1.本发明涉及船用起重机的技术领域,尤其涉及用于海上应用的铰接吊杆式起重机的技术领域。
背景技术:
2.近年来,已经针对风电场服务作业船舶(sov)发展出了新的市场。
3.这种船舶用于运输工具和备件,以便干预海上风力涡轮机,这些海上风力涡轮机在附接到基座的平台上离开海岸安装。
4.现在,深海海上操作由于波浪引起的船舶运动而变得复杂。尽管有这种环境,但负载的受控处理对于安全工作是必要的。
5.为弥补这些限制,船舶必须装备有具有特定要求的起重机。
6.实际上,负载和起重机吊杆端的定位精度对于避免与风力涡轮机平台碰撞是至关重要的。
7.这种约束涉及在起重机的高度处补偿船舶在所有方向上的运动。
8.为此,一种方法是设计一种起重机,其起重吊杆被修改为具有悬臂,该悬臂可平移移动地安装在主吊杆上。
9.另一种方法是在工具和吊杆端部之间增加专用的界面。
10.现有技术的这些解决方案不能完全令人满意,需要一种新的解决方案来提供对船舶在所有方向上的运动的补偿。
技术实现要素:
11.为弥补现有技术的上述缺点,本发明提出一种用于海上应用的铰接吊杆(折杆,带有关节的吊杆,带有转向节的吊杆)式起重机(吊机)。
12.该铰接吊杆式起重机包括:
[0013]-起重机壳座(支承结构),
[0014]-铰接吊杆,所述铰接吊杆由所述起重机壳座承载,
[0015]-用于操作所述起重机壳座和所述铰接吊杆的操作装置,以及
[0016]-控制装置,用于控制(操控,操纵,引导)所述操作装置。
[0017]
铰接吊杆包括串联的主吊杆和悬臂(末端吊杆),所述主吊杆和所述悬臂各自具有上游端和下游端。
[0018]
起重机壳座包括用于限定铰接吊杆围绕回转(枢转)轴的回转运动的铰接/关节装置(或回转机构)。
[0019]
起重机壳座和主吊杆的上游端通过上游铰接装置配合,以限定所述主吊杆围绕上游铰接轴的摆动(或俯仰)运动(俯仰)。
[0020]
主吊杆的下游端和悬臂的上游端通过下游铰接装置配合,以限定所述悬臂绕下游铰接轴的折叠运动(折叠)。
[0021]
所述操作装置包括:
[0022]-至少一个回转致动器,用于产生所述铰接吊杆的回转运动,
[0023]-至少一个第一线性致动器(俯仰缸),用于产生所述主吊杆的所述俯仰运动,以及
[0024]-至少一个第二线性致动器(折叠缸),用于产生所述悬臂的所述折叠运动。
[0025]
所述控制装置包括主动(3d)补偿装置,该补偿装置设计成在考虑来自运动参考单元(mru)的数据的情况下控制所述操作装置,以使所述悬臂的下游端有利地在水平面中和/或竖直位置中、还优选在所有方向上稳定。
[0026]
因此,本发明通过组合地控制铰接吊杆的回转运动、主吊杆的俯仰运动和悬臂的折叠运动来提供悬臂的下游端的稳定。
[0027]
根据特定实施例,所述至少一个第二线性致动器连接到所述起重机壳座和所述悬臂。
[0028]
在这种实施例中,由连接到起重机壳座(而不是主吊杆)的所述至少一个第二线性致动器实施的悬臂的折叠运动需要用于主吊杆的摆动运动的动力减小。这种方法是令人感兴趣的,因为主吊杆的摆动(或俯仰)运动在补偿模式中消耗了大部分能量。
[0029]
根据本发明的该实施例的其它非限制性和有利的特征—可以单独地应用或根据所有技术上的可能进行组合—如下:
[0030]-所述至少一个第二线性致动器通过机械传动装置连接到所述悬臂;优选地,所述至少一个第二线性致动器具有两个端部,即,直接与起重机壳座组装的上游端部和通过机械传动装置与悬臂组装的下游端部;
[0031]-所述机械传动装置包括可变形的平行四边形结构,所述平行四边形结构包括至少一个纵向臂和至少两个摆臂,所述至少一个纵向臂插置于所述至少一个第二线性致动器与所述悬臂之间,有利地与主吊杆相对地沿着所述主吊杆延伸,所述至少两个摆臂各自插置于所述纵向臂与所述主吊杆之间;优选地,所述传动装置还包括连接构件,所述连接构件插置于所述至少一个纵向臂的下游端与所述悬臂的上游端之间,所述连接构件使所述悬臂在其上游端一侧上延伸,所述至少一个纵向臂的所述下游端通过铰接装置与所述连接构件配合。
