1.本发明涉及搜救设备、救援机器人、软体机器人技术领域,更具体的说是涉及一种面向废墟搜救的维生软连续体机器人。
背景技术:
2.救援机器人是一种执行特种任务的机器人,救援机器人的问世大大提高了灾后救援的成功几率。
3.现有的救援机器人可以分成两类,一类是挖掘与破障机器人,一类是探测与定位机器人。由于挖掘与破障机器人体型较大,且多为刚性元器件组成,对于一些狭小环境束手无策,被困者受困于容易二次塌方的复杂密闭环境,该种救援机器人的局限性将被放大,挖掘与破障机器人的使用对于环境有着严苛的要求,因此现有多采用人工操作小型破拆设备进行挖掘。探测与定位机器人主要针对灾后环境进行生命体征的探测与生命体的定位,对于被困较长时间的伤者,并不能有显著的帮助。
4.因此,设计一种适应复杂狭小环境的,能够向长时间被困人员提供生存所需基础条件的救援机器人,是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种面向废墟搜救的维生软连续体机器人,旨在解决上述技术问题。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种面向废墟搜救的维生软连续体机器人,包括:
8.软连续体模块;所述软连续体模块包括尼龙波纹外管,和套装在所述尼龙波纹外管内部的内软管;所述内软管由内侧管体和外侧管体间隔套装形成双层管体结构;所述内侧管体形成安装腔,所述外侧管体和所述内侧管体之间通过多个轴向布置的分隔软条连接,并形成环绕所述内侧管体布置的多个气动控制腔,所述气动控制腔的两端封闭;所述安装腔内侧壁贴合套设有支撑压簧;所述安装腔内部集成布置有纤维囊管和功能管线,所述纤维囊管内部填充有尼龙丝;每个所述气动控制腔均连接有驱动气管,所述驱动气管位于所述外侧管体和所述尼龙波纹外管之间;所述驱动气管和所述纤维囊管分别与气动机构连接;
9.齿轮进给机构;所述齿轮进给机构通过齿轮与所述尼龙波纹外管的外侧波纹啮合,并通过齿轮转动实现对所述尼龙波纹外管的位移驱动;
10.工作头;所述工作头固定在所述尼龙波纹外管的一端,且与所述内软管的端头固定,所述工作头上集成安装有与所述功能管线对应的功能件。
11.通过上述技术方案,本发明基于软体机器人的固有柔顺特性,利用被动顺应与主动变形结合的运动方式,在齿轮进给机构的驱动下,软连续体模块能够快速穿越障碍抵达被困人员附近;在运动过程中通过中心集成的纤维囊管,利用纤维干扰的方式改变自身刚
度,提高软连续体机器人的通过性,通过对气动控制腔的充气抽气控制实现头部方向的调整改变,通过头部集成的功能件,能够在一定时间内维持被困者所需的生存条件,延长救援时间,提高灾后救援成功率。
12.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述功能管线包括液体管、气体管和电线线缆;所述液体管和所述气体管的一端均延伸至所述安装腔外部,并分别连接有水泵和氧气泵,另一端均固定在所述工作头的端面上,其端头安装有硅胶防尘膜;所述电线线缆一端延伸至所述安装腔外部,并与电控系统电性连接,另一端与对应的所述功能件电性连接。当软体机器人搜寻到被困人员时,软连续体机械臂能够通过集成的气体管释放出氧气,能够有效提高狭小环境的氧气浓度,同时还可以借助液体管向被困人员输送饮用水、营养液等维生物质。
13.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述功能件包括与所述电线线缆电性连接的麦克风、摄像头、扬声器、led灯和气体传感器,能够实时反馈废墟环境内的实时地形环境信息,气体传感器能够监测废墟内的空气质量、含氧浓度等,方便救援人员对救援方案进行调整。
