技术特征:
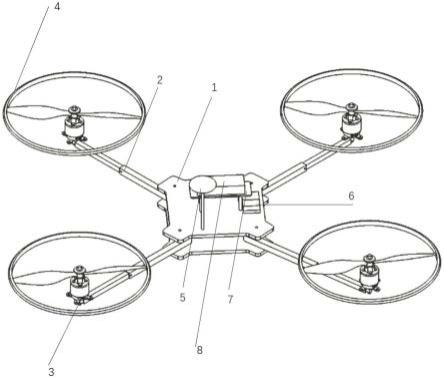
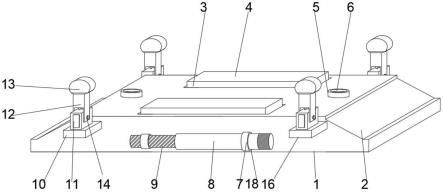
1.一种可变形陆空两栖无人机,其特征在于:包括机体(1),所述机体(1)的四个边角处均铰接有可折叠机臂(2),所述可折叠机臂(2)远端均设有驱动构件(3),所述驱动构件(3)上端安装有桨翼,所述桨翼外侧设有环形轮胎(4),所述环形轮胎(4)通过卡扣与所述桨翼固定连接。2.根据权利要求1所述的可变形陆空两栖无人机,其特征在于,所述机体(1)上方安装有可拆卸的由八根支撑杆组成的电池存放平台,所述电池存放平台上方安装有锂电池(8),所述电池存放平台和机体(1)之间的中空结构形成核心控件保护罩,所述核心控件保护罩内部安装有holybro pixhawk4飞行控制单元(7),所述holybro pixhawk4飞行控制单元(7)一侧设有et07型接收机(6)。3.根据权利要求2所述的可变形陆空两栖无人机,其特征在于,所述holybro pixhawk4飞行控制单元(7)设有分电板,所述分电板上设有xt60电池接口,所述xt60电池接口与锂电池(8)电性连接。4.根据权利要求2所述的可变形陆空两栖无人机,其特征在于,所述holybro pixhawk4飞行控制单元(7)的pwm波输出口与驱动构件(3)电性连接,holybro pixhawk4飞行控制单元(7)通过控制输出pwm波的范围来控制驱动构件(3)的转速。5.根据权利要求2所述的可变形陆空两栖无人机,其特征在于,所述机体(1)上方设有gps高精度定位装置(5),所述gps高精度定位装置(5)与holybro pixhawk4飞行控制单元(7)电性连接。6.根据权利要求1所述的可变形陆空两栖无人机,其特征在于,所述可折叠机臂(2)由一对链接臂组成,所述链接臂为中空结构且内部嵌合安装有第一数字舵机(9),用于控制链接臂转动。7.根据权利要求6所述的可变形陆空两栖无人机,其特征在于,所述链接臂通过旋转单元(10)转动连接,所述旋转单元(10)为能够360度转动的核心轴。8.根据权利要求1所述的可变形陆空两栖无人机,其特征在于,所述可折叠机臂(2)与驱动构件(3)连接端设有第二数字舵机,用于调整驱动构件(3)和可折叠机臂(2)之间的角度。9.根据权利要求2所述的可变形陆空两栖无人机,其特征在于,所述holybro pixhawk4飞行控制单元(7)上设有stm32f103芯片,用于控制第一数字舵机(9)和第二数字舵机。
技术总结
一种可变形陆空两栖无人机,包括包括机体,所述机体的四个边角处各铰接有可折叠机臂,所述可折叠机臂远端均设有驱动构件,所述驱动构件上端均安装有桨翼,所述桨翼外侧均设有环形轮胎,所述环形轮胎均通过卡扣与所述桨翼固定连接。本实用新型的可变形陆空两栖无人机结构简单,四个机臂与机体铰接,如需变形,只需将机臂向无人机机体底部折叠,操作简单;本质上没有增加无人机整体的重量,只是加装四个环形轮胎用于陆地航行和碰撞保护。本实用新型的空中模式表现为无人机模式,加装了环形轮胎作为机翼保护罩,提高飞行安全性;陆地模式表现为全地形无人车,负责地面环境勘探,更有利于未知区域的勘探。于未知区域的勘探。于未知区域的勘探。
技术研发人员:范嘉宇 王炎 刘云平 丁明明 张豪
受保护的技术使用者:南京信息工程大学
技术研发日:2022.01.17
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。