[0032]
根据本发明的产品的其它非限制性且有利的特征—可以单独地应用或根据所有技术上的可能进行组合—如下:
[0033]-所述至少一个第一线性致动器(俯仰缸)布置在所述起重机壳座与所述主吊杆之间;优选地,所述至少一个第一线性致动器和所述至少一个第二线性致动器植入(嵌入,固定)在主吊杆的两侧,例如分别与下前壁和上前壁相对;
[0034]-所述铰接吊杆式起重机包括绞车滚筒,该绞车滚筒与旋转驱动装置相关联并且用于接收细长的提升构件;优选地,所述主动补偿模块设计成还在考虑来自所述运动参考单元的数据的情况下控制所述绞车滚筒以便控制所述绞车滚筒的卷绕运动;
[0035]-所述至少一个第一线性致动器和/或所述至少一个第二线性致动器包括液压缸或电动缸;
[0036]-所述补偿模块包括用于收集来自所述运动参考单元(mru)的数据的装置、用于确定用于所述操作装置并适于使所述悬臂的下游端稳定的控制指令或甚至用于所述卷筒的控制指令的处理装置,以及用于在考虑所述控制指令的情况下控制所述操作装置或甚至还
控制所述绞车滚筒的控制装置;
[0037]-所述铰接吊杆式起重机包括运动参考单元(mru)。
[0038]
通常,根据特定实施例,铰接吊杆式起重机还包括通过连接装置固定到悬臂的下游端上的平台。
[0039]
所述连接装置包括至少两个致动器的组合:
[0040]-至少一个第一回转致动器,所述至少一个第一回转致动器用于产生所述平台相对于所述下游端围绕与所述铰接吊杆的回转轴平行的偏航旋转轴的回转运动,以及
[0041]-至少一个第二回转致动器,所述至少一个第二回转致动器用于产生所述平台相对于所述下游端围绕与所述上游铰接轴和所述下游铰接轴平行的俯仰旋转轴的回转运动。
[0042]
所述主动补偿模块设计成在考虑来自运动参考单元的数据的情况下控制所述连接装置的所述至少两个致动器,以便主动地使所述平台有利地在偏航(左右摆动)和俯仰(纵摇,前后颠簸)方面稳定。
[0043]
与平台相关的其它非限制性和有利的特征—可以单独地应用或根据所有技术上的可能进行组合—如下:
[0044]-所述连接装置包括连结构件,所述连结构件集成所述至少两个致动器,所述连结构件具有两个端部:第一上端,其固定到悬臂的所述下游端;以及第二下端,其固定到所述平台;优选地,所述第一端包括所述至少一个第二回转致动器,所述第二端包括所述至少一个第一回转致动器;还优选地,所述连结构件横向地固定到悬臂的下游端,所述连结构件包括两个部段:上部部段,其为直线的且平行于偏航旋转轴,使得俯仰旋转轴穿过悬臂的所述下游端,以及下部弯曲部段,其使得偏航旋转轴穿过悬臂的所述下游端;
[0045]-所述连接装置包括阻尼装置,该阻尼装置有利地是被动的,所述阻尼器装置提供所述平台沿着与所述偏航旋转轴平行的平移轴相对于所述悬臂的下游端的平移自由度;
[0046]-所述平台是适于接纳至少一个个体的驾驶室的形式;
[0047]-所述平台包括至少一个被动的减振器,该减振器适于吸收与环境的接触/振动;
[0048]-所述平台配备有用于手动控制所述连接装置的所述至少两个致动器的装置;
[0049]-所述悬臂的下游端和所述连接装置通过可拆除的连接装置配合,从而集成电的和机械的连接装置。
[0050]
本发明还涉及一种用于海上应用的航行器,其装备有根据本发明的铰接吊杆式起重机,例如为风电场服务作业船(sov)。
[0051]
本发明还涉及上述平台本身及其连接装置。
[0052]
当然,本发明的不同特征、变型和实施例可以根据各种组合彼此关联,只要它们彼此兼容或不排斥即可。
附图说明
[0053]
