1.本实用新型涉及电子元器件加工技术领域,特别是指一种电子元器件数字工厂多工位可旋转待料装置。
背景技术:
2.目前在各种电路系统中,电感线圈都有着极为重要的作用,得到了广泛的运用。市面上有一种电感线圈是由一对线圈一圈靠一圈地缠绕在圆环上,圆环是一种绝缘管从而使得线圈彼此相互绝缘,缠绕一定匝数后引出四个引脚,同时为了增加电感量,通常在圆环内腔设置铁芯或磁粉芯,这种电感线圈按照外形分为三大类,即无底座无底板的电感线圈、带底座的电感线圈和带底板的电感线圈。
3.现有技术中,如图1所示的带底座的电感线圈在生产加工时,缠绕有线圈的圆环需要与底座固定连接,现有的固定方法主要是通过点胶机进行点胶(点胶位置如图1中黑点所示),即电感线圈与底座接触面进行四围点胶。为实现自动化点胶,通常需要将待点胶的电感线圈放置在待料机构上。现有的待料机构每次只能放置一个产品(电感线圈),即点胶时为单个点胶,效率相对较低;而如果在待料机构上放置多个产品,则如何使多个产品能同步转动,这是急需解决的问题。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种能够放置多个电感线圈且能使电感线圈同步转动,效率高的电子元器件数字工厂多工位可旋转待料装置。
5.为解决上述技术问题,本实用新型提供技术方案如下:
6.一种电子元器件数字工厂多工位可旋转待料装置,包括翻转支架,其中:
7.所述翻转支架上设有至少两个可原地旋转用于放置待点胶电感线圈的待料座;
8.所述翻转支架上设有能够驱动所述待料座同步转动的旋转驱动装置,所述旋转驱动装置包括旋转马达和同步结构,所述旋转马达设置在所述翻转支架的下方,所述旋转马达的输出轴穿过所述翻转支架通过所述同步结构驱动连接所述待料座;
9.所述翻转支架的长度方向的一侧设有用于驱动所述翻转支架翻转的翻转驱动装置。
10.进一步的,所述待料座为一对待料座,所述旋转马达的输出轴和所述一对待料座沿所述翻转支架的长度方向排列,所述一对待料座分别位于所述旋转马达的输出轴的两侧,所述同步结构包括设置在所述旋转马达的输出轴上的主动齿轮和设置在所述一对待料座上与所述主动齿轮相啮合的从动齿轮。
11.进一步的,所述同步结构包括设置在所述旋转马达的输出轴上的主动齿轮和设置在所述待料座上的从动齿轮,所述主动齿轮和从动齿轮通过链条传动。
12.进一步的,所述翻转支架上设有轴孔,所述轴孔内设有轴承,所述待料座的下方设有插设在所述轴承的内孔中的中心轴,所述从动齿轮安装在所述中心轴上。
13.进一步的,所述待料座的上端设有用于放置待点胶电感线圈的凹槽,所述凹槽内设有用于容纳待点胶电感线圈的引脚的引脚插接孔。
14.进一步的,所述待料座上在所述凹槽的下方设有沿所述凹槽长度方向贯穿延伸的开窗,所述开窗内设有用于吸附电感线圈的磁铁。
15.进一步的,所述翻转支架的长度方向的一侧设有翻转马达座,所述翻转驱动装置为设置在所述翻转马达座上的翻转马达,所述翻转马达的输出轴驱动连接所述翻转支架。
16.进一步的,所述翻转马达座上设有l形的传感器支架,所述传感器支架的竖杆部固设在所述翻转马达座上,所述传感器支架的横杆部上设有与所述待料座相对应用于检测待点胶电感线圈是否已放置在待料座上的红外传感器;
17.或者,所述凹槽内设有用于检测待点胶电感线圈是否已放置在待料座上的红外传感器,该红外传感器的发射端位于所述凹槽的一个侧壁上,接收端位于所述凹槽的另一个侧壁上。
18.进一步的,所述翻转支架上在其中一个待料座的侧面设有第一竖板,所述第一竖板朝向该待料座的一侧具有u形口,所述u形口内设有用于检测该待料座转动位置的红外传感器,该红外传感器的发射端位于所述u形口的一个侧壁上,接收端位于所述u形口的另一个侧壁上,该待料座上设有向外伸出且随该待料座转动后能够进入所述u形口的第一挡片;
19.或者,所述翻转支架上设有用于检测待料座转动位置的红外传感器,该红外传感器的发射端位于其中一个待料座的开窗内,接收端位于相邻待料座的开窗内。
