1.本实用新型涉及地轨技术领域,特别是涉及一种无尘型地轨。
背景技术:
2.地轨又名:t型槽地轨,地梁,地槽铁,基础槽铁,铸铁地轨,条形平台,地轨地轨的用途:根据设备的固定点来设计、拼接成铸梁平台,主要用于大型设备的装配、试验、焊接和检验,地轨的优点:这样不用做成大型的平台,即节省了材料成本,又可以占用很小的空间,可谓是性价比很高。
3.如中国专利公开的公开号为cn208614772u的一种无尘车间机器人行走地轨,轨底座包括支撑脚、主架和横架,承载台包括支撑板、连接件、推送带和护框,支撑板通过连接件活动连接轨道,连接件包括第一连接块和第二连接块,轨道的外侧设有限位组件,限位组件包括电感式接近开关、电控箱和电动推杆;本无尘车间机器人行走地轨,底座的表面平整光洁,护框内壁处安装的隔音棉可以屏蔽噪音,定位块与安装槽相配合,限位组件可以及时给整个装置限位,当出现意外情况或者承载台的行程不可控时,承载台会靠近电感式接近开关,电感式接近开关给电控箱发出信号,电控箱在给电动推杆发出信号,电动推杆推动第二连接块,第二连接块就会与轨道接触,起到了限位的作用,保证了生产安全,但是其在生产过程中,结构运动起来会有一定的磨损,从而产生灰尘,影响车间内部的无尘环境,且传动结构长时间运转,会发生一定的损耗,不能带动机器人精确地停止预定位置的问题。
技术实现要素:
4.针对上述问题,本实用新型提供了一种无尘型地轨,具有特殊结构,运动起来可有效避免产生灰尘适用于工作环境要求高的位置。
5.本实用新型的技术方案是:
6.一种无尘型地轨,包括导轨框架,所述导轨框架一侧外表面固定安装有线缆保护壳,所述导轨框架两侧外表面固定安装有连接支撑块,所述连接支撑块下表面固定设置有支撑脚,所述导轨框架上表面活动安装有移动底板,所述移动底板上表面固定安装有行星减速电机,所述行星减速电机一侧且位于移动底板上表面固定安装有控制主机,所述导轨框架两端固定安装有防护板。
7.上述技术方案的工作原理如下:
8.通过启动设置的行星减速电机与导轨框架相互配合,可以带动移动底板移动,移动底板可以带动机器人沿着铺设的导轨框架移动,线缆保护壳可以保护连接在移动底板上的线缆,使线缆有位置储存,防护板可以防止移动底板失控冲出导轨框架,支撑脚可以为导轨框架提供一定的支撑力,装置整体通过螺母连接固定在一起,方便组装与搬运。
9.在进一步的技术方案中,所述导轨框架内部两侧固定安装有支撑连接块,所述支撑连接块外表面连接有轨道防尘壳,所述轨道防尘壳与支撑连接块外表面均开设有连接螺纹孔,所述支撑连接块与轨道防尘壳通过螺母相互固定连接,所述轨道防尘壳上表面且靠
近一端边缘处位置设置有连接片,所述导轨框架内部固定安装有位移齿条。
10.通过设置的轨道防尘壳可以防止导轨框架上表面聚集灰尘,影响移动底板在导轨框架上表面进行移动,连接片可以防堵两个导轨框架之间的缝隙,防止灰尘等杂物进入导轨框架内部的导轨,位移齿条可以与行星减速电机相互配合。
11.在进一步的技术方案中,所述支撑脚下端面设置有防护固定板。
12.通过防护固定板可以为装置提供更大的接触面积,防止支撑脚压塌地面。
13.在进一步的技术方案中,所述移动底板外表面设置有防护盖,所述移动底板下表面固定安装有异形连接块,所述异形连接块,所述异形连接块下表面固定安装有支撑滑块。
14.通过防护盖可以保护移动底板内部的部件,通过异形连接块可以使支撑滑块穿过轨道防尘壳与导轨相连接。
15.在进一步的技术方案中,所述支撑滑块与导轨框架相互配合,所述移动底板上表面固定安装有机器人安装底座,所述机器人安装底座上表面固定安装有智能机器人。
16.通过支撑滑块可以使移动底板在导轨框架上表面滑动,智能机器人通过机器人安装底座与移动底板相连接。
17.在进一步的技术方案中,所述行星减速电机输出端固定安装有主动齿轮。
18.通过启动行星减速电机可以带动主动齿轮旋转,主动齿轮与位移齿条相互配合,可以带动移动底板移动。
19.在进一步的技术方案中,所述导轨框架上表面活动安装有导轨滑块,所述导轨滑块一端固定安装有激光测距仪。
20.通过导轨滑块可以带动激光测距仪沿着的导轨框架移动,激光测距仪可以测量移动底板的位置。
21.本实用新型的有益效果是:
22.1、通过设置的行星减速电机与位移齿条相互配合,通过启动行星减速电机可以带动主动齿轮旋转,主动齿轮与位移齿条相互配合,可以带动移动底板移动,动底板可以带动机器人沿着铺设的导轨框架移动,避免使用的传统的塑料或pe材质的拖链,可以避免拖链使用时,产生一定的灰尘,影响车间内部的无尘环境;