此外,本发明的各种其它特征从参照示出本发明的非限制性实施例的附图进行的所附描述中显现,其中:
[0054]
图1是根据本发明的铰接吊杆式起重机的整体透视图;
[0055]
图2是根据本发明的铰接吊杆式起重机的整体侧视图;
[0056]
图3是铰接吊杆式起重机的局部放大图,更详细地示出了主吊杆;
[0057]
图4是根据本发明的铰接吊杆式起重机的整体透视图,其配备有通过特定连接装置固定到悬臂的下游端的平台(呈驾驶室的形式);
[0058]
图5是根据图4的铰接吊杆式起重机的局部放大图,更详细地示出了平台和连接装置;
[0059]
图6是根据本发明的铰接吊杆式起重机的总体视图,该铰接吊杆式起重机处于其与接收表面相对定位期间并且配备有平台(呈驾驶室的形式)。
[0060]
应当注意,在这些图中,不同变型所共有的结构和/或功能元件可以具有相同的附图标记。
具体实施方式
[0061]
根据本发明的铰接吊杆式吊车1—也称为“起重机”—适于海上应用。
[0062]
这种铰接吊杆式吊车1有利地设计成装配在用于海上应用的航行器(未示出,也称为“海上航行器”)上。
[0063]
该起重机1因此适于被板载于“海上”航行器、例如服务作业船舶上。
[0064]
术语“航行器”特别包括海上航行器、特别是船舶,例如风电场服务作业船舶或风电场sov。
[0065]
该起重机1因此可以被用于—但不限制于—操纵工具和备件,以便干预海上风力涡轮机。
[0066]
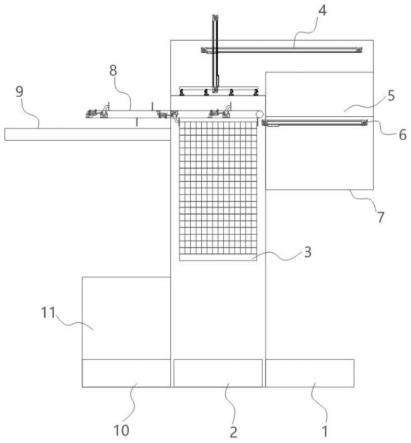
如图1和2示意性地示出的,铰接吊杆式起重机1包括:
[0067]-起重机壳座2,其形成起重机1与航行器的接口,
[0068]-铰接吊杆3,其由所述起重机壳座2承载,
[0069]-操作装置4,其用于操作铰接吊杆3、特别是该铰接吊杆的下游端,这将在下文中描述,以及
[0070]-控制装置5,其用于控制所述操作装置4。
[0071]
起重机壳座2有利地由桶状件或柱状件(桅杆)组成。
[0072]
该起重机壳座2包括铰接装置(或回转机构)21、例如球轴承回转环,以限定铰接吊杆3围绕回转轴21'的回转运动。
[0073]
因此,回转轴21'为铰接吊杆3提供了旋转自由度。
[0074]
铰接吊杆3包括从起重机壳座2串联组装的两个吊杆部分31、32(也称为臂或节段):
[0075]-上游或近侧的主吊杆31,和
[0076]-下游或远侧的悬臂32。
[0077]
主吊杆31和悬臂32各自具有:
[0078]-位于起重机壳座2侧的上游端312、322,以及
[0079]-远离所述起重机壳座2定位的下游端313、323。
[0080]
主吊杆31和悬臂32—在此总体上为平行六面体形状—还各自具有两个相对的面:
[0081]-下表面314、324,也称为“下前壁”,用于向下/朝向地面,以及
[0082]-上表面315、325,也称为“上前壁”,用于向上/朝向天空。
[0083]
起重机壳座2和主吊杆31的上游端312通过上游铰接装置35配合,以限定所述主吊
杆31围绕上游铰接轴35'的摆动(或上下摆动)运动,该铰接轴有利地是水平的并且垂直于回转轴21'。
[0084]
因此,主吊杆31旨在相对于起重机壳座2围绕位于其上游端312处的该上游铰接轴35'旋转。
[0085]
主吊杆31的下游端313和悬臂32的上游端322通过下游铰接装置36配合,以限定所述悬臂32围绕下游铰接轴36'的折叠运动,该下游铰接轴有利地是水平的并且垂直于回转轴21'。
[0086]
因此,悬臂32旨在围绕位于其上游端322的下游铰接轴36'相对于主吊杆31旋转。
[0087]
上游铰接装置35和下游铰接装置36有利地包括例如滚动轴承形式的铰接件,所述关节布置在组装的端部(例如,轴承/轴颈类型的端部)之间。
[0088]
上游铰接轴35'和下游铰接轴36'彼此平行地延伸,有利地水平延伸。
