1.本实用新型涉及机器人制造技术领域,具体涉及一种壁挂式晨检机器人。
背景技术:
2.晨检是为加强传染病防控工作而采取的一种措施,目的是为了早期发现传染病病人,防止传播。目前,晨检多是由人工完成,效率比较低,因此,申请人提出了一种晨检机器人,参见公开号为cn214394222u的中国专利文献,该晨检机器人通过第一消毒装置对下巴托消毒,能够有效降低在晨检过程中交叉感染的风险,而通过第二消毒装置对手部消毒,有利于防止病菌传播,并且该晨检机器人的机身背面设有挂架,根据使用需求可挂在墙面或专用支架上。但是上述安装方式不方便调节,影响使用效果。
技术实现要素:
3.本实用新型提供一种壁挂式晨检机器人,以解决现有的晨检机器人不方便调节的技术问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:
5.设计一种壁挂式晨检机器人,包括机器人本体和安装机构,所述安装机构包括安装支架、挂板、挂架,所述挂架设置于所述机器人本体,所述挂板和所述安装支架固定连接,所述挂板和所述挂架固定连接,所述安装支架上设置有定位组件,所述挂架上设有调节组件,所述定位组件、所述调节组件均和所述挂板配合连接。所述定位组件包括设置于所述安装支架上的定位孔以及设置于所述挂板上的定位销。
6.进一步的,所述调节组件包括上卡槽和下卡槽,所述挂板包括上卡板和下卡板,所述上卡槽设置有上挡板,所述上卡板设置于所述上卡槽并由所述上挡板限位,所述下卡板设置于所述下卡槽中,所述下卡板上设有顶丝。通过挂板可以使机器人能够挂在支架或者墙壁上,通过定位组件和调节组件实现机器人高度的调节。
7.进一步的,所述挂板包括凸面和凹面,所述凸面设有和所述安装支架配合的第一螺钉孔,所述凹面设有和所述挂架配合的第二螺钉孔。
8.进一步的,所述定位组件包括套筒、伸缩杆,所述套筒固定于所述挂板上,所述安装支架为两条平行的立杆,所述立杆上设有通孔,所述伸缩杆的一端通过弹簧和所述套筒连接,所述伸缩杆的另一端和所述通孔配合连接。
9.进一步的,所述安装支架为两条平行的立杆,所述立杆上设有滑槽,所述挂板上设有和所述滑槽配合的连杆,所述连杆的下方设置有驱动组件。
10.进一步的,所述驱动组件为升降气缸,所述升降气缸包括外筒、内筒、活塞杆、调节杆,所述外筒和所述活塞杆的底端固定连接,所述内筒和所述活塞杆滑动连接,所述活塞杆的顶端置于所述内筒中,所述活塞杆下方设置有高压气室,所述活塞杆上方设置有调节气室,所述内筒侧面设有连接所述高压气室和所述调节气室的气通道,所述调节杆设置于所述调节气室和所述气通道的连接部。
11.进一步的,所述驱动组件包括升降电机、螺杆、螺套,所述螺套和所述挂板固定连接,所述升降电机驱动所述螺杆转动以使所述挂板上下移动。
12.进一步的,所述安装支架连接有底座,所述底座上设有滚轮,所述滚轮连接有驱动电机。
13.与现有技术相比,本实用新型的有益技术效果在于:
14.1.本实用新型在机器人本体和安装支架上分别设置调节组件和定位组件,先通过定位组件粗调,然后通过调节组件细调,能够选择最合适的检测高位,为检测结果的准确性提供保证。
15.2.本实用新型能够配合手动、气动、电动等多种方式实现高度定位,同时配合底座上的滚轮实现地面移动,方便晨检机器人的使用。
附图说明
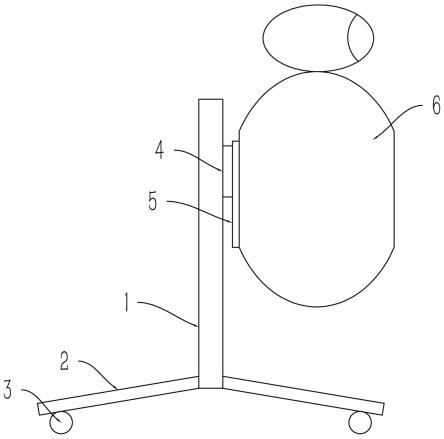
16.图1为本实用新型的结构示意图。
17.图2为本实用新型安装支架的结构示意图。
18.图3为本实用新型调节组件的结构示意图。
19.图4为本实用新型挂板的结构示意图。
20.图5为本实用新型手动定位组件的结构示意图。
21.图6为图5中立杆的垂直部结构示意图。
22.图7为本实用新型气动定位组件的结构示意图。
23.图8为图7中立杆的垂直部结构示意图。
24.图9为本实用新型电动定位组件的结构示意图。
