1.本发明涉及了一种汽车辅助控制系统,尤其是涉及了一种基于前视觉系统的防红绿信号灯被遮挡系统。
背景技术:
2.在日常的驾驶体验中,如果驾驶员在路口附近的道路上发现前方有大型车辆,比如大货车、公交车和工程车,因为其设计高度或货物高度遮挡了红绿信号灯,使得驾驶员在跟大型车的过程中无法确切地知道绿灯变成红灯的情况,从而导致非法闯红灯的交通违规。当发现前方有大型车辆通过红绿信号灯,并且遮挡住红绿信号灯时,有经验的驾驶员往往会在看见路口停止线前采取谨慎行车,以避免在跟大型车的过程中忽略了绿灯变红灯,从而发生闯红灯的违规事件。此外这样不舒适的驾驶体验也影响了路口车辆的通行效率,使得排队过马路的车辆无法迅速通过路口。
技术实现要素:
3.为了解决背景技术中存在的问题,本发明提供了一种基于前视觉系统的防红绿信号灯被遮挡系统,有效地减少无意识的闯红灯交通违规的发生,提高了车辆的通行效率。
4.本发明主要针对在过路口时红绿信号灯被前方车辆遮挡的情况下,避免因为视线受阻而盲目跟车,从而在绿灯已经切换为红灯的情况下,不小心越过停止线而扣分。有了该防红绿信号灯被遮挡系统,可以纠正驾驶员在无意识情况下产生的越线行为。如果系统在看到红绿信号灯之前首先看到了停止线,则车辆会暂时停止,以确定当前停止线是否可以驶过。
5.本发明采用的技术方案是:
6.包括前视觉系统,安装在车辆前部并朝向车辆的前方,采集包含前方道路信息的视觉数据并发送给系统主控;
7.包括系统主控,持续实时接收来自前视觉系统的包含前方道路信息的视觉数据,判断、产生制动控制信号并发送到制动系统模块;
8.包括制动系统模块,从系统主控接收制动控制信号,根据制动控制信号自动控制车辆进行减速。
9.所述的系统主控中,根据视觉数据中的前方道路信息作出以下判断和处理:
10.首先判断视觉数据中是否有红绿信号灯可见:
11.若有红绿信号灯可见,则保持原状继续行驶;
12.若无红绿信号灯可见,则产生减速慢行控制信号发送到制动系统模块,通过制动系统模块控制车辆减速慢行,并在车辆减速慢行过程中不断持续实时接收视觉数据并从视觉数据识别搜索红绿信号灯和路口停止线,直到持续实时接收的视觉数据中识别搜索到红绿信号灯和/或路口停止线,再进行以下判断处理:
13.若搜索到路口停止线但未搜索到红绿信号灯,则产生制动控制信号发送到制动系
统模块,通过制动系统模块控制车辆在路口停止线前制动;
14.若搜索到路口停止线且搜索到红绿信号灯,则根据红绿信号灯的识别情况控制车辆通行;
15.若未搜索到路口停止线且未搜索到红绿信号灯,则继续保持行驶。
16.所述的慢行可以是按照道路限速的50%的速度行驶。
17.还包括can网络,从前视觉系统接收视觉数据并发送到系统主控。
18.所述的前视觉系统安装在车辆的挡风玻璃处。
19.所述的系统主控中,当判断到路口处但无可见红绿信号灯时,产生声音报警信号到车辆中的声音播放设备播放报警声音提醒驾驶员注意
20.所述的前视觉系统具体为摄像头。
21.当出现如图3所示的车况时,防红绿信号灯被遮挡系统依据从前视觉系统采集导入的图像判断处理,对驾驶员发出特殊的报警信号,提示驾驶员注意前方道路交通信号,并自动发出减速控制指令,以避免驾驶员因主观或客观上的因素忽视红绿信号灯一昧的跟车,导致如图5所示结果。当跟车距离过小时,驾驶员可能会越过停止线才能看到红绿信号灯,而此时若为红灯,则已违反了交通法规,危害交通安全。
22.本系统在路口无法观察到红绿信号灯时由系统主控发出制动控制指令,制动系统模块根据指令自动控制车速到低于前方车辆,以此拉开跟车距离,转为如图4场景。当车辆间距离拉大后,上方的视野逐渐变开阔,便更好的观察到红绿信号灯情况,做出正确的判断。若路口停止线先于红绿信号灯被观察到,则自动控制车速使其在停止线前驻车直到红绿信号灯清晰可见。
23.本发明的有益效果是:
24.本发明能够在因外界因素导致的无法观察到红绿信号灯条件下,通过自动控制车速并提醒驾驶人员的方式来保证不会犯下闯红灯等交通事故。
25.本发明可以有效的帮助驾驶员避免许多路口处视野盲区导致的交通事故,提高公共道路上行车的安全性。
附图说明
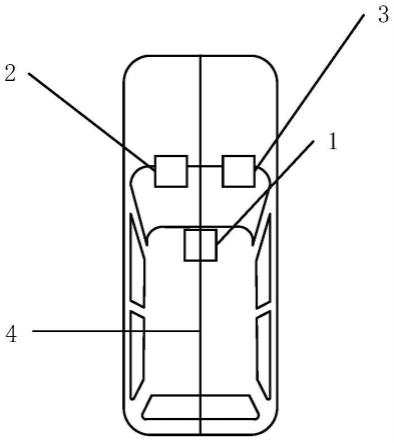
26.图1为本发明系统的系统框图俯视图;
27.图中:1、前视觉系统,2、系统主控,3、制动系统模块,4、can网络。
28.图2为防红绿信号灯被遮挡系统的系统流程图;
29.图3为红绿信号灯被前方车辆遮挡时、本车跟大车时无法观察到红绿信号灯的场境图;
30.图中:车a为本车,车b为跟随的大车,车c、车d为其他的交通参与车辆,虚线为路口停止线。
