各实施例,非用以限制本发明。
10.本发明全文所记载的元件及构件使用(一)或(一个)的量词,仅是为了方便使用且提供本发明范围的通常意义;于本发明中应被解读为包括一个或至少一个,且单一的概念也包括复数的情况,除非其明显意指其他意思。
11.本发明全文所述的(云端伺服器(cloud server)),是利用虚拟化软体建立,以将
一个实体(裸机)伺服器划分为多个虚拟伺服器,以供执行应用程式和资讯处理储存;使用者可通过线上介面远端存取该多个虚拟伺服器的功能。
12.本发明全文所述的(资料库(database)),是指将一群相关的电子资料集合并储存在硬碟、记忆体或上述的组合,且可借助资料库管理系统(dbsms)所提供的语法功能,例如新增、读取、搜寻、更新及删除等,对电子资料进行相关处理;该资料库管理系统可以借助不同资料结构方式管理电子资料,例如可以为关联式、阶层式、网状式或物件导向式等,本发明是以关联式资料库管理系统为例进行以下说明,但非用以限制本发明。
13.本发明全文所述的(耦接(coupling)),是指二装置之间可借助任何直接或间接的连接手段,以相互传递资料。举例而言,第一装置耦接第二装置,在本发明中应被解读为该第一装置可以直接连接该第二装置,例如可以借助有线实体(如:电线、排线、走线、双绞线)连接;或者该第一装置可以通过其他装置或某种连接手段而间接地连接该第二装置,例如可以借助无线媒介(如:wifi、蓝芽)或异质网路 (heterogeneous network)连接,本领域中具有通常知识者可以依据欲相连之装置的常态连接手段予以选择者。
14.本发明的自动驾驶辅助系统,包括:一个定位单元,供设置于一个车辆,该定位单元用以定位该车辆的位置,以产生一个车体座标;一个校正模组,供设置于该车辆,该校正模组用以取得该车辆与一个定位参照物之间的一个参考距离及一个参考角度;及一个处理器模组,电性连接该定位单元及该校正模组,该处理器模组接收到一个泊车讯号时,控制该定位单元及该校正模组启动并接收一个停车路径,该停车路径是由包括一个终点座标的多个轨迹座标所组成,各该轨迹座标与该定位参照物之间具有一个相对距离及一个相对角度,该处理器模组分析该车体座标是否与该终点座标相同,以确认该车辆是否位于该停车位内,若分析结果为否,则由该多个轨迹座标中取得与该车体座标最接近的一个轨迹座标,且该轨迹座标位于该车辆与该停车位之间,该处理器模组发出一个移动讯号至该车辆的一个车载电脑,使该车载电脑控制该车辆移动,直到该定位单元所侦测到的车体座标与该轨迹座标相同,该处理器模组计算该校正模组所侦测到的参考距离与参考角度,以取得一个校正参数,并计算该校正参数与该轨迹座标相对应的相对距离与相对角度所计算出的一个实际数值的差值,若该差值不等于零,则发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该差值控制该车辆进行移动补偿。
15.据此,本发明的自动驾驶辅助系统,是能够通过少数硬体设备及简单的电脑处理运算,将该停车路径细分成多个轨迹座标,并使车辆在每次移动过程只需移动至下一个轨迹座标,而且,当该定位单元所侦测取得的车体座标与该轨迹座标相同时,该处理器模组通过该校正模组取得该车辆与该定位参照物之间的参考距离与参考角度,以取得该校正参数,并计算该校正参数与该轨迹座标相对应的相对距离与相对角度所计算出的实际数值的差值,并于该差值不等于零时,使该车载电脑依据该差值控制该车辆进行移动补偿。因此,本发明的自动驾驶辅助系统,是具有简化硬体成本、降低电脑运算效能需求、通过该多个轨迹座标以引导的方式完成路径规划,以及通过该校正模组改善该定位单元的座标精度等功效。