14.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述工作头包括钩爪部和头部外壳;所述钩爪部包括固定在所述尼龙波纹外管和所述内软管端头的双层管,所述双层管的内管用于所述功能管线通过,所述双层管的外管均匀开设有多个镂空凹槽;所述双层管的内管上滑动连接有驱动环,所述双层管的内管远离所述尼龙波纹外管的一端与所述镂空凹槽的对应处均铰接有支撑杆,所述驱动环上铰接有与所述支撑杆数量相同的连杆,所述连杆远离所述驱动环的一端与所述支撑杆的中部铰接;所述驱动环通过折叠伸缩机构带动在所述双层管的内管上往复滑动,所述折叠伸缩机构与所述气动机构通过布置在所述尼龙波纹外管和所述外侧管体之间的管线连接;所述头部外壳固定在所述双层管远离所述尼龙波纹外管的一端,穿过所述双层管的内管的所述功能管线进入所述头部外壳内部,所述液体管和所述气体管的端头露出在所述头部外壳的端面上;所述麦克风、所述摄像头、所述扬声器、所述led灯和所述气体传感器集成固定在所述头部外壳上。钩爪部能够在折叠伸缩机构的驱动下实现支撑杆的伸出和收回,在特定位置起到支撑的作用;头部外壳能够对内部管线起到保护作用。
15.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述头部外壳为环氧树脂材料制成的透明壳体。头部外壳为子弹头形状,更有利于克服前进的障碍,便于通过狭窄通道。
16.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述电控系统包括pc终端和对讲机。pc终端为笔记本电脑,能够对摄像头和气体传感器进行数据采集,同时能够对led灯进行控制,并通过对讲机进行对话。
17.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述镂空凹槽的数量为3个。3个镂空凹槽即配合三套支撑杆结构,能够满足支撑需求。
18.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述气动控制腔的数量为3个。向气动控制腔内通入不同气压的压缩气体,可以实现不同方向的弯曲、偏转与伸长。
19.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,所述齿轮进给机构
包括箱体,以及转动连接在所述箱体上的两个齿轮,两个所述齿轮对应布置在所述尼龙波纹外管的上下两侧,且与其外侧波纹啮合;所述箱体上安装有用于驱动一个所述齿轮转动的驱动电机。进给箱的齿轮啮合,控制进给速度、方向与力的大小,能够使机器人的运动控制更加准确。
20.优选的,在上述一种面向废墟搜救的维生软连续体机器人中,还包括卷线收集架,所述卷线收集架位于所述齿轮进给机构远离所述工作头的一侧,且用于缠绕所述尼龙波纹外管。便于使用后的收卷收纳。
21.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种面向废墟搜救的维生软连续体机器人,具有以下有益效果:
22.1、本发明针对现有的深埋救援过程中,现有救援机器人在复杂狭小环境难以施展的问题,提出了一种面向废墟搜救的维生软连续体机器人,利用软连续体机器人的柔顺性与灵活性,能够适应复杂狭小环境,快速抵达被困人员附近。
23.2、本发明针对现有的深埋救援过程中,人工救援速度慢,被困人员生还率随救援时间不断降低的问题,在软体机器人末端的头部集成了气液导管、气体传感器等功能部件,通过气液导管提供氧气、水、营养液等维持生命的物质。
24.3、本发明通过纤维干扰的方式,在软体部分插入柔性纤维材料,通过负压变刚度解决现有超长软连续体机器人的变刚度问题,提升软连续体机器人的越障能力,保证长距离运动的准确性和可控性。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
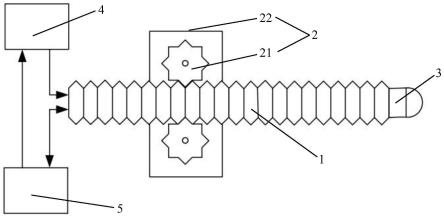
26.图1附图为本发明提供的面向废墟搜救的维生软连续体机器人的结构示意图;
27.图2附图为本发明提供的软连续体模块和工作头的外部结构示意图;
28.图3附图为本发明提供的软连续体模块的内部结构示意图;
29.图4附图为本发明提供的内软管的结构示意图;
30.图5附图为本发明提供的图4中a-a的剖面图;
31.图6附图为本发明提供的维生软连续体机器人通过普通直道的示意图;
32.图7附图为本发明提供的维生软连续体机器人被动运动通过弯道的示意图;
33.图8附图为本发明提供的维生软连续体机器人被动运动无法通过弯道的示意图;