20.进一步的,所述翻转马达座上设有第二竖板,所述第二竖板朝向所述翻转马达的输出轴的一侧具有u形口,该u形口内设有用于检测翻转支架转动位置的红外传感器,该红外传感器的发射端位于该u形口的一个侧壁上,接收端位于该u形口的另一个侧壁上,所述翻转马达的输出轴上设有向外伸出且随输出轴转动后能够进入该u形口的第二挡片。
21.本实用新型具有以下有益效果:
22.本实用新型的电子元器件数字工厂多工位可旋转待料装置,翻转支架上设有至少两个可原地旋转用于放置待点胶电感线圈的待料座,翻转支架上旋转驱动装置的旋转马达的输出轴穿过翻转支架通过同步结构驱动连接待料座,相比于现有技术,本实用新型的电子元器件数字工厂多工位可旋转待料装置能够放置多个待点胶电感线圈且能使待点胶电感线圈同步转动,在相同的时间内,提升了生产效率,且确保了产品质量。
附图说明
23.图1为现有技术中电感线圈的结构示意图;
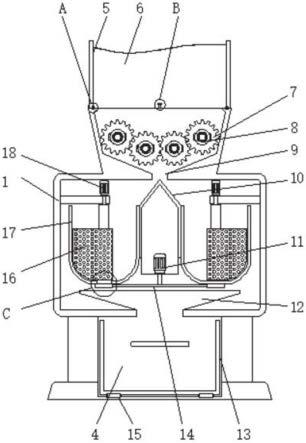
24.图2为本实用新型的电子元器件数字工厂多工位可旋转待料装置的结构示意图,其中(a)为外部结构示意图,(b)为齿轮箱体打开后的内部结构示意图;
25.图3为图2所示电子元器件数字工厂多工位可旋转待料装置的剖视结构示意图;
26.图4为图3中轴承和中心轴的配合关系示意图;
27.图5为本实用新型的电子元器件数字工厂多工位可旋转待料装置的改进结构示意图。
具体实施方式
28.为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
29.一方面,本实用新型提供一种电子元器件数字工厂多工位可旋转待料装置,如图2-5所示,包括翻转支架2,其中:
30.翻转支架2上设有至少两个可原地旋转用于放置待点胶电感线圈的待料座10;
31.翻转支架2上设有能够驱动待料座10同步转动的旋转驱动装置,旋转驱动装置包括旋转马达5和同步结构,旋转马达5设置在翻转支架2的下方,旋转马达5的输出轴穿过翻转支架2通过同步结构驱动连接待料座10;
32.翻转支架2的长度方向的一侧设有用于驱动翻转支架2翻转的翻转驱动装置。
33.使用时,将待点胶电感线圈放置在待料座上,翻转驱动装置驱动翻转支架由零点/初始工位到点胶工位,旋转驱动装置的旋转马达通过同步结构驱动待料座同步旋转至各点胶位置,使待点胶电感线圈完成四围点胶。
34.本实用新型的电子元器件数字工厂多工位可旋转待料装置,翻转支架上设有至少两个可原地旋转用于放置待点胶电感线圈的待料座,翻转支架上旋转驱动装置的旋转马达的输出轴穿过翻转支架通过同步结构驱动连接待料座,相比于现有技术,本实用新型的电子元器件数字工厂多工位可旋转待料装置能够放置多个待点胶电感线圈且能使待点胶电感线圈同步转动,在相同的时间内,提升了生产效率,且确保了产品质量。
35.本实用新型中同步结构可以采用本领域技术人员容易想到的各种结构形式,根据同步结构的不同形式,本实用新型可以有以下实施例:
36.实施例1
37.如图2-3和图5所示,待料座10为一对待料座,旋转马达5的输出轴和一对待料座沿翻转支架2的长度方向排列,一对待料座10分别位于旋转马达5的输出轴的两侧,同步结构包括设置在旋转马达5的输出轴上的主动齿轮11和设置在一对待料座10上与主动齿轮11相啮合的从动齿轮8,此时旋转马达5的输出轴带动主动齿轮11转动,主动齿轮11带动待料座10上的从动齿轮8转动,进而使一对待料座10同步转动(即旋转相同角度)。
38.实施例2(未示出)
39.本实施例的结构与实施例1的结构基本相同,不同之处在于:同步结构包括设置在旋转马达的输出轴上的主动齿轮和设置在待料座上的从动齿轮,主动齿轮和从动齿轮通过链条传动;本实施例中待料座的数量可以为多个(两个或是更多)且沿翻转支架的长度方向排列,旋转马达的输出轴上的主动齿轮可以位于端部且通过链条驱动待料座上的从动齿轮;此时旋转马达的输出轴带动主动齿轮转动,主动齿轮通过链条驱动待料座上的从动齿轮转动,进而使待料座同步转动。