16.其中,该多个轨迹座标中具有一个起点座标,该车辆沿着该多个轨迹座标移动前,该处理器模组是可以计算该车体座标与各该轨迹座标之间的距离,并以与该车体座标最接近的一个轨迹座标作为该起点座标,该处理器模组计算该车体座标相对于该起点座标得一
个方向角及一个距离值,并发送包括该方向角及该距离值的一个移动讯号至该车载电脑,使该车载电脑可以依据该方向角及该距离值控制该车辆移动至该起点座标。因此,是具有校正该车辆的初期位置,以使该车辆的车体座标符合该停车路径的起点座标的功效。
17.其中,该多个轨迹座标中具有一个起点座标,该处理器模组接收到一个叫车讯号时,是可以控制该定位单元及该校正模组启动,并确认该车体座标是否与该起点座标相同,以确认该车辆是否由该停车位移动至该车辆的驾驶者身旁,若确认结果为否,则可以由该多个轨迹座标中取得与该车体座标最接近的一个轨迹座标,且该轨迹座标位于该终点座标与该起点座标之间,该处理器模组是可以发出一个移动讯号至该车载电脑,使该车载电脑控制该车辆移动,直到该定位单元所侦测到的车体座标与该轨迹座标相同。因此,是具有提供驾驶者远端呼叫车辆至一预定位置的功效。
18.其中,当该停车位是位于一个室内停车场内时,该定位参照物是可以为位于该室内停车场内的柱子,且该校正模组是可以为一个超音波单元,该车辆移动至该轨迹座标时,该处理器模组是可以通过该超音波单元朝该柱子发射超音波,并接收该超音波的回音,以取得该车辆与该柱子之间的参考距离与参考角度。如此,是具有以停车场内柱子的设置位置校正该车辆的车体座标的功效。
19.其中,当该停车位是位于一个室内停车场内时,该定位参照物是可以为该室内停车场内的停车位的格线及其停车位编号,且该校正模组是可以为一个影像撷取单元,该车辆移动至该轨迹座标时,该处理器模组是可以通过该影像撷取单元朝该格线及其停车位编号拍摄,以产生一个停车位影像,该处理器模组是可以依据影像处理技术,由该停车位影像中取得该车辆与该格线之间的参考距离与参考角度。因此,是具有以停车位格线的设置位置校正该车辆的车体座标的功效。
20.本发明的自动驾驶辅助系统,还可以另包括一个动态估测模组电性连接该处理器模组,并具有一个位移量感测单元及一个横摆角感测单元,该位移量感测单元及该横摆角感测单元,分别用以侦测该车辆移动至该轨迹座标的位移量与横摆角,以取得一个当前位移变化量及一个横摆角变化量,当该车辆移动至该轨迹座标时,该处理器模组依据该当前位移变化量及该横摆角变化量计算出一个参数数值,并计算该参数数值与相对应的一个参数预设数值的差值,若该差值不等于零,则发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该轨迹座标的当前位移变化量与横摆角变化量控制该车辆进行移动补偿。因此,是能够确保该车辆沿着该多个轨迹座标移动,是具有提升停车精确性的功效。
21.本发明的自动驾驶辅助系统,还可以另包括一个路径产生模组电性连接该处理器模组,该路径产生模组是可以收集多个驾驶者将其车辆停放于该停车位时的一个原始停车路径,各该原始停车路径是通过各该车辆的定位单元侦测取得的车体座标所组成,该路径产生模组将该多个原始停车路径作为一个类神经网路模型的输入变数,以产生该停车路径,该停车路径是为该车辆移动至该停车位的过程中,使位于该车辆上的驾驶者具有最佳行车舒适度的一条行驶路径。因此,该停车路径是可以通过多个驾驶者的行驶经验相关数据不断提升与更新至最合适的路径,使该车辆沿着该停车路径朝该停车位移动的过程中,是可以避免与行驶途中的障碍物进行碰撞并具有较舒适的行车过程,是具有提升停车安全性及行车舒适度的功效。