34.图9附图为本发明提供的维生软连续体机器人在图8基础上主动变形的示意图;
35.图10附图为本发明提供的维生软连续体机器人在图9基础上顺利通过障碍的示意图;
36.图11附图为本发明提供的维生软连续体机器人未变刚度无法移动障碍物的示意图;
37.图12附图为本发明提供的维生软连续体机器人变刚度后成功移动障碍物的示意图;
38.图13附图为本发明提供的维生软连续体机器人未变刚度下难以保持直线运动的示意图;
39.图14附图为本发明提供的维生软连续体机器人变刚度下保持直线运动的示意图;
40.图15附图为本发明提供的维生软连续体机器人功能实现的示意图。
41.其中:
42.1-软连续体模块;
43.11-尼龙波纹外管;12-内软管;121-内侧管体;122-外侧管体;123-安装腔;124-分隔软条;125-气动控制腔;13-支撑压簧;14-纤维囊管;
44.15-功能管线;151-液体管;152-气体管;153-电线线缆;16-驱动气管;
45.2-齿轮进给机构;
46.21-齿轮;22-箱体;
47.3-工作头;
48.31-功能件;32-钩爪部;321-双层管;3211-镂空凹槽;322-驱动环;323-支撑杆;324-连杆;33-头部外壳;
49.4-气动机构;
50.5-电控系统。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.参见附图1至附图5,本发明实施例公开了一种面向废墟搜救的维生软连续体机器人,包括:
53.软连续体模块1;软连续体模块1包括尼龙波纹外管11,和套装在尼龙波纹外管11内部的内软管12;内软管12由内侧管体121和外侧管体122间隔套装形成双层管体结构;内侧管体121形成安装腔123,外侧管体122和内侧管体121之间通过多个轴向布置的分隔软条124连接,并形成环绕内侧管体121布置的多个气动控制腔125,气动控制腔125的两端封闭;安装腔123内侧壁贴合套设有支撑压簧13;安装腔123内部集成布置有纤维囊管14和功能管线15,纤维囊管14内部填充有尼龙丝;每个气动控制腔125均连接有驱动气管16,驱动气管16位于外侧管体122和尼龙波纹外管11之间;驱动气管16和纤维囊管14分别与气动机构4连接;
54.齿轮进给机构2;齿轮进给机构2通过齿轮21与尼龙波纹外管11的外侧波纹啮合,并通过齿轮21转动实现对尼龙波纹外管11的位移驱动;
55.工作头3;工作头3固定在尼龙波纹外管11的一端,且与内软管12的端头固定,工作头3上集成安装有与功能管线15对应的功能件31。
56.为了进一步优化上述技术方案,功能管线15包括液体管151、气体管152和电线线缆153;液体管151和气体管152的一端均延伸至安装腔123外部,并分别连接有水泵和氧气泵,另一端均固定在工作头3的端面上,其端头安装有硅胶防尘膜;电线线缆153一端延伸至
安装腔123外部,并与电控系统5电性连接,另一端与对应的功能件31电性连接。
57.为了进一步优化上述技术方案,功能件31包括与电线线缆153电性连接的麦克风、摄像头、扬声器、led灯和气体传感器。
58.为了进一步优化上述技术方案,工作头3包括钩爪部32和头部外壳33;钩爪部32包括固定在尼龙波纹外管11和内软管12端头的双层管321,双层管321的内管用于功能管线15通过,双层管321的外管均匀开设有多个镂空凹槽3211;双层管321的内管上滑动连接有驱动环322,双层管321的内管远离尼龙波纹外管11的一端与镂空凹槽3211的对应处均铰接有支撑杆323,驱动环322上铰接有与支撑杆323数量相同的连杆324,连杆324远离驱动环322的一端与支撑杆323的中部铰接;驱动环322通过折叠伸缩机构带动在双层管321的内管上往复滑动,折叠伸缩机构与气动机构4通过布置在尼龙波纹外管11和外侧管体122之间的管线连接;头部外壳33固定在双层管321远离尼龙波纹外管11的一端,穿过双层管321的内管的功能管线15进入头部外壳33内部,液体管151和气体管152的端头露出在头部外壳33的端面上;麦克风、摄像头、扬声器、led灯和气体传感器集成固定在头部外壳33上。