25.图中,安装支架1,垂直部11,水平部12,底座2,滚轮3,挂板4,第一螺钉孔41,第二螺钉孔42,上卡板43,下卡板44,挂架5,上卡槽51,下卡槽52,挡板53,套筒54,弹簧55,伸缩杆56,把手57,机器人本体6,定位孔7,顶丝8,外筒101,内筒102,高压气室103,通道104,调节气室105,活塞杆106,调节杆107,限位块108,连杆109,螺套110,螺杆111,升降电机112,通孔13,滑槽14,底座201。
具体实施方式
26.下面结合附图和实施例来说明本实用新型的具体实施方式,但以下实施例只是用来详细说明本实用新型,并不以任何方式限制本实用新型的范围。
27.实施例1:一种壁挂式晨检机器人,参见图1至图3,包括机器人本体6,机器人本体6的背面设置挂架5,挂架5通过挂板4安装在安装支架1上。具体的,挂架5为两条平行的钢板,其上自上而下设置多组调节组件,调节组件包括上卡槽51和下卡槽52,挂板4包括上卡板43和下卡板44,上卡槽51设置有上挡板53,上卡槽51相较于上卡板43略长使得上卡板43能够顺利以滑动的方式安装到上挡板53内,同时下卡板44设置于下卡槽52中,在下卡板44上设有顶丝,与下卡槽52固定。通过挂板4安装在挂架5上的不同卡槽内,可以调节挂架5以及机器人本体6的高度。
28.在安装支架1上设置定位组件,包括自上而下设置多个定位孔7,挂板4通过定位销固定在安装支架1上,挂板4安装在不同的定位孔上对挂架5以及机器人本体6进行初始的定
位。安装支架1固定在底座2上,底座2可以是四根钢支架,也可以是圆盘状底座,在底座2下部安装滚轮3,滚轮3可由驱动电机控制。
29.实施例2:与实施例1不同之处在于,不设安装支架1,机器人本体6通过挂板4安装在墙面上。参见图4,挂板4包括凸面和凹面,凸面设有和安装支架配合的第一螺钉孔41,凹面设有和挂架配合的第二螺钉孔42。能够随时因地制宜,更加简化安装结构,同时通过上述两处螺钉孔实现初始定位和调节定位。
30.实施例3:参见图5和图6,与实施例1的不同之处在于,定位组件包括套筒54、伸缩杆56,套筒54固定于挂板4上,安装支架1为两条平行的角钢,角钢的水平部12与挂板4贴合,角钢的垂直部11上则设置通孔13,伸缩杆56的一端通过弹簧55和套筒54连接,伸缩杆56的另一端和通孔13配合连接。使用时,向内压紧把手57将伸缩杆56向中间收拢并退出安装支架1,此时挂板4可在安装支架1中上下滑动,定位后松开把手57,伸缩杆56伸长至对应的通孔完成定位。
31.实施例4:参见图7和图8,安装支架1为两条平行的立杆,立杆上设有滑槽14,挂板4上固定有限位块108,连杆109固定在限位块108上并和滑槽14配合,连杆109的下方连接有升降气缸,升降气缸包括外筒101、内筒102、活塞杆106、调节杆107,外筒101和活塞杆106的底端固定连接,内筒102和活塞杆106滑动连接,活塞杆106的顶端置于内筒102中,活塞杆106为t字形,其下方设置有高压气室103,活塞杆106上方设置有调节气室105,内筒102侧面设有连接高压气室103和调节气室105的气通道104,调节杆107设置于调节气室105和气通道104的连接部。当抬起调节杆107使气通道104打开时,高压气室103内的气体进入调节气室105,调节气室105气压升高将内筒102顶起带动挂板4上升,之后调节杆107复位达到稳定状态。需要降低高度时,打开调节杆107,向下按压挂板4,将调节气室105中的气体压缩到高压气室103内,挂板4随之下降,然后关闭调节杆107。
32.实施例5:与实施例4的不同之处在于,采用电机驱动的方式升降。具体的,在挂板4背面固定螺套110,螺套110配合安装螺杆111,螺杆111底部连接升降电机112,升降电机112驱动螺杆111转动,通过螺杆驱动的方式带动挂板4上下移动。
33.上面结合附图和实施例对本实用新型作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本实用新型宗旨的前提下,还可以对上述实施例中的各个具体参数进行变更,形成多个具体的实施例,均为本实用新型的常见变化范围,在此不再一一详述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
