1.本发明涉及微机械电子系统(mems)领域,尤其是具有两端自由边界条件的弹性微梁谐振器。
背景技术:
2.参见文献[1],弹性微梁谐振器件主要由微梁、固定支撑和衬底构成。微梁的边界条件一般是单端固支(即悬臂式)、或两端固支。如图1所示,为常用的悬臂微梁器件结构原理图。图1中梁的长、宽和厚度方向分别是x、y和z方向,微梁和衬底之间施加有交流驱动电压。在交变静电力作用下,微梁沿厚度方向发生如图中虚线所示的弹性振动变形。微梁以固有频率振动,振动方向垂直于衬底。固定支撑和衬底是相对刚性的,无变形。悬臂的力学支撑边界条件在硅微机械加工中容易实现,所以应用非常广。例如,参见文献[2,3],长度为l悬臂微梁,它的变形曲线是y(x,t)=φ(x)f(t),φ(x)为梁的变形量,f(t)为时间函数。边界条件是:在梁的支撑处即x=0处,梁的变形量为零,梁的转角变形也为零(变形曲线的一阶导数为零),即
[0003][0004]
工程上,只需要将悬臂梁支撑处(x=0处)的刚度设计制造成绝对大,就可以实现支撑的力学边界条件。两端固支微梁则是在梁的两个支撑处即x=0和x=l处,梁的变形和转角变形都为零。只须将梁两端(x=0和x=l处)的刚度设计制造成绝对大。因此两端固支微梁在硅微机械加工中也很容易实现,应用也十分广泛。
[0005]
振动力学中还有一种两端都是自由的梁,也称自由-自由梁(参见文献[2,3]),即在x=0和x=l处梁内的弯矩和剪力都为零,即
[0006][0007]
两端自由梁有独特优点,例如,在结构尺寸(长、宽、厚)相同的情况下,它们的固有频率低于悬臂梁和两端固支梁,更适合于低频振动器件。但是,由于自由-自由边界条件在设计、制造中很难实现,目前还没有有效的技术方案能实现梁的两端自由支撑边界条件,所以自由-自由微梁的工程应用受阻,无法有效地发挥其性能优势。
[0008]
文献:
[0009]
[1]chang liu,foundations of mems,pearson education asia ltd,2008.
[0010]
[2]w.t.thomson,m d dahleh,theory of vibration with applications(fifth edtion),prentice hall,2005.
[0011]
[3]张义民,机械振动,清华大学出版社,2007.
技术实现要素:
[0012]
针对现有技术的不足,本发明提供一种具有两端自由边界条件的弹性微梁谐振
器。
[0013]
本发明采用的技术方案如下:
[0014]
一种具有两端自由边界条件的弹性微梁谐振器,包括衬底、第一固定支撑、第二固定支撑、支撑梁、自由-自由梁和固定电极,所述第一固定支撑和所述第二固定支撑设置在所述衬底的两端,并与衬底连接,第一固定支撑与所述自由-自由梁之间通过支撑梁连接,所述固定电极设置在所述第二固定支撑上,用于驱动自由-自由梁及支撑梁发生弹性弯曲变形,支撑梁的数量以及支撑梁在自由-自由梁上的支撑点的位置按以下规则确定:
[0015]
当自由-自由梁被要求工作在自身第n阶固有频率时,n 1个结构相同的支撑梁垂直支撑在自由-自由梁的同一侧,形成n 1个垂直支撑点,所述n 1个垂直支撑点为自由-自由梁的第n阶振型函数的n 1个节点;
[0016]
所述支撑梁与自由-自由梁的截面均为矩形且矩形的边长分别对应相等。
[0017]
进一步技术方案为:
[0018]
支撑梁长度l与自由-自由梁长度l的关系为:λn为自由-自由梁的第n阶特征常数,n≥1。
[0019]
所述支撑梁第一阶固有频率w
支撑-1
与所述自由-自由梁的第n阶固有频率w
自自-n
的关系为:
[0020][0021]
n=1时,支撑梁长度l与自由-自由梁长度l的关系为l=1.25l。
[0022]
所述支撑梁与所述自由-自由梁的材料相同,均采用单晶硅或多晶硅。
[0023]
本发明的有益效果如下:
[0024]
本发明利用自由-自由梁振型节点处位移为零的特点,设置支撑梁,近似实现了自由-自由边界条件。
[0025]
本发明的可根据固有频率范围准确设置支撑梁的数量和支撑位置,提高了自由-自由梁在不同工作频率下的适配性和有效性。
附图说明
[0026]
图1为现有技术中悬臂微梁器件的结构原理图。
[0027]
