1.本实用新型涉及无人机的技术领域,尤其是涉及一种可变形陆空两栖无人机。
背景技术:
2.随着人工智能技术的进步,无人机领域的发展日新月异,无人机将会在未来的空中作业中担任重要的角色,四旋翼无人机广泛应用于航拍、快递运送、巡检等领域。传统四旋翼无人机的运动模式单一,仅仅局限于空中飞行,空中飞行耗电量极大,使得续航时间大大减少,有许多实际场景应用中需要勘探山洞等狭小环境,而无人机不适合在这么狭小环境中飞行。再比如在城市搜救场景中,传统的四旋翼无人机仅仅能够飞到被搜救场景上方来取得航拍数据,很难进入到一些狭窄的空间或者室内进行侦测。所以在实际场景中,需要的是一种飞行与陆地行驶相结合的机器人系统,一方面,机器人可以根据实际的环境状况来灵活的选择运动模式,进而大大降低机器人本身所携带的电量。另一方面无人机如果实现路面或者崎岖地面行驶能力,则可以极大的扩展搜索范围。现有的一些两栖无人机也仅仅是在无人机的基础上加装了轮式机构实现路面的运动,结构冗余,给无人机带来了额外的载荷,降低了续航时间,地面通过能力弱,横向面积大,运动不灵活不能通过一些狭小的区域,技术难度大不容易实现。
3.如专利号cn108583181b公布的可变形陆空两栖无人机,该专利主要介绍改进的无人机结构中的变形结构、传动机构以及主轴;无人机机体可以根据环境进行变换,变换成一个轮式结构,通过四个电机转向控制机器人的前进和后退,但是这种结构地形要求较高,必须是平坦的路面,不然很容易侧翻,这样造成地面使用场景十分局限。
4.如专利号cn209409728u公布的陆空两栖无人机,该专利在飞行机体上增加了轮式结构;但是在无人机本身增加了轮式底盘重量,无人机飞行时需要拖动轮式底盘一起飞行,消耗了很大一部分电力,大大减少了电池续航时间,而且车轮过小,路面要求比较高。因此,设计一种能省电、适应全地形的陆空两栖无人机尤为重要。
技术实现要素:
5.本实用新型目的在于提供一种可变形陆空两栖无人机,以解决上述现有技术中的技术问题。
6.为实现上述目的,本实用新型的可变形陆空两栖无人机的具体技术方案如下:
7.一种可变形陆空两栖无人机,包括机体,所述机体的四个边角处均铰接有可折叠机臂,所述可折叠机臂远端设有驱动构件,所述驱动构件上端安装有桨翼,所述桨翼外侧设有环形轮胎,所述环形轮胎通过卡扣与所述桨翼固定连接。
8.进一步,所述机体上方安装有可拆卸的由八根支撑杆组成的电池存放平台,所述电池存放平台上方安装有锂电池,所述电池存放平台和机体之间的中空结构形成核心控件保护罩,所述核心控件保护罩内部安装有holybro pixhawk4飞行控制单元,所述holybro pixhawk4飞行控制单元一侧设有et07型接收机。
9.进一步,所述holybro pixhawk4飞行控制单元设有分电板,所述分电板上设有xt60电池接口,所述xt60电池接口与锂电池电性连接。
10.进一步,所述holybro pixhawk4飞行控制单元的pwm波输出口与驱动构件电性连接,holybro pixhawk4飞行控制单元通过控制输出pwm波的范围来控制驱动构件的转速。
11.进一步,所述机体上方设有gps高精度定位装置,所述gps高精度定位装置与holybro pixhawk4飞行控制单元电性连接。
12.进一步,所述可折叠机臂由一对链接臂组成,所述链接臂为中空结构且内部嵌合安装有第一数字舵机,用于控制链接臂转动。
13.进一步,所述链接臂通过旋转单元转动连接,所述旋转单元为能够360度转动的核心轴。
14.进一步,所述可折叠机臂与驱动构件连接端设有第二数字舵机,用于调整驱动构件和可折叠机臂之间的角度。
15.进一步,所述holybro pixhawk4飞行控制单元上设有stm32f103芯片,用于控制第一数字舵机和第二数字舵机。
16.与现有技术相比,本实用新型的有益效果是:本实用新型具备陆空两种模式,可侦测环境变大,空中模式表现为无人机模式,加装了环形轮胎,提高飞行安全性;陆地模式表现为全地形无人车,负责地面环境勘探,更有利于未知区域的勘探,比如山洞、缝隙等狭小环境,无人机由于飞行的不确定性难以通过,此时全地形无人车就发挥了关键作用。本实用新型设计的可变形陆空无人机结构简单,四个机臂与机体铰接,如需变形,只需将机臂向无人机机体底部折叠,操作简单;本质上没有增加无人机整体的重量,只是加装四个环形轮胎用于陆地航行和碰撞保护。
附图说明
17.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