59.本实施例提供的维生软连续体机器人区别于现有挖掘救援方式,其通过灵活的连续体机构,能够在一小时内穿越复杂狭窄的非结构化未知环境,末端的头部可以抵达被困人员身边取得联系,并提供维生所需的新鲜空气以及营养物质等。
60.机器人中心的安装腔123内的纤维囊管14基于纤维干扰变刚度技术,其中的尼龙纤维\光纤等柔性纤维在负压环境下将出现阻塞现象可以实现软连续体机器人的刚度变化;机器人通过增大刚度增加连续体机器人的末端力,能够清除行进路线中的小障碍物,从而避免转向与绕行增加运动控制的难度,同时还可以解决在软体机械臂过长时刚度低所导致的低进给力问题,延长软体机器人的工作空间,增强机器人的通过性。
61.为了进一步优化上述技术方案,头部外壳33为环氧树脂材料制成的透明壳体。
62.为了进一步优化上述技术方案,电控系统5包括pc终端和对讲机。
63.为了进一步优化上述技术方案,镂空凹槽3211的数量为3个。
64.为了进一步优化上述技术方案,气动控制腔125的数量为3个。
65.为了进一步优化上述技术方案,齿轮进给机构2包括箱体22,以及转动连接在箱体22上的两个齿轮21,两个齿轮21对应布置在尼龙波纹外管11的上下两侧,且与其外侧波纹啮合;箱体22上安装有用于驱动一个齿轮21转动的驱动电机。
66.为了进一步优化上述技术方案,还包括卷线收集架,卷线收集架位于齿轮进给机构2远离工作头3的一侧,且用于缠绕尼龙波纹外管11。
67.本实施例的工作原理和控制方法为:
68.该种搜救维生软连续体机器人基于硅胶制成的软连续体机器人通过在其上集成功能模块,利用软体机器人柔顺特性进行运动,适合用于建筑物倒塌形成的深埋废墟救援。
69.在重力和进给力驱动下,机器人顺着建筑坍塌物形成的间隙,向被困目标附近行进。利用机器人的柔顺特性,当机器人轴线与障碍表面夹角在[-50
°
,50
°
]范围时,在进给力与障碍反弹力作用下,机器人顺应通过障碍;当超出范围时,机器人末端模块主动产生变形,适应障碍物,在进给力作用下通过障碍。
[0070]
如图6所示,机器人在普通直道中在进给力驱动下即可前进。
[0071]
如图7所示,机器人在弯道中利用机器人的柔顺特性,在进给力与障碍反弹力作用
下,机器人顺应通过障碍。
[0072]
如图8-10所示,机器人被动无法通过时,通过控制气动控制腔125的主动变形,使其顺利通过。
[0073]
如图11-12所示,机器人遇见小障碍物时,通过改变机器人整体刚度,增大机器人末端力,可以实现对小障碍物的快速清除,避免绕行降低行进效率。
[0074]
如图13-14所示,机器人在变刚度状态下,可以保持直线运动。
[0075]
如图15所示,为机器人成功通过狭缝搜救到被困人员的示意图。
[0076]
机器人外表包裹一层尼龙波纹管,既起到了提升软体机器人弯曲效率的效果,同时也能够防止机器人在废墟环境下工作时,机器人被锋利物体划伤的问题。
[0077]
通过机器人末端集成的摄像头与led灯,可以实现黑暗环境下的远程遥控操作,提高机器人的工作空间。当软体机器人找寻到被困人员时,软体机器人可以利用集成在机器人上的气液导管,为被困人员提供维生物质,此外还能利用自身携带的通讯设备,在被困人员与救援人员之间搭建通信渠道,能够向救援人员提供实时的内部环境信息,提高救援成功率。
[0078]
本发明的创新点在于:
[0079]
(1)采用模块化方法设计多向运动软体机械臂,可利用其变形穿过复杂环境。
[0080]
(2)提出纤维干扰变刚度技术,提高软体机械手的刚度,提升其环境适应能力。
[0081]
(3)利用机械臂的柔顺性,通过主被动控制使其能柔顺地“挤过”硬质障碍物,无需精确的运动规划,适应非结构化环境。
[0082]
(4)将提供补给的设施集成于软体装置,为被困者“输送”水、氧气、光和交流。
[0083]
(5)所设计的作品为灾后救援工作提供了新的解决方案,为被困者带来新希望。
[0084]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0085]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