[0089]
悬臂32的下游端323在空间中由被控制装置5控制的操作装置4控制。
[0090]
特别地,下游端323可有利地根据笛卡尔参考系中限定的位置沿着三个轴(也称为维度或方向)移动,即有利地:
[0091]-宽度(左/右),沿着水平轴x(横坐标),
[0092]-深度(前/后),沿着水平轴y(纵坐标),以及
[0093]-高度(顶/底),沿着竖直轴z。
[0094]
为此,操作装置4包括:
[0095]-至少一个回转致动器41,用于产生所述铰接吊杆3的回转运动,
[0096]-至少一个第一线性致动器42(也称为“俯仰摆动缸”),例如一个线性致动器或两个平行的线性致动器,用于产生主吊杆31围绕其上游铰接轴35'的摆动(或俯仰摆动)运动,以及
[0097]-至少一个第二线性致动器43(也称为“折叠缸”),例如一个线性致动器或两个平行的线性致动器,用于产生悬臂32围绕其下游铰接轴36'的折叠运动。
[0098]
如下文结合图3所述的,所述至少一个第一线性致动器42和所述至少一个第二线性致动器43各自具有两个端部:
[0099]-位于起重机壳座2侧的上游端421、431,以及
[0100]-与起重机壳座2相背的下游端422、432。
[0101]
上游端421、431和下游端422、432有利地通过上、下游铰接装置组装在起重机1内,所述上、下游铰接装置有利地包括铰接件,例如以滚动轴承的形式(例如,轴承/轴颈类型)。
[0102]
通常,所述至少一个回转致动器41例如包括集成到起重机壳座2的马达构件。
[0103]
线性致动器42、43有利地包括液压缸,所述液压缸优选与液压动力单元(未示出)相关联。线性致动器42、43也可以包括电动缸。
[0104]
根据本发明,控制装置5设计成以稳定(在空间中,有利地沿三个轴)悬臂32的下游端323的方式控制操作装置4。
[0105]
优选地,控制装置5设计成使悬臂32的下游端323稳定在水平面中和/或竖直位置中,或甚至在所有方向上稳定。
[0106]“水平面”有利地是指在由宽度(x轴或横坐标,水平)和深度(y轴或纵坐标)限定的平面中的稳定性。
[0107]“竖直位置”有利地是指高度(z轴或高度轴,竖直)的稳定。
[0108]“所有方向”有利地是指宽度(x轴或横坐标,水平)、深度(y轴或纵坐标)和高度(z轴或高度轴,垂直)的稳定性。
[0109]
为此,控制装置5包括主动(3d)补偿模块51,其设计成在考虑来自运动参考单元(mru)7的数据的情况下控制操作装置4,以便使起重机臂32的下游端323有利地在水平面中和/或竖直位置中或者甚至在所有方向上稳定。
[0110]
主动补偿模块51因此设计成以补偿由波浪引起的起重机1的运动、特别是悬臂32的下游端323的运动的方式来控制操作装置4。
[0111]
因此,这种主动补偿模块51提供悬臂32的下游端323的精确定位,使得可以将悬臂32的下游端323保持在恒定位置。
[0112]
根据优选实施例,主动补偿模块51包括:
[0113]-收集装置511,用于收集来自运动参考单元7的数据,
[0114]-处理装置512,用于确定用于操作装置4的控制指令,适于稳定悬臂32的下游端323,以及
[0115]-控制装置513,用于在考虑所述控制指令的情况下控制所述操作装置4。
[0116]
实际上,控制装置5包括计算机。主动补偿模块51包括包含指令的计算机程序,当所述计算机程序由所述计算机执行时,所述指令在所述计算机上执行时形成数据收集装置511、处理装置512和控制装置513。
[0117]
主动补偿模块51因此有利地形成受计算机控制的系统,所述受计算机控制的系统使得可以使用操作装置4保持悬臂32的下游端323的位置(补偿由波浪引起的运动)。
[0118]
根据具体实施例,操作可经由控制装置5来控制铰接吊杆式起重机1,由波浪引起的运动由主动补偿模块51补偿。
