1.本发明涉及一种工程领域,更具体的说是一种智能化扫雪机器人。
背景技术:
2.智能化扫雪机器人是一种常见的工程机械,例如专利号为cn215801349u的一种便于更换扫雪片的扫雪机,该机构包括扫雪机本体,所述扫雪机本体的两侧均安装有传动臂,所述传动臂的侧面安装有升降组件,所述传动臂之间连接有滚动圆柱,所述滚动圆柱的表面设置有若干扫雪片,所述扫雪片的内部安装有固定组件,本实用新型通过设置固定组件使限位块与通槽相卡接,使插杆与扫雪板内部的卡槽相卡接,进而对扫雪板进行双重固定限位,通过此种插槽式卡接固定方式使对扫雪板的更换更加迅速便捷,但是该装置不能在铲雪的同时向地面撒下融雪盐起到融雪的效果,且功能比较单一。
技术实现要素:
3.本发明的目的是提供一种智能化扫雪机器人,可以在铲雪的同时向地面撒下融雪盐起到融雪的效果;可以改变盐槽下端漏口的大小,进而改变漏盐的量,根据不同路面改变融雪的效果。
4.本发明的目的通过以下技术方案来实现:
5.一种智能化扫雪机器人,包括铲雪装置、储雪装置、撒盐装置,所述铲雪装置与储雪装置相连接,储雪装置与撒盐装置相连接。
6.作为本技术方案的进一步优化,本发明一种智能化扫雪机器人,所述铲雪装置包括铲雪斗、包边铁、兜雪板、电机一、转轮一、小圆柱一、连接杆一、连接杆二、铲雪板、支架一、支架二、轮子一、连接杆三、转轴一,铲雪斗与包边铁固定连接,铲雪斗与兜雪板固定连接,电机一与转轮一固定连接,转轮一与小圆柱一固定连接,两个连接杆一均与铲雪斗转动连接,连接杆一与连接杆二铰接连接,小圆柱一与连接杆二转动连接,连接杆二与铲雪板固定连接,两个支架一均与铲雪斗固定连接,铲雪斗与支架二固定连接,支架二与轮子一转动连接,两个连接杆三均与铲雪斗固定连接,铲雪斗与转轴一转动连接。
7.作为本技术方案的进一步优化,本发明一种智能化扫雪机器人,所述储雪装置包括传送带、限位板、支架三、连接杆四、平板凸台一、储雪箱、滑道、轮子二、连接杆五、支架四、分雪装置、电机二、推板、连接杆六、连接杆七、照明灯、挡板、电机三、支架五、转轴二,传送带与限位板滑动连接,四个支架三均与限位板固定连接,平板凸台一与储雪箱固定连接,两个连接杆四均与平板凸台一固定连接,四个支架三均与储雪箱固定连接,平板凸台一与滑道固定连接,两个轮子二均与连接杆五固定连接,两个支架四均与连接杆五转动连接,两个支架四均与平板凸台一固定连接,储雪箱与分雪装置固定连接,电机二与推板固定连接,连接杆六与连接杆七滑动连接,连接杆七与照明灯铰接连接,两个连接杆六均与储雪箱固定连接,储雪箱与挡板滑动连接,、电机三与支架五固定连接,两个支架五均与储雪箱固定连接,电机三与转轴二固定连接,传送带与转轴二配合连接,传送带与转轴一配合连接,两
个支架一均与限位板固定连接,连接杆三与连接杆四铰接连接。
8.作为本技术方案的进一步优化,本发明一种智能化扫雪机器人,所述撒盐装置包括平板凸台二、电机四、转轮二、皮带一、转轮三、连接杆八、轮子三、履带、支架六、轮子四、轮子五、皮带二、转轮四、盐槽、六叶轮、转杆十、软质滑板,平板凸台二与电机四固定连接,电机四与转轮二固定连接,转轮二与皮带一配合连接,皮带一与转轮三配合连接,转轮三与连接杆八固定连接,两个轮子三均与连接杆八固定连接,轮子三与履带配合连接,连接杆八与支架六转动连接,两个轮子四均与履带配合连接,两个轮子五均与履带配合连接,转轮三与皮带二配合连接,皮带二与转轮四配合连接,两个盐槽均与平板凸台二固定连接,两个六叶轮均与转轮四固定连接,转杆十与软质滑板固定连接,两个软质滑板均与盐槽滑动连接。
9.本发明一种智能化扫雪机器人的有益效果为:
10.本发明一种智能化扫雪机器人,启动电机四带动转轮二转动,带动皮带一转动,带动转轮三转动,带动连接杆八转动,带动两个轮子三转动,带动履带转动,带动两组轮子四转动,带动两组轮子五转动,带动平板凸台二向前运动,储雪装置向前运动,带动两个轮子二转动,带动两个轮子一转动,带动整体装置向前运动,转轮三转动带动皮带二转动,带动转轮四转动,带动两个六叶轮转动,进而将盐槽内的融雪盐从盐槽下端漏下,漏在地面起到融雪的效果,拉动转杆十可带动软质滑板在盐槽内滑动,进而改变了两个盐槽下端漏口的大小,进而改变了漏盐的量。
附图说明
11.下面结合附图和具体实施方法对本发明做进一步详细的说明。
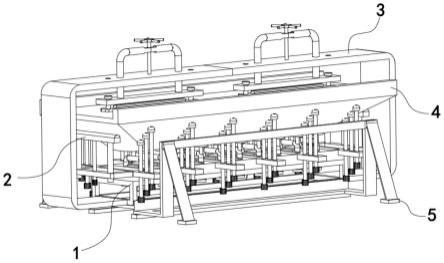
12.图1是本发明的整体结构示意图;
13.图2是本发明的铲雪装置结构示意图一;
14.图3是本发明的铲雪装置结构示意图二;
15.图4是本发明的铲雪装置结构示意图三;
16.图5是本发明的储雪装置结构示意图一;
17.图6是本发明的储雪装置结构示意图二;