40.为使待料座10可原地旋转的装配在翻转支架2上,可以采用本领域技术人员容易想到的各种结构形式,然而为便于实施,本实用新型优选采用以下结构形式:
41.如图2-4所示,翻转支架2上设有轴孔,轴孔内设有轴承7,待料座10的下方设有插设在轴承7的内孔中的中心轴9,从动齿轮8安装在中心轴9上。为便于中心轴9与轴承7的装配,中心轴9从下至上(即图4中从左至右)依次可以包括与轴承7下端面相配合的定位凸台段91、与轴承7的内孔相配合的轴承安装轴段92、以及用于安装从动齿轮8的齿轮安装轴段
93。上述的轴承7、中心轴9和从动齿轮8在装配时,先将轴承7镶嵌在翻转支架2上的轴孔内,再将中心轴9穿过轴承7的内孔,并把中心轴9的定位凸台段91与轴承7的下端面压装紧密贴合,然后把从动齿轮8套设在中心轴9的齿轮安装轴段93上,使从动齿轮8的下端面与轴承7的上端面贴合并可用顶丝紧固。
42.如图2所示,为便于放置待点胶电感线圈,待料座10的上端可以设有用于放置待点胶电感线圈的凹槽101,凹槽101内设有用于容纳待点胶电感线圈的引脚的引脚插接孔102。为防止待点胶电感线圈从待料座10上脱落,待料座10上在凹槽101的下方可以设有沿凹槽101长度方向贯穿延伸的开窗103,开窗103内设有用于吸附电感线圈的磁铁(未示出)。
43.本实用新型中的翻转驱动装置优选采用以下结构形式:
44.如图2所示,翻转支架2的长度方向的一侧可以设有翻转马达座,翻转驱动装置为设置在翻转马达座上的翻转马达1,翻转马达1的输出轴驱动连接翻转支架2。此时翻转马达1的输出轴转动即可带动翻转支架2翻转,进而使位于翻转支架2上的待料座10翻转至点胶工位。翻转马达座可以包括横向的固定底板4和竖向的固定立板3,此时翻转马达座优选为l形,翻转马达1可以固定在固定立板3上,翻转马达1的输出轴穿过固定立板3驱动连接翻转支架2。
45.待料座10优选位于翻转支架2沿长度方向的中心线上;翻转马达1的输出轴的轴线优选与翻转支架2沿长度方向的中心线在同一条直线上,可便于翻转马达1驱动翻转支架2翻转。为保护同步结构,翻转支架2上可以设有将同步结构隐藏的齿轮箱体12。
46.在点胶过程中为检测待点胶电感线圈是否已放置在待料座10上,本实用新型可以有以下结构形式:
47.结构形式一:如图5所示,翻转马达座(即固定立板3)上可以设有l形的传感器支架13,传感器支架13的竖杆部固设在翻转马达座上,传感器支架13的横杆部上设有与待料座10相对应用于检测待点胶电感线圈是否已放置在待料座上的红外传感器14,具体的,该红外传感器14的发射端和接收端可以为一体结构且均位于传感器支架13的横杆部上,该红外传感器14工作时,发射端向待料座10上方发射红外光,当待料座10上有待点胶电感线圈时,待点胶电感线圈将红外光反射至接收端,该红外传感器14即可得知待料座10上已放置了待点胶电感线圈,反之则未放置;图中所示实施例中,待料座10和红外传感器14的数量均为两个。
48.结构形式二(未示出):凹槽101内可以设有用于检测待点胶电感线圈是否已放置在待料座上的红外传感器,该红外传感器的发射端位于凹槽101的一个侧壁上,接收端位于凹槽101的另一个侧壁上,该红外传感器工作时,发射端向接收端发射红外光,当待料座上已放置待点胶电感线圈时(即凹槽101内有待点胶电感线圈),待点胶电感线圈阻挡发射端向接收端发射的红外光,该红外传感器即可得知待料座上已放置了待点胶电感线圈,反之则未放置。
49.在点胶过程中为检测待料座10的转动位置,本实用新型可以有以下结构形式:
50.结构形式三:如图5所示,翻转支架2上在其中一个待料座10的侧面可以设有第一竖板15,第一竖板15朝向该待料座10的一侧具有u形口,u形口内设有用于检测该待料座10转动位置(初始位置,也即零位)的红外传感器,该红外传感器的发射端位于u形口的一个侧壁上,接收端位于u形口的另一个侧壁上,该待料座10上设有向外(即远离待料座10的轴线