[0119]
处理装置512有利地包括数学模型或算法,其确定用于操作装置4的控制指令、适于根据来自运动参考单元7的数据使悬臂32的下游端323稳定(或者,换句话说,补偿由波浪引起的运动)。
[0120]
因此,实际上,操作装置4由根据本发明的主动补偿模块51控制,以便操作悬臂32的下游端323,有利地沿着三个轴,考虑来自运动参考单元7的信息,从而使悬臂32的该下游端323稳定(在空间中,有利地沿着三个轴)。
[0121]
例如,悬臂32的下游端323尤其可沿着以下轴操作:
[0122]-宽度,通过所述回转致动器41与所述第一线性致动器42和所述第二线性致动器43的协同控制,
[0123]-深度,通过第一线性致动器42和第二线性致动器43的协调控制,以及
[0124]-高度,通过第一线性致动器42和第二线性致动器43的协调控制。
[0125]
通常,运动参考单元7可以在本领域技术人员已知的运动参考单元7中选择。
[0126]
这种运动参考单元7有利地本身是常规的,其设计成记录和评估由于波浪引起的船舶位移以及—作为推论—悬臂32的下游端323的位移。
[0127]
该运动参考单元7例如包括惯性单元。
[0128]
铰接吊杆式起重机1可以包括该运动基准单元7;作为替代,该运动参考单元7可以安装在航行器上。
[0129]
实际上,如图2所示,铰接吊杆3具有两个作用半径:
[0130]-最大作用半径r1,和
[0131]-在补偿模式中的标称最大作用半径r2(在此低于最大作用半径r1)。
[0132]
图1至3中所示的铰接吊杆3特别适于安装在铰接吊杆式起重机1上,该铰接吊杆式起重机的控制装置5包括这种主动补偿模块51。
[0133]
通常,根据本发明的这种铰接吊杆3是固有地令人感兴趣的,可能安装在其控制装置5没有这种主动补偿模块51或补偿模式51被禁用的铰接吊杆式起重机1上。
[0134]
实际上,所述至少一个第二线性致动器43在此具有特定的实施方式,因为其在此连接到起重机壳座2和悬臂32。
[0135]
现在,如上所述,由连接到起重机壳座2的所述至少一个第二线性致动器43实现的悬臂32的折叠运动需要用于主吊杆31的摆动运动的减小的动力。该方法是令人感兴趣的,因为主吊杆31的摆动(或俯仰)运动在补偿模式中消耗大部分能量。
[0136]
为此,所述至少一个第二线性致动器43有利地通过机械传动装置45连接到悬臂32(尤其参见图3)。
[0137]
在该框架内,如下文结合图3所述,所述至少一个第二线性致动器43有利地具有两个端部:
[0138]-直接与起重机壳座2组装的上游端431,以及
[0139]-通过机械传动装置45与悬臂32组装的下游端432。
[0140]
在该框架内,所述至少一个第二线性致动器43可有利地通过以下操作纵向地操作:
[0141]-伸长,其导致悬臂32朝向主吊杆31折叠,以及
[0142]-缩短,其导致悬臂32相对于主吊杆31延伸。
[0143]
这里,机械传动装置45包括可变形的平行四边形结构46,其包括:
[0144]-至少一个纵向臂461,其插置于所述至少一个第二线性致动器43和悬臂32之间,以及
[0145]-至少两个摆臂462,每个摆臂插置于纵向臂461和主吊杆31之间。
[0146]
在图3中,所述至少一个纵向臂461有利地沿着主吊杆31、特别是其上前壁315并且与之相对地延伸。
[0147]
所述至少一个纵向臂461还具有两个端部:
[0148]-上游端4611,其在此通过枢轴连接件与所述至少一个第二线性致动器43的下游端432组装,以及
[0149]-下游端4612,其在此通过枢转连接件与悬臂32的上游端322组装。
[0150]
所述至少两个摆臂462(在此为梯形或h形)与纵向臂461和主吊杆31组装在一起,从而可以转动(自由转动)。
[0151]