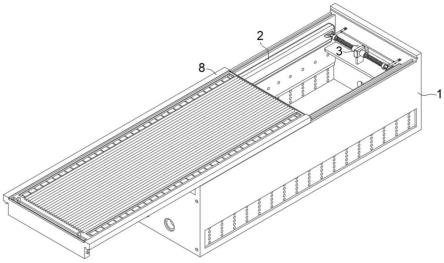
图2为本发明实施例的工作在第一阶固有频率处弹性微梁谐振器的结构尺寸示意图。
[0028]
图3为本发明实施例的自由-自由梁第一阶振型函数曲线。
[0029]
图4为本发明实施例的矩形截面的自由-自由梁的几何尺寸示意图。
[0030]
图5为本发明实施例的工作在第二阶固有频率处弹性微梁谐振器的结构尺寸示意图。
[0031]
图6为本发明实施例的自由-自由梁第二阶振型函数曲线。
[0032]
图7为利用商用有限元软件计算得到的本发明实施例的自由-自由梁的弯曲振型。
[0033]
图中:1、衬底;2、第一固定支撑;3、第二固定支撑;4、支撑梁;5、自由-自由梁;6、固定电极。
具体实施方式
[0034]
以下结合附图说明本发明的具体实施方式。
[0035]
本实施例的一种具有两端自由边界条件的弹性微梁谐振器,参见图2,图2中(a)、(b)分别为主视图和侧视图。包括衬底1、第一固定支撑、第二固定支撑3、支撑梁4、自由-自由梁5和固定电极6,第一固定支撑2和第二固定支撑3设置在衬底1的两端并与衬底1连接,支撑梁4的一端与第一固定支撑2固连、另一端支撑连接自由-自由梁5,固定电极6设置在第二固定支撑3上,用于驱动自由-自由梁5及支撑梁4发生弹性弯曲变形,支撑梁4的数量以及支撑梁4在自由-自由梁5上的支撑点的位置按以下规则确定:
[0036]
当自由-自由梁5被要求工作在自身第n阶固有频率时,n 1个结构相同的支撑梁4垂直支撑在自由-自由梁5的同一侧,形成n 1个垂直支撑点,n 1个垂直支撑点为自由-自由梁5的第n阶振型函数的n 1个节点;
[0037]
支撑梁4与自由-自由梁5的截面均为矩形且矩形的边长分别对应相等。
[0038]
进一步的,支撑梁4长度l与自由-自由梁5长度l的关系为:λn为自由-自由梁5第n阶特征常数,n≥1。
[0039]
进一步的,支撑梁4第一阶固有频率w
支撑-1
与自由-自由梁5的第n阶固有频率w
自自-n
的关系为:
[0040][0041]
具体的,支撑梁4与自由-自由梁5的材料相同,均采用单晶硅或多晶硅。
[0042]
如图2所示,为n=1时,弹性微梁谐振器的结构尺寸示意图。即当自由-自由梁5被要求工作在自身第一阶固有频率时,两个结构相同的支撑梁4垂直支撑在自由-自由梁5的同一侧,形成两个垂直支撑点,两个垂直支撑点为自由-自由梁5的第一阶振型函数的两个节点。
[0043]
第一阶振型函数的两个节点通过按照以下方法确定:
[0044]
自由-自由梁的振动变形为y(x,t)=φ1(x)q1(t),q1(t)为第一阶模态坐标,φ1(x)是与第一阶固有频率对应的自由-自由梁第一阶振型函数(模态函数),表达式为:
[0045][0046]
上式中λ1=4.73和γ1=0.9825都是第一阶振型常数。
[0047]
如图3所示,为第一阶振型函数φ1(x)曲线。显然,无论梁的长度l是多少,振型曲线φ(x)与0线有两个交点,交点位置分别在0.224l和0.776l处。在这两个交点处振型曲线数值为0,即梁的变形为零。这两个交(零)点即为振型函数的节点。
[0048]
两个几何尺寸一样的矩形截面梁支撑梁4垂直支撑在自由-自由梁的同一侧,具体为支撑梁的长边垂直于自由-自由梁的长边,垂直支撑点位于自由-自由梁5长边的两个振型节点处。两个支撑梁4的轴线分别与自由-自由梁5的轴线垂直相交。由于理论上振型函数的节点没有振动位移,所以支撑梁4不会跟随自由-自由梁振动。
[0049]
n=1时,支撑梁长度l与自由-自由梁长度l的关系按照以下方法确定:
[0050]
如图4所示,为矩形截面的自由-自由梁的几何尺寸示意图。图4中(a)、(b)分别为侧视图和截面图。梁的长、宽、厚度分别是l、b、h,坐标轴x、z、y方向分别是长、宽、厚方向。梁沿厚度方向(y方向)发生弹性变形。大多数梁以第一阶固有频率振动,自由-自由梁的第一阶固有频率表达式为:
[0051][0052]
上式中,e和ρ分别是梁材料的弹性模型和密度,λ1=4.73为自由-自由梁的第1阶特征常数,是自由-自由梁的截面惯性矩,a
自自
=bh是自由-自由梁的横截面积;
[0053]
两个支撑梁4有相同的几何尺寸,以下说明如何确定支撑梁4的长度l、宽度b、厚度h。
[0054]
支撑梁4的边界条件是悬梁的,其第一阶固有频率w