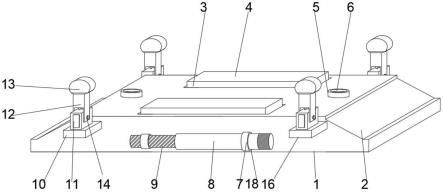
18.图1为本实用新型未变形状态的结构示意图;
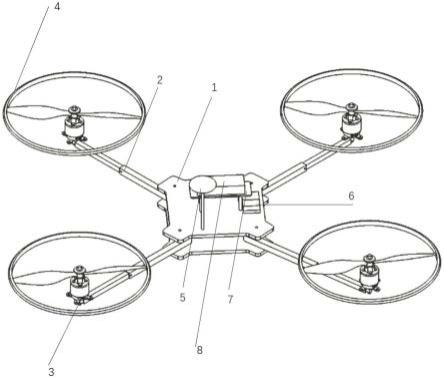
19.图2为本实用新型变形状态的结构示意图;
20.图中标记说明:1、机体;2、可折叠机臂;3、驱动构件;4、环形轮胎;5、gps高精度定位装置;6、et07型接收机;7、holybro pixhawk4飞行控制单元;8、锂电池;9、第一数字舵机;10、旋转单元。
具体实施方式
21.为了更好地了解本实用新型的目的、结构及功能,下面结合附图,对本实用新型一种可变形陆空两栖无人机做进一步详细的描述。
22.请参阅图1-2,本实用新型提供一种技术方案:一种可变形陆空两栖无人机,包括机体1,所述机体1的四个边角处均铰接有可折叠机臂2,使得四个可折叠机臂2能够向无人机机体底部折叠;当需要飞行时,可折叠机臂2可以手动或自动展开,当需要陆地航行时,可
折叠机臂2可以向无人机底部折叠,此时就切换到陆地模式;所述可折叠机臂2远端设有驱动构件3,所述驱动构件3可以是电机,所述驱动构件3通过控制线路连接电源,所述驱动构件3上端安装有桨翼,当接通电源后,通过驱动构件3能够带动桨翼的转动;所述桨翼外侧设有环形轮胎4,所述环形轮胎4通过卡扣与所述桨翼固定连接,当桨翼转动时,带动环形轮胎4转动,充当变形后的无人车车胎,车胎四周加装橡胶,可以增加无人车的缓震和抓地力,环形轮胎4也有机翼保护罩的作用,可以提高飞行安全性。
23.进一步,所述机体1上方安装有可拆卸的由八根支撑杆组成的电池存放平台,所述电池存放平台上方安装有锂电池8,所述电池存放平台和机体1之间的中空结构形成核心控件保护罩,所述核心控件保护罩内部安装有holybro pixhawk4飞行控制单元7,所述holybro pixhawk4飞行控制单元7一侧设有et07型接收机6。
24.进一步,所述holybro pixhawk4飞行控制单元7设有分电板,所述分电板上设有xt60电池接口,所述xt60电池接口与锂电池8电性连接。
25.进一步,所述holybro pixhawk4飞行控制单元7的pwm波输出口与驱动构件3电性连接,holybro pixhawk4飞行控制单元7通过控制输出pwm波的范围来控制驱动构件3的转速,最终实现对无人机姿态、转速的控制。
26.进一步,所述机体1上方设有gps高精度定位装置5,所述gps高精度定位装置5与holybro pixhawk4飞行控制单元7电性连接。
27.进一步,所述可折叠机臂2由一对链接臂组成,所述链接臂选择高强度的铝合金材质,所述链接臂为中空结构,连接驱动构件3和电源的控制线可从所述中空结构通过,减少了线路的缠绕,所述链接臂内部嵌合安装有第一数字舵机9,舵机旋转角度为0-90度,用于控制链接臂转动角度,使链接臂向下折叠,改变车轮与地面的接触面积,从而适应全地形。数字舵机可以将动力脉冲发送给舵机马达之前,对输入的信号根据特定的参数进行处理,做到优化舵机性能,该数字舵机采用pid优化算法,具有自锁功能,能够确保数字舵机的稳定性。
28.进一步,所述链接臂通过旋转单元10转动连接,所述旋转单元10为能够360度转动的核心轴。
29.进一步,所述可折叠机臂2与驱动构件3连接端设有第二数字舵机,用于调整驱动构件3和可折叠机臂2之间的角度,当需要变形时,可折叠机臂2远端的驱动构件3会旋转到与机体1平行的角度,确保四个驱动构件3是平行的。
30.进一步,所述holybro pixhawk4飞行控制单元7上设有stm32f103芯片,用于控制第一数字舵机9和第二数字舵机,其最高72mhz工作频率,在存储器的等待周期访问时可达到1.25dmips/mhz,其运行速率可以满足对链接臂驱动的要求。
31.可以理解,本实用新型是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本实用新型的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本实用新型的精神和范围。因此,本实用新型不受此处所公开的具体实施例的限制,所有落入本技术的权利要求范围内的实施例都属于本实用新型所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。