22.其中,该类神经网路模型具有另一个输入变数,该另一个输入变数是通过振动加
速规与频谱分析仪,以取得组成该原始停车路径的任意相邻二个车体座标之间的一个振动加速度值。因此,该车辆根据该停车路径驶入该停车位的过程中,是可以降低该车辆行驶过程中所产生的振动,是具有进一步提升行车舒适度的功效。
23.本发明的自动驾驶辅助系统,还可以另包括一个路径产生模组电性连接该处理器模组,该路径产生模组通过该校正模组的侦测能力规划产生较邻近该车辆的部分轨迹座标,并使该车辆自动搜寻该停车位,以根据该车辆搜寻过程中所产生的多个轨迹座标组成该停车路径。因此,是具有自适应行走功效。
附图说明
24.图1为一种习知全自动泊车路径确定装置的系统方块图。
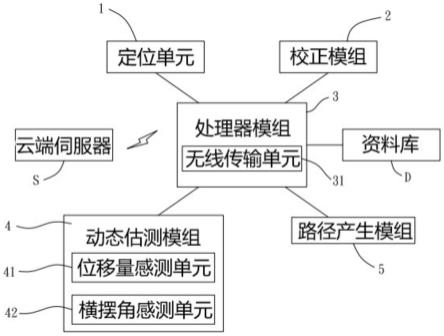
25.图2为本发明一较佳实施例的系统方块图。
26.图3为本发明一较佳实施例的使用情形图。
27.【附图标记说明】
28.1:定位单元
29.2:校正模组
30.3:处理器模组
31.31:无线传输单元
32.4:动态估测模组
33.41:位移量感测单元
34.42:横摆角感测单元
35.5:路径产生模组
36.c:车辆
37.d:资料库
38.e:终点座标
39.l:定位参照物
40.o:起点座标
41.p:停车位
42.s:云端伺服器
43.9:全自动泊车路径确定装置
44.91:车位模组
45.92:第一判断模组
46.93:第二判断模组
47.94:第三判断模组
48.95:路径模组
49.96:控制模组
50.97:定位单元
具体实施方式
51.为让本发明之上述及其他目的、特征及优点能更明显易懂,下文特举本发明之较
佳实施例,并配合所附图式,作详细说明如下:
52.请参照图2所示,其是本发明自动驾驶辅助系统的一较佳实施例,是包括一个定位单元1、一个校正模组2及一个处理器模组3,该定位单元1及该校正模组2供设置于一个车辆c,并电性连接该处理器模组3。
53.该定位单元1用以定位该车辆c的位置,以产生一个车体座标,在本实施例中,该定位单元1是可以设置于该车辆c的后轴中心,且可以为一个即时动态全球定位系统(rtk-gps)、一个全球卫星导航系统 (glonass)或一个北斗卫星导航系统(compass);又或者,该定位单元1还可以通过计算该车辆c于局部区域内的轮胎滚动位移值等定位算法,以产生该车体座标,但不以此为限。
54.该校正模组2用以取得该车辆c与一个定位参照物l之间的一个或多个参考距离及参考角度,该定位参照物l用以校正该车辆c的车体座标,该校正模组2是可以通过计算该参考距离与该参考角度,以取得该车辆c与该定位参照物l之间的一个校正参数,较佳地,该校正参数是可以为一个最短距离。在本实施例中,该校正模组2是可以包括一个超音波单元及一个影像撷取单元中的至少一个。
55.该处理器模组3电性连接该定位单元1及该校正模组2,该处理器模组3是可以采用一个树梅派(raspberry pi 3/4)作为控制平台,但不以此为限。该处理器模组3接收到一个泊车讯号时,控制该定位单元1及该校正模组2启动并接收一个停车路径,该停车路径是由包括一个起点座标o及一个终点座标e的多个轨迹座标所组成,各该轨迹座标与该定位参照物l之间具有一个相对距离及一个相对角度。