1.本实用新型涉及导航技术领域,特别是一种智能磁条传感器。
背景技术:
2.现有磁条导航传感器采用单排磁感应元件,因此只能判断磁条在磁传感器某个磁感应元件的位置,然后相应感应元件通过电路输出高平或者低平信号。在导航使用时,导航小车处理器只能通过磁感应元件传出信号判断小车的位置是否偏离导航磁条,然后根据此信号来修正小车。采用现有磁条传感器导航的方式存在导航精度不高的问题,无法判断小车与磁条的偏离角度,也就无法得知小车是否将要偏离导航磁条。
技术实现要素:
3.为解决现有技术中存在导航精度低的问题,本实用新型提供了一种智能磁条传感器。
4.本实用新型采用的技术方案是:
5.一种智能磁条传感器,包括电路板和设于电路板上的磁感应元件、处理器和信号输出接口,所述磁感应元件设有两排,每排磁感应元件包括多个磁感应元件,两排磁感应元件相互对称设置,所述磁感应元件的信号输出端连接处理器的信号输入端,所述处理器的信号输出端连接信号输出接口的信号输入端。
6.优选的,两排所述磁感应元件分别设于电路板的其中两相对的边处。
7.优选的,每排所述磁感应元件中相邻的两磁感应元件之间的距离为4cm~6cm。
8.优选的,还包括设于电路板上的角度传感器,所述角度传感器的信号输出端连接处理器的信号输入端。
9.优选的,所述角度传感器设于电路板的正中间处。
10.优选的,所述磁感应元件为霍尔式磁感应元件。
11.本实用新型的有益效果是:
12.采用双排磁感应元件,处理器读取两排磁感应元件中能感应到磁条的磁感应元件的信号,计算两排磁感应元件中能感应到磁条的磁感应元件之间的错位距离,结合两排磁感应元件之间的距离,即可计算出小车偏离磁条的角度,并可通过多种接口方式传出;处理器输出的可以是前后两排磁感应元件的开关量信号,也可以是计算后的角度数字信号;本传感器还可以集成惯性角度传感器,通过惯性角度和磁条感应元件一起来导航提高导航精度。
附图说明
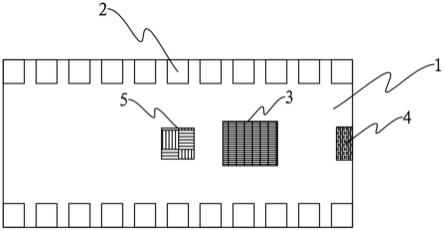
13.图1为本实用新型实施例的结构示意图;
14.图2为本实用新型实施例与磁条处于垂直状态时的示意图;
15.图3为本实用新型实施例与磁条处于非垂直状态时的示意图;
16.附图标记:1、电路板,2、磁感应元件,3、处理器,4、信号输出接口,5、角度传感器,6、磁条。
具体实施方式
17.下面结合附图对本实用新型的实施例进行详细说明。
18.实施例
19.针对现有的磁条传感器采用单排磁感应元件,只能判断磁条在磁传感器某个磁感应元件的位置,因此只能通过磁感应元件传出信号判断小车的位置是否偏离导航磁条,而无法得知小车是否将要偏离导航磁条的问题,本实施例提供一种智能磁条传感器,如图1所示,该智能磁条传感器包括电路板和设于电路板上的磁感应元件、处理器和信号输出接口,磁感应元件设有两排,每排磁感应元件包括多个磁感应元件,两排磁感应元件相互对称设置,磁感应元件的信号输出端连接处理器的信号输入端,处理器的信号输出端连接信号输出接口的信号输入端。
20.本实施例的智能磁条传感器可安装在小车的底部,两排磁感应元件分别对磁条进行感应,为便于计算,该智能磁条传感器安装时尽量保证两排磁感应元件的长度方向与小车的长度方向垂直,即在小车行驶方向与磁条平行时,两排磁感应元件也均与磁条垂直。如图2所示,当小车行驶方向与磁条平行时,两排磁感应元件中能感应到磁条的部分磁感应元件是相互对应的,即在水平方向上没有错位,可为每排磁感应元件中的各磁感应元件按顺序分配id编号,当小车未偏移磁条时,应该是位于中间的若干个磁感应元件感应到磁条,可将中间的若干个磁感应元件的id编号预先存储在处理器中,以便处理器将读取的两排磁感应元件中能感应到磁条的部分磁感应元件的id编号与预存的id编号匹配来判断小车是否偏离磁条,如能匹配上,则表示小车沿未偏航,如未能匹配上,则表示小车已偏航;或者处理器可根据每排磁感应元件中的全部id编号,以及小车行驶方向与磁条的长度方向平行时,磁条的宽度能覆盖的磁感应元件的数量自动计算,如id编号为1、2、3、4、
……
、11,磁条的宽度能覆盖3个磁感应零件,则可以自动计算出小车未偏航时,应该是编号为5-7的磁感应元件能感应到磁条,如处理器检测到实际感应到磁条的磁感应元件的编号与5-7能匹配上,则表示小车沿未偏航,如未能匹配上,则表示小车已偏航;当然判断小车是否停航的方式还可以采用现有判断小车是否偏航的其它多种方式。