方向)伸出且随该待料座10转动后能够进入u形口的第一挡片17,该红外传感器工作时,发射端向接收端发射红外光,当待料座10转动后,其上的第一挡片17位于第一竖板15的u形口内时,第一挡片17阻挡发射端向接收端发射的红外光,该红外传感器即可得知待料座10的位置在初始位置,反之则不在初始位置;
51.结构形式四:翻转支架2上可以设有用于检测待料座转动位置的红外传感器,该红外传感器的发射端位于其中一个待料座10的开窗103内,接收端位于相邻待料座10的开窗103内,该红外传感器工作时,发射端发射红外光,当接收端接收到红外光时,该红外传感器即可得知两个待料座的位置都在初始位置,反之则不在初始位置。
52.为便于检测翻转支架2的转动位置,翻转马达座(即固定立板3)上可以设有第二竖板19,第二竖板19朝向翻转马达1的输出轴的一侧具有u形口,该u形口内设有用于检测翻转支架2转动位置的红外传感器,该红外传感器的发射端位于该u形口的一个侧壁上,接收端位于该u形口的另一个侧壁上,翻转马达5的输出轴上设有向外(即远离翻转马达5的轴线方向)伸出且随输出轴转动后能够进入该u形口的第二挡片18,该红外传感器工作时,发射端向接收端发射红外光,当翻转马达5的输出轴转动后,其上的第二挡片18位于第二竖板19的u形口内时,第二挡片18阻挡发射端向接收端发射的红外光,该红外传感器即可得知翻转支架2的位置在初始位置,反之则不在初始位置。
53.另一方面,本实用新型提供一种利用上述的电子元器件数字工厂多工位可旋转待料装置进行点胶的方法,所述方法包括:
54.步骤1:当待点胶电感线圈放置在所述待料座10上后,所述翻转驱动装置驱动所述翻转支架2由零点工位进行顺时针翻转90度,当所述翻转支架2翻转90度后,点胶机的点胶阀由初始待料工位移动到点胶工位,开始对待点胶电感线圈的第一个面点胶;
55.本步骤中,设备通电后,可以先使翻转支架2和待料座10复位到零位,传感器支架13上的红外传感器14感应到待料座10上有待点胶电感线圈,翻转驱动装置再开始工作,翻转支架2和待料座10复位到零位的具体操作过程可以如下:
56.翻转马达1的输出轴转动,使翻转马达1的输出轴上的第二挡片18位于固定立板3上第二竖板19的u形口内,进而使翻转支架2复位到零位;旋转马达5的输出轴转动,使旋转马达5的输出轴上的第一挡片17位于翻转支架2上第一竖板15的u形口内,使待料座10复位到零位;
57.步骤3:当待点胶电感线圈的第一个面点胶完成后,所述旋转驱动装置的旋转马达5通过同步结构驱动所述待料座10同步顺时针旋转90度,当所述待料座10旋转90度后,开始对待点胶电感线圈的第二个面点胶;
58.步骤4:当待点胶电感线圈的第二个面点胶完成后,所述旋转驱动装置的旋转马达5通过所述同步结构驱动所述待料座10再次同步顺时针旋转90度,当所述待料座10旋转90度后,开始对待点胶电感线圈的第三个面点胶;
59.步骤5:当待点胶电感线圈的第三个面点胶完成后,所述旋转驱动装置的旋转马达5通过所述同步结构驱动所述待料座10再次同步顺时针旋转90度,当所述待料座10旋转90度后,开始对待点胶电感线圈的第四个面点胶;
60.步骤6:当待点胶电感线圈的第四个面点胶完成后,点胶机的点胶阀回到初始待料工位,当点胶阀回到初始待料工位后,所述翻转驱动装置驱动翻转支架2回到零点工位,待
点胶电感线圈点胶完成,取下电感线圈;
61.本步骤中,取下电感线圈后,可以利用翻转马达1驱动翻转支架2进行零点校准(参考步骤1),翻转支架2完成零点校准后,可以利用旋转马达5驱动待料座10进行零点校准(参考步骤1),待料座10完成零点校准后,可以进行下一组产品(待点胶电感线圈)生产。
62.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。