具体而言,该处理器模组3是可以通过一个无线传输单元31耦接一个云端伺服器s,并由该云端伺服器s下载该停车路径及各该轨迹座标与该定位参照物l的相对距离及相对角度;或者,该停车路径及该多个相对距离与相对角度是可以预先储存于电性连接该处理器模组3的一个资料库d,以供该处理器模组3从该资料库d中取得该停车路径及该多个相对距离与相对角度。在本实施例中,是能够以物件导向程式设计(oop)的物件(object)概念描述该停车路径的多个轨迹座标,并将该多个轨迹座标储存于该云端伺服器s或该资料库d;又,该无线传输单元31可以为4g、5g、 wifi、zigbee、lora、sigfox、nb-iot或bluetooth等无线传输模组,但不以此为限。
56.该处理器模组3在开始准备控制该车辆c沿着该停车路径停驶至一个停车位p时,即该车辆c沿着该多个轨迹座标移动前,是可以先行计算该车体座标与各该轨迹座标之间的距离,并以与该车体座标最接近的一个轨迹座标作为该停车路径的起点座标o。该处理器模组3计算该车体座标相对于该起点座标o的一个方向角及一个距离值,并发送包括该方向角及该距离值的一个移动讯号至该车辆c的一个车载电脑 (electronic control unit,ecu),使该车载电脑依据该方向角及该距离值控制该车辆c移动至该起点座标o。其中,该处理器模组3与该车载电脑是可以为集中式(centralized)、分散式(distributed)或结合上述两者,该车载电脑控制该车辆移动的自动驾驶技术,是本发明所属技术领域中具有通常知识者可以理解,在此不多加赘述。
57.该处理器模组3分析该车体座标是否与该终点座标e相同,以确认该车辆c是否位于该停车位p内,若分析结果为是,则表示该车辆c已位于该停车位p内;若分析结果为否,则由该多个轨迹座标中取得与该车体座标最接近的一个轨迹座标,且该轨迹座标位于该车辆c与该停车位p之间;亦可以由该多个轨迹座标中取得与该车体座标最接近的连续至少二轨
迹座标,且该至少二轨迹座标位于该车辆c与该停车位p之间。该处理器模组3发出一个移动讯号至该车辆c的车载电脑,使该车载电脑控制该车辆c移动,直到该定位单元1所侦测到的车体座标与该轨迹座标相同。该处理器模组3计算该校正模组2所侦测到的参考距离与参考角度,以取得一个校正参数,并计算该校正参数与该轨迹座标相对应的相对距离与相对角度所计算出的一个实际数值的差值,若该差值不等于零,则该处理器模组3发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该差值控制该车辆c进行移动补偿。此外,当该车辆c 已停放在该停车位p内时,该处理器模组3即可控制该定位单元1及该校正模组2停止作动。
58.本发明自动驾驶辅助系统,还可以具有一个自动叫车功能,具体而言,该处理器模组3接收到一个叫车讯号时,控制该定位单元1及该校正模组2启动,并确认该车体座标是否与该起点座标o相同,以确认该车辆c是否由该停车位p移动至该车辆c的驾驶者身旁,若确认结果为是,则表示该车辆c已位于该驾驶者的身旁;若确认结果为否,则由该多个轨迹座标中取得与该车体座标最接近的一个轨迹座标,且该轨迹座标位于该终点座标e与该起点座标o之间。
59.该处理器模组3发出一个移动讯号至该车载电脑,使该车载电脑控制该车辆c移动,直到该定位单元1所侦测到的车体座标与该轨迹座标相同。较佳地,该处理器模组3是可以一并控制该校正模组2启动,以计算该车辆c与该定位参照物l之间的校正参数,并计算该校正参数与该轨迹座标相对应的实际数值的差值,若该差值不等于零,则该处理器模组3发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该差值控制该车辆c进行移动补偿。