特别地,摆臂462在此与主吊杆31的上前壁315组装在一起。
[0152]
上游摆臂4621:
[0153]-在第一侧上与主吊杆31(朝向其上游端312)组装在一起,并且
[0154]-在第二侧上与由所述至少一个纵向臂461的上游端4611和所述至少一个第二线性致动器43的下游端432组成的对组装在一起。
[0155]
下游摆臂4622:
[0156]-在第一侧上与主吊杆31(朝向其下游端313)组装在一起,并且
[0157]-在第二侧上与由所述至少一个纵向臂461的下游端4612和悬臂32的上游端322组成的对组装在一起。
[0158]
根据本实施例,特别在图3中示出,机械传动装置45还包括连接构件47,其插置于所述至少一个纵向臂461的下游端4612与悬臂32的上游端322之间。
[0159]
该连接构件47使悬臂32在其上游端322一侧上延伸。
[0160]
所述至少一个纵向臂461的下游端4612通过铰接装置475(枢轴)与该连接构件47配合。
[0161]
在此,该连接构件47由两个部分构成:
[0162]-延伸区段325,其使悬臂32延伸超过下游铰接装置36并且在主吊杆31的上前壁315的一侧上延伸,以及
[0163]-中间臂471,其在此形成连接杆,通过铰接连接装置472(枢轴)与所述至少一个纵向臂461的下游端4612和所述延伸部分325组装。
[0164]
换句话说,机械传动装置45包括连杆-曲柄组件,其中中间臂471形成连杆,延伸部分325形成曲柄。
[0165]
此外,所述至少一个第一线性致动器42(也称为“俯仰缸”)设置在起重机壳座2和主吊杆31之间。
[0166]
所述至少一个第一线性致动器42在此与主吊杆31的下前壁314相对地延伸。
[0167]
在此,所述至少一个第一线性致动器42有利地具有两个端部:
[0168]-直接与起重机壳座2组装的上游端421,以及
[0169]-在主吊杆的下前壁314处与该主吊杆31组装的下游端422。
[0170]
通常,所述至少一个第一线性致动器42和所述至少一个第二线性致动器43被植入在主吊杆31的任一侧上,例如分别与其下前壁314和上前壁315相对。
[0171]
通常,如图1中特别示出的,铰接吊杆式起重机1还可以包括绞车滚筒8,其与旋转驱动装置(未示出,例如为至少一个马达,有利地为电动的或液压的)相关联,并且用于接收细长的提升构件81(有利地为缆索,例如金属缆索或合成缆索)。
[0172]
绞车滚筒8在此由悬臂32承载,在其上表面325处并且在其上游端322侧上。
[0173]
铰接吊杆3有利地装备有滑轮82,该滑轮在此沿着悬臂32分布,它们的尺寸、分布和布置设计成使得在绞车滚筒8和待提升的负载(未示出)之间引导细长提升构件81。
[0174]
根据有利的实施例,主动补偿模块51设计成还在考虑来自运动参考单元7的数据的情况下控制绞车滚筒8(特别是其旋转驱动装置),以便控制绞车滚筒8的卷绕(和退绕)运动。
[0175]
在该实施例中,绞车滚筒8可用于使竖直补偿平滑,以便保持细长提升构件81的自由端的竖直位置。
[0176]
这种方法的优点是,允许与铰接吊杆3的运动相结合的垂直二阶校正(在高度上)。
[0177]
仍然在该实施例中,悬臂32的下游端323的稳定(通过操作装置4的控制)与绞车滚筒8的卷绕运动相协调。
[0178]
根据该实施例,主动补偿模块51尤其包括:
[0179]-处理装置512,用于确定用于操作装置4的控制指令,适于稳定悬臂32的下游端323,并且视情况而定,用于确定用于绞车滚筒8(特别是其旋转驱动装置)的控制指令,适于使竖直补偿平滑,以及
[0180]-控制装置513,用于在考虑控制指令的情况下控制操作装置4,并且有利地控制绞车滚筒8(特别是其旋转驱动装置)。
[0181]