21.本实施例的重要改进点在于,还可进一步判断小车的偏移角度,当处理器检测到至少一排磁感应元件中能感应到磁条的部分磁感应元件的id匹配不上时即表示小车已偏航,如图3所示,处理器检读取到前排磁感应元件中能感应到磁条的id为3-7,而后排磁感应元件中能感应到磁条的id为4-8,则两排磁感应元件中能感应到磁条的磁感应元件相互错位1个磁感应元件,则根据相邻两磁感应元件之间的距离与两排磁感应元件之间的距离即可计算出小车偏移的角度,设小车偏移的角度为α,相邻两磁感应元件之间的距离为m,两排磁感应元件之间的距离为n,则tanα=1
×m÷
n,即可算出角度α。当然,本实施例中的计算过程可直接由智能磁条传感器中的处理器进行计算,也可仅通过处理器读取磁感应元件中能感应到磁条的部分磁感应元件,而将信号发送给外部控制器,由外部控制器完成计算。
22.在其中一个实施例中,为避免在小车具有角度偏移时,能及时且尽量检测出偏移角度,防止两排磁感应元件过近,导致在磁条范围内无法行成错位,两排磁感应元件的距离
应尽量远离,因此,可将两排磁感应元件分别设于电路板的其中两相对的边处。
23.在其中一个实施例中,每排所述磁感应元件中相邻的两磁感应元件之间的距离为4cm~6cm。
24.相邻的两磁感应元件之间的距离与该智能磁条传感器的精度紧密相关,该距离越小,则精度越高,但距离太小,所需要的磁感应元件数据也越多,则成本越高,本实施例中,以距离4cm~6cm为宜。
25.在其中一个实施例中,还包括设于电路板上的角度传感器,所述角度传感器的信号输出端连接处理器的信号输入端。
26.由于相邻的磁感应元件之间有间距,在计算夹角时,为有级精度。每级精度范围之内,可通过角度传感器来实现角度的定位以弥补精度不足的问题。由于角度传感器为惯性导航,容易出现累计误差,当累计误差到达磁条传感器下一等级的角度时,按照磁条传感器的角度计算,输出较为准确的角度。
27.在其中一个实施例中,所述角度传感器设于电路板的正中间处以确保角度传感器的检测准确度。
28.在其中一个实施例中,所述磁感应元件为霍尔式磁感应元件。
29.以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
技术特征:
1.一种智能磁条传感器,其特征在于,包括电路板和设于电路板上的磁感应元件、处理器和信号输出接口,所述磁感应元件设有两排,每排磁感应元件包括多个磁感应元件,两排磁感应元件相互对称设置,所述磁感应元件的信号输出端连接处理器的信号输入端,所述处理器的信号输出端连接信号输出接口的信号输入端。2.根据权利要求1所述的智能磁条传感器,其特征在于,两排所述磁感应元件分别设于电路板的其中两相对的边处。3.根据权利要求2所述的智能磁条传感器,其特征在于,每排所述磁感应元件中相邻的两磁感应元件之间的距离为4cm~6cm。4.根据权利要求3所述的智能磁条传感器,其特征在于,还包括设于电路板上的角度传感器,所述角度传感器的信号输出端连接处理器的信号输入端。5.根据权利要求4所述的智能磁条传感器,其特征在于,所述角度传感器设于电路板的正中间处。6.根据权利要求5所述的智能磁条传感器,其特征在于,所述磁感应元件为霍尔式磁感应元件。
技术总结
本实用新型公开了一种智能磁条传感器,涉及导航技术领域,其包括电路板和设于电路板上的磁感应元件、处理器和信号输出接口,所述磁感应元件设有两排,每排磁感应元件包括多个磁感应元件,两排磁感应元件相互对称设置,所述磁感应元件的信号输出端连接处理器的信号输入端,所述处理器的信号输出端连接信号输出接口的信号输入端。采用双排磁感应元件,处理器读取两排磁感应元件中能感应到磁条的磁感应元件的信号,计算两排磁感应元件中能感应到磁条的磁感应元件之间的错位距离,结合两排磁感应元件之间的距离,即可计算出小车偏离磁条的角度。角度。角度。
技术研发人员:卢丹
受保护的技术使用者:成都蜜翼科技有限责任公司
技术研发日:2022.02.15
技术公布日:2022/6/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。