60.值得一提的是,本发明自动驾驶辅助系统在执行自动叫车功能时,该车辆c的停放位置不限制一定得位于该停车位p,亦可以位于一般道路两旁等任何地方,此时,驾驶者是可以通过手机等行动装置发送一个定点座标至该云端伺服器s,该云端伺服器s依据该定点座标及该车辆c 的所在位置产生一个移动路径,并将该移动路径发送至该处理器模组 3,使该处理器模组3发送一个移动讯号至该车载电脑,使该车载电脑依据该移动路径控制该车辆c移动至驾驶者身旁。
61.本发明自动驾驶辅助系统,还可以具有一个动态估测模组4电性连接该处理器模组3,该处理器模组3是可以通过该动态估测模组4判断该车辆c移动至该轨迹座标的过程中是否产生一个误差,若判断结果为否,则不需执行额外的作动;若判断结果为是,则发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该误差控制该车辆c进行移动补偿。
62.具体而言,该动态估测模组4是可以具有一个位移量感测单元41及一个横摆角感测单元42,该位移量感测单元41用以侦测该车辆c移动至该轨迹座标的位移量,以取得一个当前位移变化量;该横摆角感测单元 42用以取得该车辆c移动至该轨迹座标的一个横摆角变化量。当该车辆 c移动至该轨迹座标时,该处理器模组3是可以依据该当前位移变化量及该横摆角变化量计算出一个参数数值,并计算该参数数值与相对应的一个参数预设数值的差值,若该差值不等于零,则发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该轨迹座标的当前位移变化量与横摆角变化量控制该车辆进行移动补偿。其中,该参数数值是供判断该车辆c移动至该轨迹座标的过程中是否与该参数预设数值产生误差,在本实施例中,该参数数值是可以为一个轮速值或一个轮胎滚动位移值。
63.本发明自动驾驶补偿系统,还可以具有一个路径产生模组5耦接该处理器模组3,
该路径产生模组5用以产生该停车路径及该移动路径。具体而言,该路径产生模组5用以产生该停车路径时,是可以收集多个驾驶者将其车辆c停放于该停车位p时的一个原始停车路径,各该原始停车路径是通过各该车辆c的定位单元1侦测取得的车体座标所组成。该路径产生模组5将该多个原始停车路径作为一个类神经网路模型的输入变数,以产生该停车路径。在本实施例中,该类神经网路模型是可以由该多个原始停车路径中学习到一个停车路径,该停车路径是为该车辆c 移动至该停车位p的过程中,使位于该车辆c上的驾驶者具有最佳行车舒适度的一条行驶路径。
64.较佳地,该类神经网路模型是可以具有另一个输入变数,该另一个输入变数是可以通过振动加速规与频谱分析仪,以取得组成该原始停车路径的任意相邻二车体座标之间的一个振动加速度值。其中,该类神经网路模型是可以单输入单输出模型或多输入单输出模型,为本发明中具有通常知识者可以理解,在此不多加赘述。
65.另外说明的是,该路径产生模组5还可以通过该校正模组2的侦测能力规划产生较邻近该车辆c的部分轨迹座标,并使该车辆c自动搜寻该停车位p,以根据该车辆c搜寻过程中所产生的多个轨迹座标组成该停车路径。
66.请一并参照第3图所示,当驾驶者欲使其车辆c自动驾驶,并停放于一个室内停车场的停车位p时,该定位参照物l是可以为位于该室内停车场内的柱子,且该校正模组2是可以为一个超音波单元。具体而言,该处理器模组3接收到一个泊车讯号时,控制该定位单元1及该校正模组2启动,并可以由该云端伺服器s或该资料库d中取得一个停车路径,使该车辆c可以沿着该停车路径移动至该室内停车场的其中一个停车位p内。该处理器模组3通过该定位单元1取得该车辆c的车体座标,并分析该车体座标是否与该终点座标e相同,以确认该车辆c是否已停放在该停车位p内,若分析结果为否,则发出一个移动讯号至该车辆c的车载电脑,使该车载电脑控制该车辆c朝与该车体座标最接近的一个轨迹座标移动,直到该定位单元1所侦测到的车体座标与该轨迹座标相同。