主动补偿模块51因此有利地形成受计算机控制的系统,其使得可以使用操作装置4保持悬臂32的下游端323,或者甚至还可以将细长的提升构件81的自由端(旨在与负载配合)保持在确定的竖直位置。
[0182]
处理装置512有利地包括数学模型或算法,其根据来自运动参考单元7的数据确定用于操作装置4的控制指令,适于稳定悬臂32的下游端323(还参见用于绞车滚筒8、特别是其旋转驱动装置的控制指令,适于将细长提升构件81的自由端竖直地稳定在确定的竖直位置)。
[0183]
根据图4和5所示的有利技术特征,铰接吊杆式起重机1还有利地包括平台9,其通过连接装置10固定到悬臂32的下游端323。
[0184]“平台”有利地是指旨在接收个体(通常为驾驶室)或负载以转移它们的结构。
[0185]
平台9有利地通过连接装置10悬挂到铰接吊杆3。
[0186]
通常,连接装置10确保在铰接吊杆3的运动期间平台9的主动稳定。
[0187]
这种主动稳定有利地至少围绕俯仰旋转轴(有利地为水平的)和偏航旋转轴(有利地为竖直的)介入。
[0188]
换句话说,平台9有利地限定了接收平面91,该接收平面有利地旨在被水平地稳定,有利地在偏航和俯仰方面。
[0189]
特别地,平台9因此与铰接吊杆3配合,使得:
[0190]-悬臂32的下游端323在空间中是稳定的,有利地围绕三个轴稳定,以及
[0191]-平台9相对于悬臂32的下游端323的运动是稳定的(优选地在偏航和俯仰方面)。
[0192]
为此,连接装置10包括至少两个致动器101、102的组合:
[0193]-至少一个第一回转致动器101,其旨在根据与铰接吊杆3的回转轴21'平行的偏航旋转轴101'产生平台9相对于下游端323的回转运动,以及
[0194]-至少一个第二回转致动器102,其旨在产生所述平台9相对于所述下游端323围绕与上游铰接轴35'和下游铰接轴36'平行的俯仰旋转轴102'的回转运动。
[0195]
偏航旋转轴101'和俯仰旋转轴102'有利地在相同的平面中延伸;偏航旋转轴101'和俯仰旋转轴102'优选地彼此交叉90
°
。
[0196]
换句话说,所述至少两个致动器101、102包括:
[0197]-所述至少一个第一回转致动器101,其旨在产生平台9围绕与接收平面91垂直的偏航旋转轴101'的回转运动,以及
[0198]-所述至少一个第二回转致动器102,其旨在产生所述平台9围绕与所述接收平面91平行的俯仰旋转角度102'的回转运动。
[0199]
致动器101、102有利地包括旋转致动器,例如马达,优选电动马达。
[0200]
在该实施例中,主动补偿模块51有利地设计成还在考虑来自运动参考单元(有利地装配在平台9上)的数据的情况下控制装配在连接装置10上的致动器101、102,以便有利
地在偏航和俯仰方面主动地稳定平台9。
[0201]
因此,主动补偿模块51设计成以防止由铰接吊杆3的运动产生的摇摆的方式来控制连接装置10的致动器101、102,特别是悬臂32的下游端323的运动。
[0202]
主动补偿模块51因此提供平台9相对于悬臂32的下游端323的运动的主动稳定。
[0203]
在该框架内,根据优选实施例,主动补偿模块51包括:
[0204]-处理装置512,用于还确定用于连接装置10的致动器101、102的控制指令,适于主动地稳定平台9,以及
[0205]-控制装置513,用于在考虑所述控制指令的情况下控制连接装置10的致动器101、102。
[0206]
因此,主动补偿模块51有利地形成受计算机控制的系统,其允许使用连接装置10的致动器101、102来稳定平台9(防止或补偿由铰接吊杆3的运动引起的摇摆)。
[0207]
因此,实际上,连接装置10的致动器101、102由根据本发明的主动补偿模块51控制,以便考虑来自专用运动参考单元的信息而稳定平台9。
[0208]