18.图7是本发明的储雪装置结构示意图三;
19.图8是本发明的撒盐装置结构示意图一;
20.图9是本发明的撒盐装置结构示意图二;
21.图10是本发明的撒盐装置结构示意图三;
22.图11是本发明的撒盐装置结构示意图四。
23.图中:1、铲雪装置;101、铲雪斗;102、包边铁;103、兜雪板;104、电机一;105、转轮一;106、小圆柱一;107、连接杆一;108、连接杆二;109、铲雪板;110、支架一;111、支架二;112、轮子一;113、连接杆三;114、转轴一;2、储雪装置;201、传送带;202、限位板;203、支架三;204、连接杆四;205、平板凸台一;206、储雪箱;207、滑道;208、轮子二;209、连接杆五;210、支架四;211、分雪装置;212、电机二;213、推板;214、连接杆六;215、连接杆七;216、照明灯;217、挡板;218、电机三;219、支架五;220、转轴二;3、撒盐装置;301、平板凸台二;302、电机四;303、转轮二;304、皮带一;305、转轮三;306、连接杆八;307、轮子三;308、履带;309、支架六;310、轮子四;311、轮子五;312、皮带二;313、转轮四;314、盐槽;315、六叶轮;316、转
杆十;317、软质滑板。
具体实施方式
24.下面结合附图对本发明作进一步详细说明。
25.本装置中所述的固定连接是指通过焊接、螺纹固定等方式进行固定,结合不同的使用环境,使用不同的固定方式;所述的转动连接是指通过将轴承烘装在轴上,轴或轴孔上设置有弹簧挡圈槽,通过将弹性挡圈卡在挡圈槽内实现轴承的轴向固定,实现转动;所述的滑动连接是指通过滑块在滑槽或导轨内的滑动进行连接;所述的铰接是指通过在铰链、销轴和短轴等连接零件上进行活动的连接方式;所需密封处均是通过密封圈或o形圈实现密封。
26.具体实施方式一:
27.下面结合图1-11说明本实施方式,一种智能化扫雪机器人,包括铲雪装置1、储雪装置2、撒盐装置3,所述铲雪装置1与储雪装置2相连接,储雪装置2与撒盐装置3相连接。
28.具体实施方式二:
29.下面结合图1-11说明本实施方式,本实施方式对实施方式一作进一步说明,所述的铲雪装置1包括铲雪斗101、包边铁102、兜雪板103、电机一104、转轮一105、小圆柱一106、连接杆一107、连接杆二108、铲雪板109、支架一110、支架二111、轮子一112、连接杆三113、转轴一114,铲雪斗101与包边铁102固定连接,铲雪斗101与兜雪板103固定连接,电机一104与转轮一105固定连接,转轮一105与小圆柱一106固定连接,两个连接杆一107均与铲雪斗101转动连接,连接杆一107与连接杆二108铰接连接,小圆柱一106与连接杆二108转动连接,连接杆二108与铲雪板109固定连接,两个支架一110均与铲雪斗101固定连接,铲雪斗101与支架二111固定连接,支架二111与轮子一112转动连接,两个连接杆三113均与铲雪斗101固定连接,铲雪斗101与转轴一114转动连接;
30.装置向前运动时,两个兜雪板103将路上的雪兜到路中间,并通过包边铁102铲到铲雪斗101上,启动电机一104带动转轮一105转动,带动小圆柱一106转动,带动连接杆一107和连接杆二108运动,带动铲雪板109运动,进而将铲雪斗101上的雪铲到铲雪斗101中间。
31.具体实施方式三:
32.下面结合图1-11说明本实施方式,本实施方式对实施方式一作进一步说明,所述的储雪装置2包括传送带201、限位板202、支架三203、连接杆四204、平板凸台一205、储雪箱206、滑道207、轮子二208、连接杆五209、支架四210、分雪装置211、电机二212、推板213、连接杆六214、连接杆七215、照明灯216、挡板217、电机三218、支架五219、转轴二220,传送带201与限位板202滑动连接,四个支架三203均与限位板202固定连接,平板凸台一205与储雪箱206固定连接,两个连接杆四204均与平板凸台一205固定连接,四个支架三203均与储雪箱206固定连接,平板凸台一205与滑道207固定连接,两个轮子二208均与连接杆五209固定连接,两个支架四210均与连接杆五209转动连接,两个支架四210均与平板凸台一205固定连接,储雪箱206与分雪装置211固定连接,电机二212与推板213固定连接,连接杆六214与连接杆七215滑动连接,连接杆七215与照明灯216铰接连接,两个连接杆六214均与储雪箱206固定连接,储雪箱206与挡板217滑动连接,、电机三218与支架五219固定连接,两个支架