67.然而,受限于该定位单元1本身精度的影响,该定位单元1所侦测到的车体座标可能与实际的座标之间具有误差,因此,该车辆c移动至该轨迹座标时,该处理器模组3是可以通过该超音波单元朝该柱子发射超音波,并接收该超音波的回音,以取得该车辆c与该柱子之间的参考距离与参考角度,并据以校正该车辆c的车体座标。该处理器模组3是可以由该云端伺服器s或该资料库d中取得各该轨迹座标与该柱子之间的相对距离与相对角度,并计算该车辆c位于该轨迹座标时的校正参数与实际数值的差值,若该差值不等于零,则该处理器模组3发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该差值控制该车辆c进行移动补偿。
68.另一方面,当该校正模组2是为一个影像撷取单元时,该定位参照物l是可以为该室内停车场内的停车位的格线及其停车位编号。具体而言,该车辆c移动至该轨迹座标时,该处理器模组3是可以通过该影像撷取单元朝该格线及其停车位编号拍摄,以产生一个停车位影像。该处理器模组3依据影像处理技术,由该停车位影像中取得该车辆c与该格线之间的参考距离与参考角度,并可以由该云端伺服器s或该资料库d 中取得各该轨迹座标与该停车位编号的格线之间的相对距离与相对角度,并计算该车辆c位于该轨迹座标时的校正参数与实际数值的差值,若该差值不等于零,则该处理器模组3可以发出一个移动补偿讯号至该车载电脑,使该车载电脑依据该差值控制该车辆c进行移动补偿。
69.本发明中具有通常知识者可以理解,当该定位参照物l是为该室内停车场内的柱子,以及该停车位的格线及其停车位编号时,该校正模组 2是可以同时具有一个超音波单元及一个影像撷取单元。该处理器模组3 是可以先通过该超音波单元发射超音波,以尝试是否能够侦测到柱子的存在,若超音波单元未侦测到该柱子时,该处理器模组3是可以将该超音波单元切换成该影像撷取单元,并通过该影像撷取单元拍摄该停车位的格线及其停车位编号,以计算该车辆位于该轨迹座标时的校正参数与实际数值的差值。反之,该处理器模组3亦可以先通过该影像撷取单元尝试是否能够拍摄到该停车位的格线及其停车位编号,并于拍摄失败时,改通过该超音波单元发射超音波,以侦测取得该柱子与该车辆c之间的参考距离与参考角度。在本实施例中,该超音波单元与该影像撷取单元是可以各自独立运行、切换运行、顺续运行或同步运行,是本发明相关领域中具有通常知识者可以理解。
70.综上所述,本发明的自动驾驶辅助系统,是能够通过少数硬体设备及简单的电脑处理运算,将该停车路径细分成多个轨迹座标,并使车辆在每次移动过程只需移动至下一个轨迹座标,再且,当该定位单元所侦测取得的车体座标与该轨迹座标相同时,该处理器模组通过该校正模组取得该车辆与该定位参照物之间的参考距离与参考角度,以取得该校正参数,并计算该校正参数与该轨迹座标相对应的相对距离与相对角度所计算出的实际数值的差值,并于该差值不等于零时,使该车载电脑依据该差值控制该车辆进行移动补偿。如此,本发明的自动驾驶辅助系统,是具有简化硬体成本、降低电脑运算效能需求、通过该多个轨迹座标以引导的方式完成路径规划,以及通过该校正模组改善该定位单元的座标精度等功效。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。