根据优选实施例,连接装置10包括集成上述致动器101、102的连结构件105。
[0209]
该连结构件105例如为臂的形式,并且具有两个端部:
[0210]-第一上端1051,其固定到悬臂32的下游端323,和
[0211]-第二下端1052,其固定到平台9。
[0212]
第一端1051与悬臂32的下游端323的组装以及第二端1052与平台9的组装例如通过与致动器101、102配合的轴承、例如滑动轴承或滚动轴承来实现。
[0213]
优选地,致动器101、102分布在连结构件105的端部1051、1052处:
[0214]-第一上端1051包括所述至少一个第二俯仰回转致动器102,以及
[0215]-第二下端1052包括所述至少一个第一偏航回转致动器101。
[0216]
在此,连结构件105有利地横向地/侧向地固定到悬臂32的下游端323。
[0217]
在这种情况下,连结构件105优选包括两个部段:
[0218]-上部部段1055,其为直线的且平行于偏航旋转轴101',旨在有利地竖直延伸,使得俯仰旋转轴102'穿过悬臂32的下游端323,
[0219]-下部部段1056,其弯曲(或弯折)以使偏航旋转轴101'穿过悬臂32的该相同下游端323。
[0220]
换句话说,偏航旋转轴101'和俯仰旋转轴102'之间的交点有利地位于悬臂32的下游端323。
[0221]
该实施例的优点是保持偏航旋转轴101'和俯仰旋转轴102'在悬臂32的下游端323处的位置。
[0222]
根据另一区别特征,连接装置10包括阻尼装置106,它有利地为被动的,用于提供平台9相对于悬臂32的下游端323的平移自由度。
[0223]
换句话说,阻尼器装置106允许在连结构件105的端部1051、1052之间存在间隙。
[0224]
因此,阻尼器装置106限定了平行于偏航旋转轴101'的平移轴106'。
[0225]
阻尼器装置106有利地置于上部部段1055和下部部段1056之间。
[0226]
阻尼装置106例如包括弹簧和粘性液压悬挂装置,用以防止平台9的急动。
[0227]
根据所示的实施例,平台9例如包括适于容纳至少一个个体的驾驶室。
[0228]
接收平面91有利地对应于该驾驶室的地板。
[0229]
该地板有利地:
[0230]-被包括至少一个进出门93的侧壁92包围,以及
[0231]-在顶部具有顶板95,该顶板有利地顶部具有该连接装置10。
[0232]
该平台9有利地包括至少一个被动减振器95(例如弹性体块),其适于减缓与环境的接触。
[0233]
减振器95例如适于与由风轮机的柱状件承载的平台构成的接收表面r配合,如图6所示。
[0234]
在此,所述至少一个减振器95有利地植入在接收平面91处,例如在接收平面的至少一侧上和/或在其下方(例如,在进出门93处)。
[0235]
通常,平台9有利地配备有手动控制装置(未示出),用于手动控制连接装置10的致动器101、102。
[0236]
仍然通常地,悬臂32的下游端323和连接装置10通过可拆除的连接装置彼此配合,从而集成了电的和机械的连接装置(特别地用于连接装置10的致动器101、102的电源)。
[0237]
所述可拆除的连接装置有利地设置在悬臂32的下游端323和连结构件105的第一(上)端1051之间。
[0238]
因此,连杆构件105在与悬臂32的下游端323分离之后由平台9承载。
[0239]
所述可拆除的连接装置用于根据需要和操作将悬臂32的下游端323与平台9快速装配,或快速放置该平台9。
[0240]
通常,平台9及其连接装置10可以适用于本发明以外的铰接吊杆式起重机。
[0241]
当然,在所附权利要求的框架内,可以对本发明进行各种其它改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。