五219均与储雪箱206固定连接,电机三218与转轴二220固定连接,传送带201与转轴二220配合连接,传送带201与转轴一114配合连接,两个支架一110均与限位板202固定连接,连接杆三113与连接杆四204铰接连接;
33.启动电机三218带动转轴二220转动,带动传送带201运动,进而将铲雪斗101内的雪向上传送,将雪传送到储雪箱206内,限位板202起到支撑传送带201作用,避免传送带201坍塌,两个照明灯216起到照明作用,转动照明灯216改变照明的角度,拉动连接杆七215带动照明灯216向前运动,进而改变了两个照明灯216探照的距离,分雪装置211将雪分散到储雪箱206内的四边,避免雪堆积到储雪箱206中间,当储雪箱206内的雪装满,装置运动到合适的位置,向上拉出挡板217,启动电机二212带动推板213向前推动,将储雪箱206内的雪从滑道207推出。
34.具体实施方式四:
35.下面结合图1-11说明本实施方式,本实施方式对实施方式一作进一步说明,所述的撒盐装置3包括平板凸台二301、电机四302、转轮二303、皮带一304、转轮三305、连接杆八306、轮子三307、履带308、支架六309、轮子四310、轮子五311、皮带二312、转轮四313、盐槽314、六叶轮315、转杆十316、软质滑板317,平板凸台二301与电机四302固定连接,电机四302与转轮二303固定连接,转轮二303与皮带一304配合连接,皮带一304与转轮三305配合连接,转轮三305与连接杆八306固定连接,两个轮子三307均与连接杆八306固定连接,轮子三307与履带308配合连接,连接杆八306与支架六309转动连接,两个轮子四310均与履带308配合连接,两个轮子五311均与履带308配合连接,转轮三305与皮带二312配合连接,皮带二312与转轮四313配合连接,两个盐槽314均与平板凸台二301固定连接,两个六叶轮315均与转轮四313固定连接,转杆十316与软质滑板317固定连接,两个软质滑板317均与盐槽314滑动连接;
36.将融雪盐放入盐槽314内,启动电机四302带动转轮二303转动,带动皮带一304转动,带动转轮三305转动,带动连接杆八306转动,带动两个轮子三307转动,带动履带308转动,带动两组轮子四310转动,带动两组轮子五311转动,带动平板凸台二301向前运动,储雪装置2向前运动,带动两个轮子二208转动,带动两个轮子一112转动,带动整体装置向前运动,转轮三305转动带动皮带二312转动,带动转轮四313转动,带动两个六叶轮315转动,进而将盐槽314内的融雪盐从盐槽314下端漏下,漏在地面起到融雪的效果,拉动转杆十316可带动软质滑板317在盐槽314内滑动,进而改变了两个盐槽314下端漏口的大小,进而改变了漏盐的量。
37.本发明的一种智能化扫雪机器人,其工作原理为:装置向前运动时,两个兜雪板103将路上的雪兜到路中间,并通过包边铁102铲到铲雪斗101上,启动电机一104带动转轮一105转动,带动小圆柱一106转动,带动连接杆一107和连接杆二108运动,带动铲雪板109运动,进而将铲雪斗101上的雪铲到铲雪斗101中间;启动电机三218带动转轴二220转动,带动传送带201运动,进而将铲雪斗101内的雪向上传送,将雪传送到储雪箱206内,限位板202起到支撑传送带201作用,避免传送带201坍塌,两个照明灯216起到照明作用,转动照明灯216改变照明的角度,拉动连接杆七215带动照明灯216向前运动,进而改变了两个照明灯216探照的距离,分雪装置211将雪分散到储雪箱206内的四边,避免雪堆积到储雪箱206中间,当储雪箱206内的雪装满,装置运动到合适的位置,向上拉出挡板217,启动电机二212带
动推板213向前推动,将储雪箱206内的雪从滑道207推出;将融雪盐放入盐槽314内,启动电机四302带动转轮二303转动,带动皮带一304转动,带动转轮三305转动,带动连接杆八306转动,带动两个轮子三307转动,带动履带308转动,带动两组轮子四310转动,带动两组轮子五311转动,带动平板凸台二301向前运动,储雪装置2向前运动,带动两个轮子二208转动,带动两个轮子一112转动,带动整体装置向前运动,转轮三305转动带动皮带二312转动,带动转轮四313转动,带动两个六叶轮315转动,进而将盐槽314内的融雪盐从盐槽314下端漏下,漏在地面起到融雪的效果,拉动转杆十316可带动软质滑板317在盐槽314内滑动,进而改变了两个盐槽314下端漏口的大小,进而改变了漏盐的量。
38.当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。