技术特征:
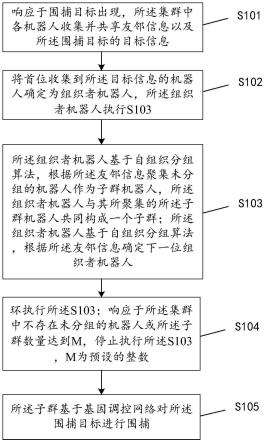
1.一种基于自组织分组的目标围捕方法,其特征在于,多个机器人构成整个集群,所述方法包括:响应于围捕目标出现,所述集群中各机器人收集并共享友邻信息以及所述围捕目标的目标信息;将首位收集到所述目标信息的机器人确定为组织者机器人,所述组织者机器人执行第一过程;所述第一过程包括:所述组织者机器人基于自组织分组算法,根据所述友邻信息聚集未分组的机器人作为子群机器人,所述组织者机器人与其所聚集的所述子群机器人共同构成一个子群;所述组织者机器人基于自组织分组算法,根据所述友邻信息确定下一位组织者机器人;循环执行所述第一过程;响应于所述集群中不存在未分组的机器人或所述子群数量达到m,停止执行所述第一过程,m为预设的整数;所述子群基于基因调控网络对所述围捕目标进行围捕。2.根据权利要求1所述的基于自组织分组的目标围捕方法,其特征在于,所述将首位收集到所述目标信息的机器人确定为组织者机器人,包括:将未收集到所述目标信息的机器人标记为第一状态;响应于收集到所述目标信息,机器人将所述第一状态转换为第二状态;将首位标记为所述第二状态的机器人确定为所述组织者机器人。3.根据权利要求1所述的基于自组织分组的目标围捕方法,其特征在于,所述第一过程还包括:响应于聚集的所述子群机器人的数量达到n,所述组织者机器人停止聚集所述子群机器人,并开始确定下一位组织者机器人,n为预设的整数。4.根据权利要求3所述的基于自组织分组的目标围捕方法,其特征在于,所述组织者机器人基于自组织分组算法,根据所述友邻信息聚集未分组的机器人作为子群机器人,包括:所述组织者机器人对与邻域内各未分组的机器人的距离进行升序排序,召集距离最近的n个未分组的机器人作为所述子群机器人。5.根据权利要求1所述的基于自组织分组的目标围捕方法,其特征在于,所述组织者机器人基于自组织分组算法,根据所述友邻信息确定下一位组织者机器人,包括:所述组织者机器人对邻域内各未分组的机器人的邻居数进行降序排序,确定邻居数最大的未分组的机器人作为下一位组织者机器人。6.根据权利要求5所述的基于自组织分组的目标围捕方法,其特征在于,所述组织者机器人基于自组织分组算法,根据所述友邻信息确定下一位组织者机器人,还包括:响应于邻域内邻居数最大且未分组的机器人有多个,则将邻域内多个所述邻居数最大且未分组的机器人作为候选机器人,所述组织者机器人将与自己距离最近的所述候选机器人作为下一位组织者机器人。7.根据权利要求1所述的基于自组织分组的目标围捕方法,其特征在于,在所述围捕目标出现之前,还包括:所述集群中的所有机器人初始化本地信息。8.一种基于自组织分组的目标围捕装置,其特征在于,多个机器人构成整个集群,所述装置包括:
信息收集模块,被配置为响应于围捕目标出现,所述集群中各机器人收集并共享友邻信息以及所述围捕目标的目标信息;自组织分组模块,被配置为将首位收集到所述目标信息的机器人确定为组织者机器人,所述组织者机器人执行第一过程;所述第一过程包括:所述组织者机器人基于自组织分组算法,根据所述友邻信息聚集未分组的机器人作为子群机器人,所述组织者机器人与其所聚集的所述子群机器人共同构成一个子群;所述组织者机器人基于自组织分组算法,根据所述友邻信息确定下一位组织者机器人;循环执行所述第一过程;响应于所述集群中不存在未分组的机器人或所述子群数量达到m,停止执行所述第一过程,m为预设的整数;基因调控模块,被配置为所述子群基于基因调控网络对所述围捕目标进行围捕。9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至7任意一项所述的方法。10.一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,其特征在于,所述计算机指令用于使计算机执行权利要求1至7任一所述方法。
技术总结
本申请提供一种基于自组织分组的目标围捕方法及相关设备,多个机器人构成整个集群,所述方法采用自组织分组的方式对围捕目标进行围捕,先将首位发现围捕目标的机器人确定为组织者机器人,所述组织者机器人的分组过程包括:所述组织者机器人根据友邻信息聚集未分组的机器人并与之共同构成一个子群后,再根据友邻信息确定下一位组织者机器人;所述集群循环执行上述组织者机器人的分组过程,直至集群中不存在未分组的机器人或子群数量达到期望值,最后每个子群基于基因调控网络对围捕目标进行围捕。上述自组织分组过程可以消除基因调控网络的浓度深渊,保证了分组效率与较低的节点通信开销,使子群有较高的聚集程度,保证了集群运动有较好的鲁棒性。群运动有较好的鲁棒性。群运动有较好的鲁棒性。
技术研发人员:朱晓敏 包卫东 袁宇彤 欧阳佶 马力 张耀鸿 王吉 周文 张亮
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2022.03.11
技术公布日:2022/6/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。