支撑-1
近似为:
[0055][0056]
为了降低制造成本,简化工艺,支撑梁的材料与自由-自由梁相同为单晶硅或多晶硅,采用常规的硅腐蚀加工工艺制造。二者具有相同的弹性模量e和密度ρ,支撑梁的宽度、厚度也等于自由-自由梁的宽度、厚度,即h=h,b=b,所以扭转支撑梁的惯性矩和横截面积如下:
[0057]a支撑
=bh=a
自自
。
[0058]
自由-自由梁5的第一阶固有频率w
自自-1
如下:
[0059][0060]
力学上,只有当支撑梁4厚度h=0时,自由-自由梁5的振动能量传递才不会传递的到支撑梁。由于强度、刚度等原因,支撑梁厚度h不可能为零,所以会有一点自由-自由梁的振动能量传递到支撑梁。工程中一般梁长度l远远大于厚度h,所以传递到支撑梁的能量很少。此外,自由-自由梁以第一阶固有频率振动,交流驱动电压的频率就是它的第一阶固有频率振动。按振动理论,如果支撑梁自身的第一阶固有频率远小于自由-自由梁第一阶固有频率,支撑梁的振动将非常微小。
[0061]
因此,本技术提出的支撑梁自身的第一阶固有频率小于或等于自由-自由梁的第一阶固有频率的十分之一。
[0062]
利用得支撑梁长度l与自由-自由梁长度l的关系l≥1.2534l。考虑到支撑梁l越长,器件总体尺寸、质量也越大,所以本技术优选l=1.25l。
[0063]
同理,当梁被要求工作在高阶(第n阶)固有频率,尤其是第二、三阶固有频率,上述原理同样适用。
[0064]
如图5所示,为n=2时,弹性微梁谐振器的结构尺寸示意图。即当自由-自由梁5被要求工作在自身第二阶固有频率时,三个结构相同的支撑梁4垂直支撑在自由-自由梁5的
同一侧,形成三个垂直支撑点,三个垂直支撑点为自由-自由梁5的第二阶振型函数的两个节点。图5中(a)、(b)分别为主视图和侧视图。
[0065]
第二阶振型函数的两个节点通过按照以下方法确定:
[0066]
φ2(x)是与第二阶固有频率对应的自由-自由梁第二阶振型函数(模态函数),表达式为:
[0067][0068]
上式中,λ2=7.853和γ2=1.0008都是自由-自由梁的第二阶振型常数。
[0069]
如图6所示,是第二阶振型函数φ2(x)曲线。显然,无论梁的长度l是多少,振型曲线φ2(x)与0线有三个交点,交点位置分别在0.132l、0.5l和0.868l处。在这三个交点处振型曲线数值为0,即梁的变形为零。这三个交(零)点即为振型函数的节点。
[0070]
n=2时,支撑梁长度l与自由-自由梁长度l的关系确定方法同上。自由-自由梁的第二阶固有频率是:
[0071][0072]
支撑梁第一阶固有频率w
支撑-1
也必须远小于自由-自由梁的第二阶固有频率w
自自-2
,利用支撑梁长度l与自由-自由梁长度l的关系为:l≥0.76l。
[0073]
考虑到避免尺寸过大,本技术优选l=0.76l的支撑梁。
[0074]
综上,工作在第n固有频率w
自自-n
的自由-自由梁:
[0075][0076]
支撑梁第一阶固有频率w
支撑-1
远小于自由-自由梁的第n阶固有频率w
自自-n
,利用支撑梁长度l与自由-自由梁长度l的关系为:
[0077]
λn是自由自由梁第n阶特征常数,λ1=4.730,λ2=7.853,λ3=10.996;
[0078]
n≥4时,λn=(n 1/2)π。
[0079]
本技术优选的支撑梁。
[0080]
以下采用仿真计算验证本技术方案的技术效果。
[0081]
对于一个工作在第一阶固有频率的自由-自由梁,长、宽、厚度分别是l=700μm、b=40μm和h=20μm。支撑梁长l=1.25l=700*1.25=875μm,宽b=b=40μm,厚h=h=20μm。如图7所示,为采用商用有限元软件计算的自由-自由梁的弯曲振型。显然,图7的弯曲振型形状与图3所示的理论形状很接近。
[0082]
本技术的技术方案能实现梁的两端自由支撑边界条件,有助于自由-自由微梁的工程应用有效地发挥其性能优势。
[0083]
本领域普通技术人员可以理解:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员
来说,其依然可以对前述各实施例记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。