23.2、通过设置的防护盖与激光测距仪相互配合,防护板可以防止移动底板失控冲出导轨框架,通过导轨滑块可以带动激光测距仪沿着的导轨框架移动,激光测距仪可以测量移动底板的位置,通过将信号传输至控制主机,精确地判断位移底板的位置,不使用传统步进电机控制位移底板位置。
附图说明
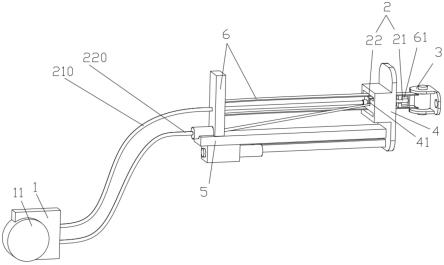
24.图1是本实用新型实施例的整体结构示意图;
25.图2是本实用新型实施例的导轨框架整体图;
26.图3是本实用新型实施例的移动底板放大图;
27.图4是本实用新型实施例的图2中a处放大图;
28.图5是本实用新型实施例的图2中b处放大图。
29.附图标记说明:
30.1、导轨框架;101、线缆保护壳;102、轨道防尘壳;103、位移齿条;104、连接片;105、
支撑连接块;106、连接螺纹孔;2、连接支撑块;201、支撑脚;202、防护固定板;3、移动底板;301、防护盖;302、异形连接块;303、支撑滑块;304、机器人安装底座;4、行星减速电机;401、控制主机;402、主动齿轮;6、防护板;601、导轨滑块;602、激光测距仪;9、智能机器人。
具体实施方式
31.下面结合附图对本实用新型的实施例作进一步说明。
32.实施例:
33.如图1-图5所示,一种无尘型地轨,包括导轨框架1,导轨框架1一侧外表面固定安装有线缆保护壳101,导轨框架1两侧外表面固定安装有连接支撑块2,连接支撑块2下表面固定设置有支撑脚201,导轨框架1上表面活动安装有移动底板3,移动底板3上表面固定安装有行星减速电机4,行星减速电机4一侧且位于移动底板3上表面固定安装有控制主机401,导轨框架1两端固定安装有防护板6。
34.上述技术方案的工作原理如下:
35.通过启动设置的行星减速电机4与导轨框架1相互配合,可以带动移动底板3移动,移动底板3可以带动机器人沿着铺设的导轨框架1移动,线缆保护壳101可以保护连接在移动底板3上的线缆,使线缆有位置储存,防护板6可以防止移动底板3失控冲出导轨框架1,支撑脚201可以为导轨框架1提供一定的支撑力,装置整体通过螺母连接固定在一起,方便组装与搬运。
36.在另外一个实施例中,如图4所示,导轨框架1内部两侧固定安装有支撑连接块105,支撑连接块105外表面连接有轨道防尘壳102,轨道防尘壳102与支撑连接块105外表面均开设有连接螺纹孔106,支撑连接块105与轨道防尘壳102通过螺母相互固定连接,轨道防尘壳102上表面且靠近一端边缘处位置设置有连接片104,导轨框架1内部固定安装有位移齿条103。
37.通过设置的轨道防尘壳102可以防止导轨框架1上表面聚集灰尘,影响移动底板3在导轨框架1上表面进行移动,连接片104可以防堵两个导轨框架1之间的缝隙,防止灰尘等杂物进入导轨框架1内部的导轨,位移齿条103可以与行星减速电机4相互配合。
38.在另外一个实施例中,如图2所示,支撑脚201下端面设置有防护固定板202。
39.通过防护固定板202可以为装置提供更大的接触面积,防止支撑脚201压塌地面。
40.在另外一个实施例中,如图3所示,移动底板3外表面设置有防护盖301,移动底板3下表面固定安装有异形连接块302,异形连接块302,异形连接块302下表面固定安装有支撑滑块303。
41.通过防护盖301可以保护移动底板3内部的部件,通过异形连接块302可以使支撑滑块303穿过轨道防尘壳102与导轨相连接。
42.在另外一个实施例中,如图1所示,支撑滑块303与导轨框架1相互配合,移动底板3上表面固定安装有机器人安装底座304,机器人安装底座304上表面固定安装有智能机器人9。
43.通过支撑滑块303可以使移动底板3在导轨框架1上表面滑动,智能机器人9通过机器人安装底座304与移动底板3相连接。
44.在另外一个实施例中,如图3所示,行星减速电机4输出端固定安装有主动齿轮
402。
45.通过启动行星减速电机4可以带动主动齿轮402旋转,主动齿轮402与位移齿条103相互配合,可以带动移动底板3移动。
46.在另外一个实施例中,如图5所示,导轨框架1上表面活动安装有导轨滑块601,导轨滑块601一端固定安装有激光测距仪602。
47.通过导轨滑块601可以带动激光测距仪602沿着的导轨框架1移动,激光测距仪602可以测量移动底板3的位置。
48.以上实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。