31.图4为描述与大车的车距较大时,能够在停止线前观察到红绿信号灯的场景图。
32.图中:车a为本车,车b为跟随的大车,车c、车d为其他的交通参与车辆,虚线为路口停止线。
33.图5为描述与大车的车距过小时,无法在停止线前观察到红绿信号灯的场景图。
34.图中:车a为本车,车b为跟随的大车,车c、车d为其他的交通参与车辆,虚线为路口
停止线。
具体实施方式
35.下面结合附图及具体实施例对本发明作进一步详细说明。
36.如图1所示,系统包括:
37.包括前视觉系统1,安装在车辆前部并朝向车辆的前方,采集包含前方道路信息的视觉数据并发送给系统主控2;
38.前方道路信息包含了红绿信号灯信息、前方道路车辆状况、路口停止线信息。具体地防红绿信号灯被遮挡系统通过安装在车前挡风玻璃上的摄像头获取红绿信号灯、停止线距离、前方车辆间距等图像信息。
39.包括系统主控2,通过can网络4持续实时接收来自前视觉系统1的包含前方道路信息的视觉数据,判断、产生制动控制信号并发送到制动系统模块3;
40.包括制动系统模块3,从系统主控2接收制动控制信号,根据制动控制信号自动控制本车车辆进行减速。
41.如图2所示,系统主控2中,根据视觉数据中的前方道路信息作出以下判断和处理:
42.首先判断视觉数据中是否有红绿信号灯可见:
43.若有红绿信号灯可见,则保持原状,控制本车继续行驶;
44.若无红绿信号灯可见,则产生减速慢行控制信号发送到制动系统模块3,通过制动系统模块3控制车辆减速慢行,并在车辆减速慢行过程中不断持续实时接收视觉数据并从视觉数据识别搜索红绿信号灯和路口停止线,直到持续实时接收的视觉数据中识别搜索到红绿信号灯和路口停止线,再进行以下判断处理:
45.若搜索到路口停止线但未搜索到红绿信号灯,则产生制动控制信号发送到制动系统模块3,通过制动系统模块3控制车辆在路口停止线前制动;
46.若搜索到路口停止线且搜索到红绿信号灯,则根据红绿信号灯的识别情况控制车辆通行;
47.若未搜索到路口停止线且未搜索到红绿信号灯,则继续保持行驶。
48.还包括can网络4,从前视觉系统1接收视觉数据并发送到系统主控2。
49.前视觉系统1安装在车辆的挡风玻璃处,前视觉系统1具体为摄像头。
50.系统主控2中,当判断到路口处但无可见红绿信号灯时,产生声音报警信号到车辆中的声音播放设备播放特殊的报警声音提醒驾驶员注意。
51.防红绿信号灯被遮挡系统通过安装在车前挡风玻璃上的摄像头获取包含红绿信号灯、停止线距离、前方车辆间距等信息的图像,进一步通过图像分析处理获得红绿信号灯状态、本车到路口停止线距离、本车到前方车辆的间距等信息。
52.当到达路口时,安装在车挡风玻璃上的前视觉系统1获取到红绿信号灯、车辆、停止线等图像信息,并持续的通过can网络4上传至车辆的系统主控2。
53.系统主控2依据图像中的信息处理作出控制的措施。
54.如果前方跟随的车辆是大型货车,其高度导致了本车的前视觉系统无法有效的识别到红绿信号灯,则发送制动控制指令给制动系统模块3,自动控制车辆减速低于前车车速,以此拉开车间距以便能观察到红绿信号灯信息,避免驾驶员一昧跟车无法有效的调整
观察角度;
55.如果停止线先于红绿信号灯被发现,则车辆系统主控2发送新的制动控制指令给制动控制模块3,确保车辆能够在停止线之前刹停,避免因视野受限而导致的误闯红灯现象;在系统主控观察到红绿信号灯后,提示驾驶员接管车辆制动系统并解除强制控制指令。
56.当出现如图3所示的车况时,防红绿信号灯被遮挡系统依据从前视觉系统采集导入的图像判断处理,对驾驶员发出特殊的报警信号,提示驾驶员注意前方道路交通信号,并自动发出减速控制指令,以避免驾驶员因主观或客观上的因素忽视红绿信号灯一昧的跟车,导致如图5所示结果。当跟车距离过小时,驾驶员可能会越过停止线才能看到红绿信号灯,而此时若为红灯,则已违反了交通法规,危害交通安全。
57.本系统在路口无法观察到红绿信号灯时由系统主控发出制动控制指令,制动系统模块根据指令自动控制车速到低于前方车辆,以此拉开跟车距离,转为如图4场景。当车辆间距离拉大后,上方的视野逐渐变开阔,便更好的观察到红绿信号灯情况,做出正确的判断。若路口停止线先于红绿信号灯被观察到,则自动控制车速使其在停止线前驻车直到红绿信号灯清晰可见。
58.由此实施可见,本发明能够解决针对跟车大型车辆时路口处的红绿信号灯被遮挡导致无法准确判断是否能够安全通行的问题,采用车辆自动控制的措施避免了由于视野受限而导致的违规、安全事故。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。